 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCurriculum Reinforcement Learning from Easy to Hard Tasks Improves LLM Reasoning
Jun 07, 2025We aim to improve the reasoning capabilities of language models via reinforcement learning (RL). Recent RL post-trained models like DeepSeek-R1 have demonstrated reasoning abilities on mathematical and coding tasks. However, prior studies suggest that using RL alone to improve reasoning on inherently difficult tasks is less effective. Here, we draw inspiration from curriculum learning and propose to schedule tasks from easy to hard (E2H), allowing LLMs to build reasoning skills gradually. Our method is termed E2H Reasoner. Empirically, we observe that, although easy tasks are important initially, fading them out through appropriate scheduling is essential in preventing overfitting. Theoretically, we establish convergence guarantees for E2H Reasoner within an approximate policy iteration framework. We derive finite-sample complexity bounds and show that when tasks are appropriately decomposed and conditioned, learning through curriculum stages requires fewer total samples than direct learning. Experiments across multiple domains show that E2H Reasoner significantly improves the reasoning ability of small LLMs (1.5B to 3B), which otherwise struggle when trained with vanilla RL alone, highlighting the effectiveness of our method.
Toward Greater Autonomy in Materials Discovery Agents: Unifying Planning, Physics, and Scientists
Jun 05, 2025We aim at designing language agents with greater autonomy for crystal materials discovery. While most of existing studies restrict the agents to perform specific tasks within predefined workflows, we aim to automate workflow planning given high-level goals and scientist intuition. To this end, we propose Materials Agent unifying Planning, Physics, and Scientists, known as MAPPS. MAPPS consists of a Workflow Planner, a Tool Code Generator, and a Scientific Mediator. The Workflow Planner uses large language models (LLMs) to generate structured and multi-step workflows. The Tool Code Generator synthesizes executable Python code for various tasks, including invoking a force field foundation model that encodes physics. The Scientific Mediator coordinates communications, facilitates scientist feedback, and ensures robustness through error reflection and recovery. By unifying planning, physics, and scientists, MAPPS enables flexible and reliable materials discovery with greater autonomy, achieving a five-fold improvement in stability, uniqueness, and novelty rates compared with prior generative models when evaluated on the MP-20 data. We provide extensive experiments across diverse tasks to show that MAPPS is a promising framework for autonomous materials discovery.
Complex LLM Planning via Automated Heuristics Discovery
Feb 26, 2025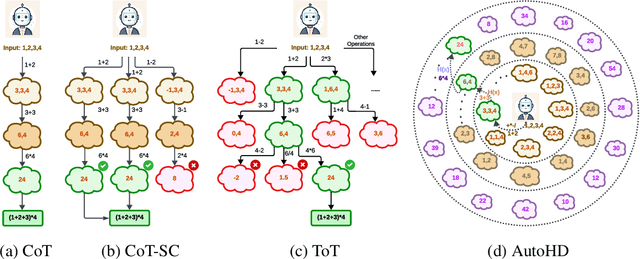



We consider enhancing large language models (LLMs) for complex planning tasks. While existing methods allow LLMs to explore intermediate steps to make plans, they either depend on unreliable self-verification or external verifiers to evaluate these steps, which demand significant data and computations. Here, we propose automated heuristics discovery (AutoHD), a novel approach that enables LLMs to explicitly generate heuristic functions to guide inference-time search, allowing accurate evaluation of intermediate states. These heuristic functions are further refined through a heuristic evolution process, improving their robustness and effectiveness. Our proposed method requires no additional model training or fine-tuning, and the explicit definition of heuristic functions generated by the LLMs provides interpretability and insights into the reasoning process. Extensive experiments across diverse benchmarks demonstrate significant gains over multiple baselines, including nearly twice the accuracy on some datasets, establishing our approach as a reliable and interpretable solution for complex planning tasks.
Inference-Time Computations for LLM Reasoning and Planning: A Benchmark and Insights
Feb 18, 2025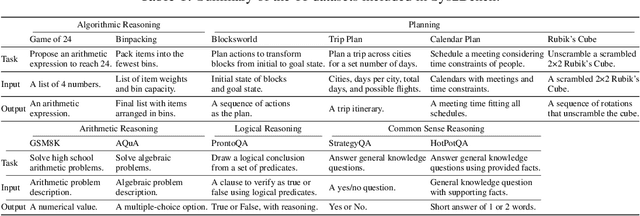

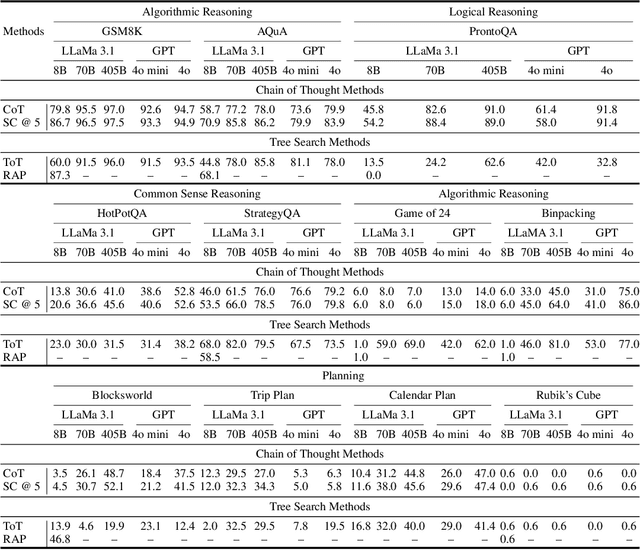

We examine the reasoning and planning capabilities of large language models (LLMs) in solving complex tasks. Recent advances in inference-time techniques demonstrate the potential to enhance LLM reasoning without additional training by exploring intermediate steps during inference. Notably, OpenAI's o1 model shows promising performance through its novel use of multi-step reasoning and verification. Here, we explore how scaling inference-time techniques can improve reasoning and planning, focusing on understanding the tradeoff between computational cost and performance. To this end, we construct a comprehensive benchmark, known as Sys2Bench, and perform extensive experiments evaluating existing inference-time techniques on eleven diverse tasks across five categories, including arithmetic reasoning, logical reasoning, common sense reasoning, algorithmic reasoning, and planning. Our findings indicate that simply scaling inference-time computation has limitations, as no single inference-time technique consistently performs well across all reasoning and planning tasks.
Artificial Intelligence for Science in Quantum, Atomistic, and Continuum Systems
Jul 17, 2023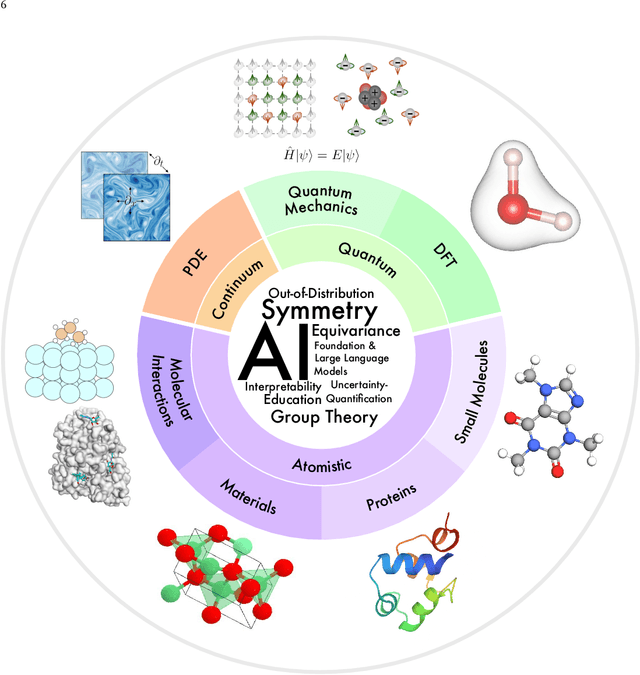
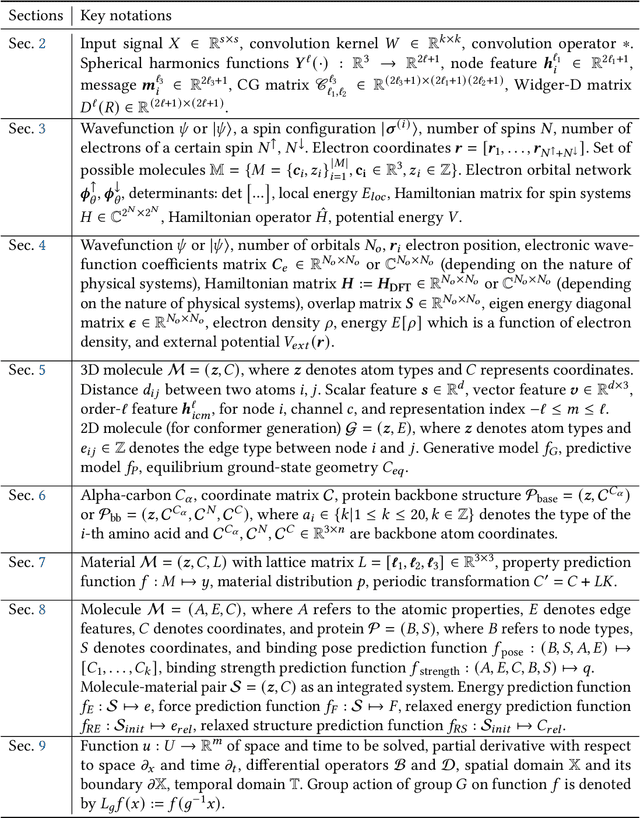
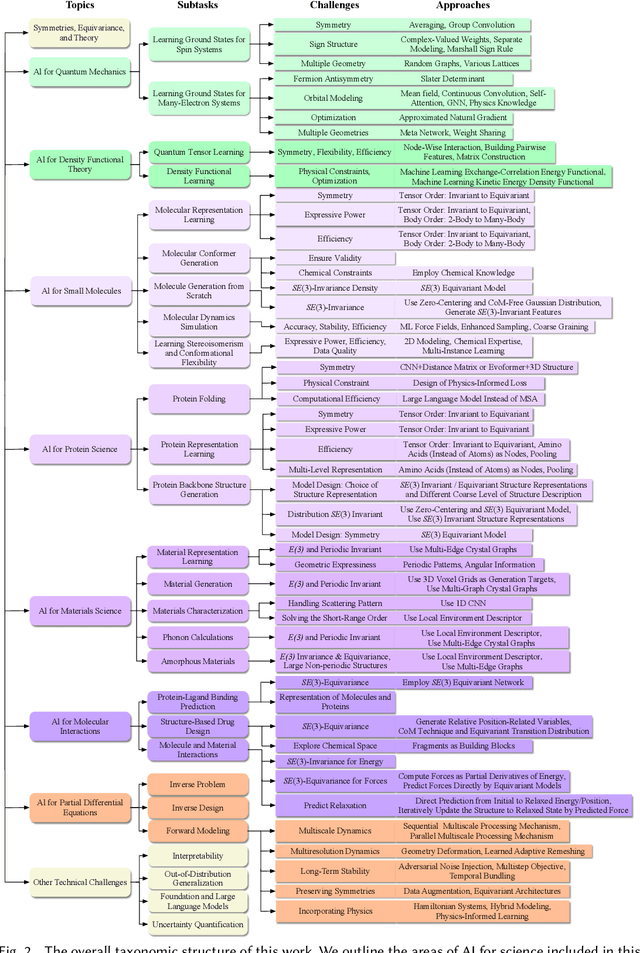
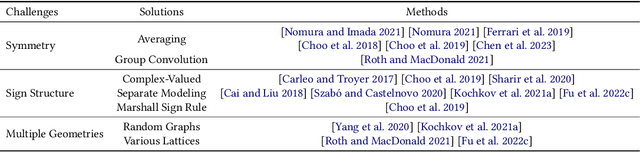
Advances in artificial intelligence (AI) are fueling a new paradigm of discoveries in natural sciences. Today, AI has started to advance natural sciences by improving, accelerating, and enabling our understanding of natural phenomena at a wide range of spatial and temporal scales, giving rise to a new area of research known as AI for science (AI4Science). Being an emerging research paradigm, AI4Science is unique in that it is an enormous and highly interdisciplinary area. Thus, a unified and technical treatment of this field is needed yet challenging. This paper aims to provide a technically thorough account of a subarea of AI4Science; namely, AI for quantum, atomistic, and continuum systems. These areas aim at understanding the physical world from the subatomic (wavefunctions and electron density), atomic (molecules, proteins, materials, and interactions), to macro (fluids, climate, and subsurface) scales and form an important subarea of AI4Science. A unique advantage of focusing on these areas is that they largely share a common set of challenges, thereby allowing a unified and foundational treatment. A key common challenge is how to capture physics first principles, especially symmetries, in natural systems by deep learning methods. We provide an in-depth yet intuitive account of techniques to achieve equivariance to symmetry transformations. We also discuss other common technical challenges, including explainability, out-of-distribution generalization, knowledge transfer with foundation and large language models, and uncertainty quantification. To facilitate learning and education, we provide categorized lists of resources that we found to be useful. We strive to be thorough and unified and hope this initial effort may trigger more community interests and efforts to further advance AI4Science.
Graph Mixup with Soft Alignments
Jun 11, 2023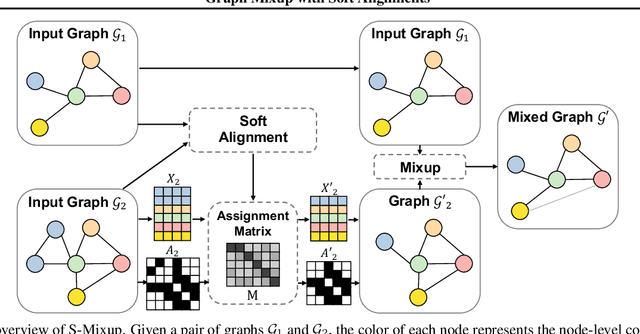



We study graph data augmentation by mixup, which has been used successfully on images. A key operation of mixup is to compute a convex combination of a pair of inputs. This operation is straightforward for grid-like data, such as images, but challenging for graph data. The key difficulty lies in the fact that different graphs typically have different numbers of nodes, and thus there lacks a node-level correspondence between graphs. In this work, we propose S-Mixup, a simple yet effective mixup method for graph classification by soft alignments. Specifically, given a pair of graphs, we explicitly obtain node-level correspondence via computing a soft assignment matrix to match the nodes between two graphs. Based on the soft assignments, we transform the adjacency and node feature matrices of one graph, so that the transformed graph is aligned with the other graph. In this way, any pair of graphs can be mixed directly to generate an augmented graph. We conduct systematic experiments to show that S-Mixup can improve the performance and generalization of graph neural networks (GNNs) on various graph classification tasks. In addition, we show that S-Mixup can increase the robustness of GNNs against noisy labels.
Lattice Convolutional Networks for Learning Ground States of Quantum Many-Body Systems
Jun 15, 2022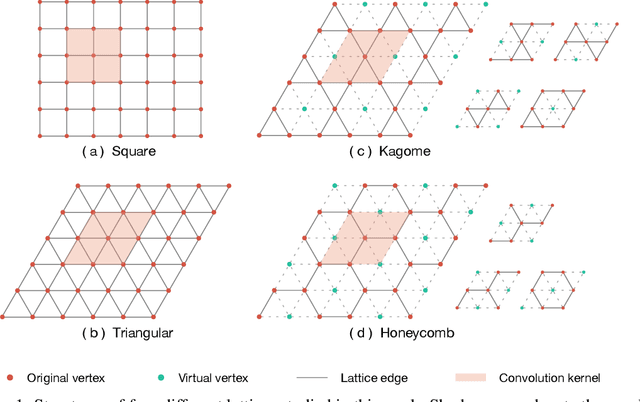
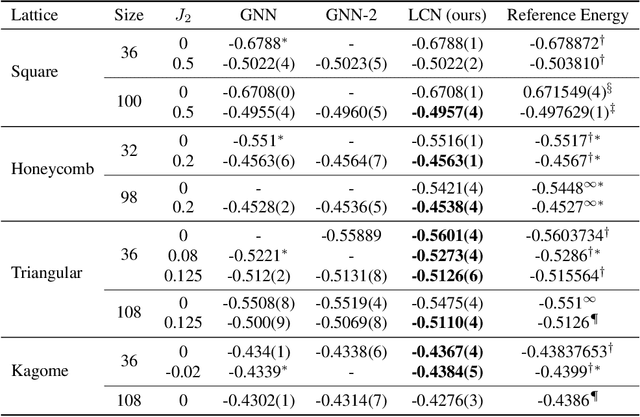
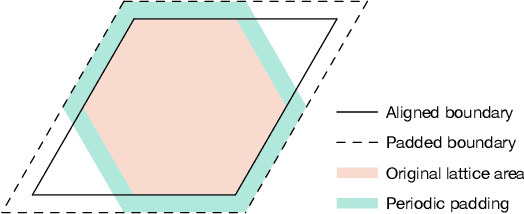
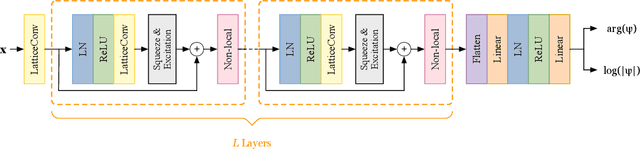
Deep learning methods have been shown to be effective in representing ground-state wave functions of quantum many-body systems. Existing methods use convolutional neural networks (CNNs) for square lattices due to their image-like structures. For non-square lattices, existing method uses graph neural network (GNN) in which structure information is not precisely captured, thereby requiring additional hand-crafted sublattice encoding. In this work, we propose lattice convolutions in which a set of proposed operations are used to convert non-square lattices into grid-like augmented lattices on which regular convolution can be applied. Based on the proposed lattice convolutions, we design lattice convolutional networks (LCN) that use self-gating and attention mechanisms. Experimental results show that our method achieves performance on par or better than existing methods on spin 1/2 $J_1$-$J_2$ Heisenberg model over the square, honeycomb, triangular, and kagome lattices while without using hand-crafted encoding.
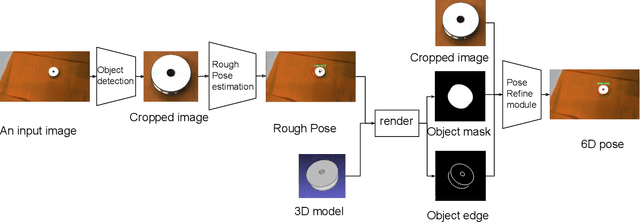
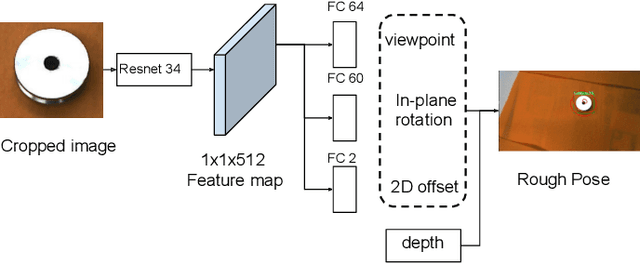
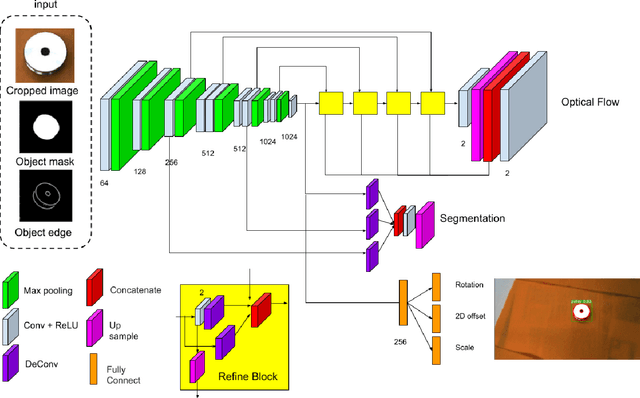
Pose Estimation of Specular and Symmetrical Objects
Oct 31, 2020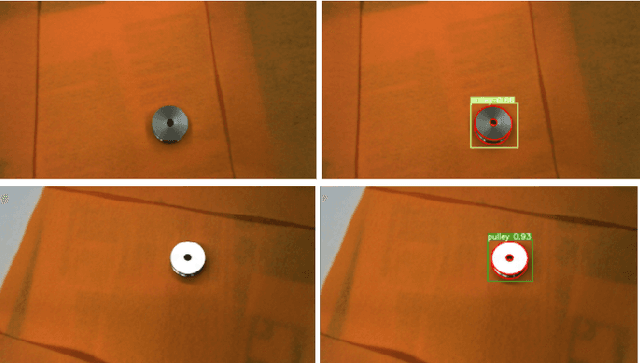
In the robotic industry, specular and textureless metallic components are ubiquitous. The 6D pose estimation of such objects with only a monocular RGB camera is difficult because of the absence of rich texture features. Furthermore, the appearance of specularity heavily depends on the camera viewpoint and environmental light conditions making traditional methods, like template matching, fail. In the last 30 years, pose estimation of the specular object has been a consistent challenge, and most related works require massive knowledge modeling effort for light setups, environment, or the object surface. On the other hand, recent works exhibit the feasibility of 6D pose estimation on a monocular camera with convolutional neural networks(CNNs) however they mostly use opaque objects for evaluation. This paper provides a data-driven solution to estimate the 6D pose of specular objects for grasping them, proposes a cost function for handling symmetry, and demonstrates experimental results showing the system's feasibility.