 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Solution to 3D-LiDAR-based Monte Carlo Localization with Fusion of Measurement Model Optimization via Importance Sampling
Paper and Code
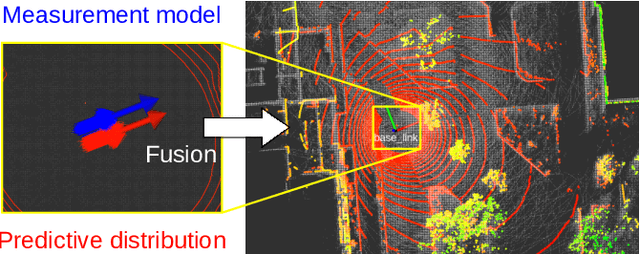
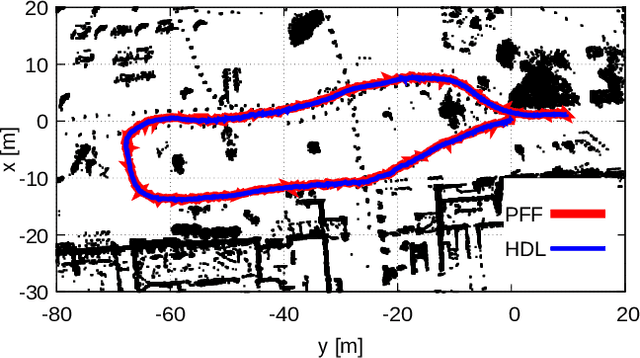
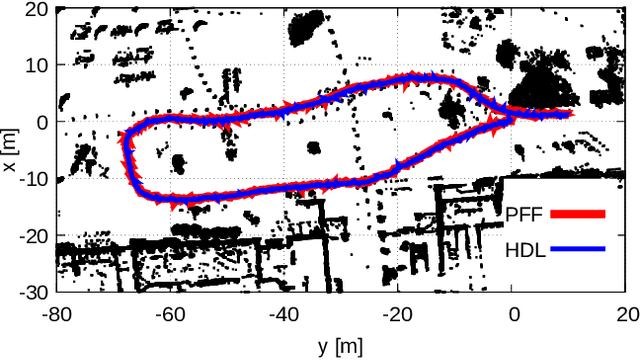
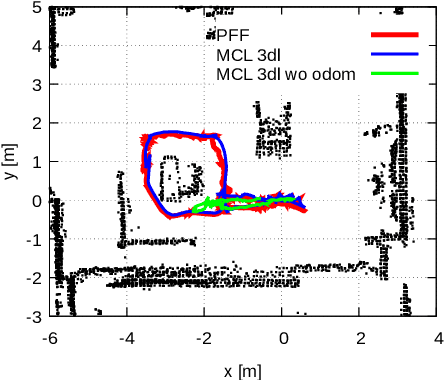
This paper presents an efficient solution to 3D-LiDAR-based Monte Carlo localization (MCL). MCL robustly works if particles are exactly sampled around the ground truth. An inertial navigation system (INS) can be used for accurate sampling, but many particles are still needed to be used for solving the 3D localization problem even if INS is available. In particular, huge number of particles are necessary if INS is not available and it makes infeasible to perform 3D MCL in terms of the computational cost. Scan matching (SM), that is optimization-based localization, efficiently works even though INS is not available because SM can ignore movement constraints of a robot and/or device in its optimization process. However, SM sometimes determines an infeasible estimate against movement. We consider that MCL and SM have complemental advantages and disadvantages and propose a fusion method of MCL and SM. Because SM is considered as optimization of a measurement model in terms of the probabilistic modeling, we perform measurement model optimization as SM. The optimization result is then used to approximate the measurement model distribution and the approximated distribution is used to sample particles. The sampled particles are fused with MCL via importance sampling. As a result, the advantages of MCL and SM can be simultaneously utilized while mitigating their disadvantages. Experiments are conducted on the KITTI dataset and other two open datasets. Results show that the presented method can be run on a single CPU thread and accurately perform localization even if INS is not available.