 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLessons Learned Developing an Assembly System for WRS 2020 Assembly Challenge
Mar 28, 2021
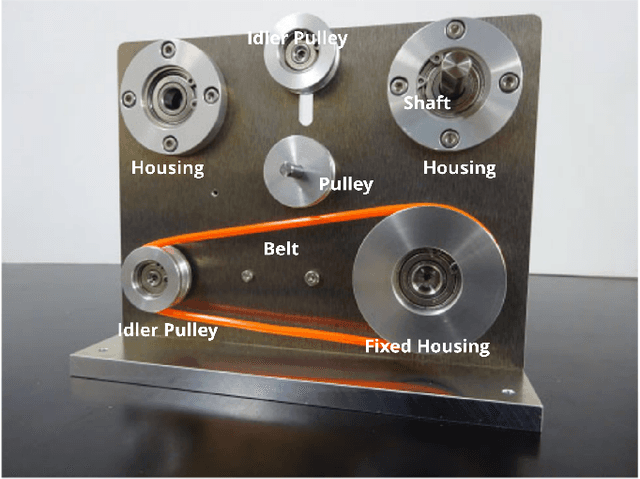

The World Robot Summit (WRS) 2020 Assembly Challenge is designed to allow teams to demonstrate how one can build flexible, robust systems for assembly of machined objects. We present our approach to assembly based on integration of machine vision, robust planning and execution using behavior trees and a hierarchy of recovery strategies to ensure robust operation. Our system was selected for the WRS 2020 Assembly Challenge finals based on robust performance in the qualifying rounds. We present the systems approach adopted for the challenge.
Meta-Modeling of Assembly Contingencies and Planning for Repair
Mar 12, 2021


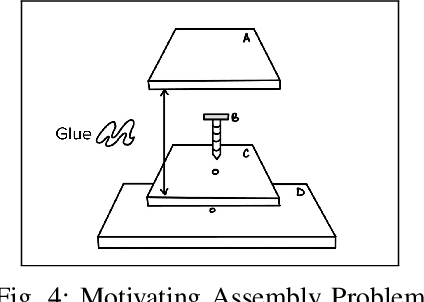
The World Robotics Challenge (2018 & 2020) was designed to challenge teams to design systems that are easy to adapt to new tasks and to ensure robust operation in a semi-structured environment. We present a layered strategy to transform missions into tasks and actions and provide a set of strategies to address simple and complex failures. We propose a model for characterizing failures using this model and discuss repairs. Simple failures are by far the most common in our WRC system and we also present how we repaired them.
Pose Estimation of Specular and Symmetrical Objects
Oct 31, 2020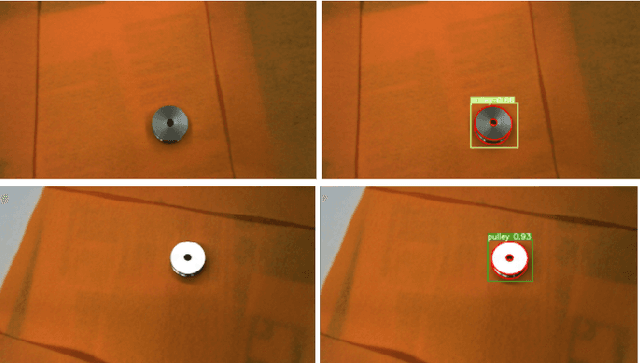
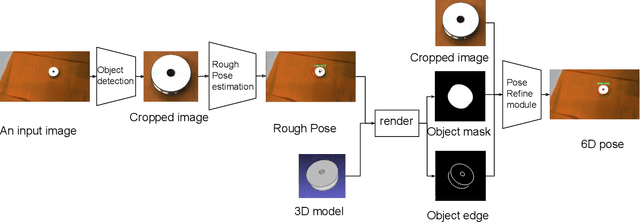
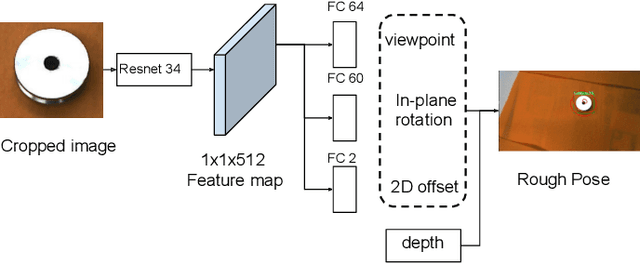
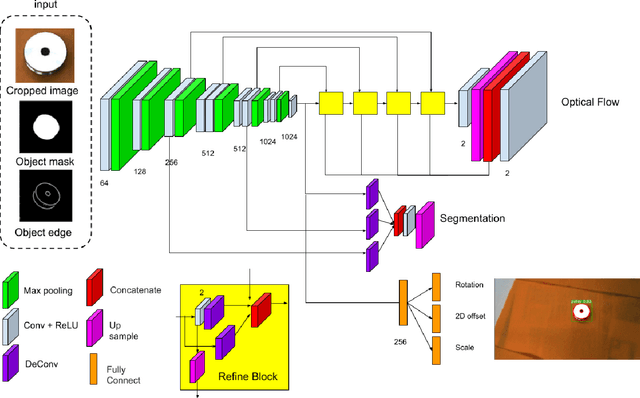
In the robotic industry, specular and textureless metallic components are ubiquitous. The 6D pose estimation of such objects with only a monocular RGB camera is difficult because of the absence of rich texture features. Furthermore, the appearance of specularity heavily depends on the camera viewpoint and environmental light conditions making traditional methods, like template matching, fail. In the last 30 years, pose estimation of the specular object has been a consistent challenge, and most related works require massive knowledge modeling effort for light setups, environment, or the object surface. On the other hand, recent works exhibit the feasibility of 6D pose estimation on a monocular camera with convolutional neural networks(CNNs) however they mostly use opaque objects for evaluation. This paper provides a data-driven solution to estimate the 6D pose of specular objects for grasping them, proposes a cost function for handling symmetry, and demonstrates experimental results showing the system's feasibility.
Predicting Algorithm Classes for Programming Word Problems
Apr 04, 2019
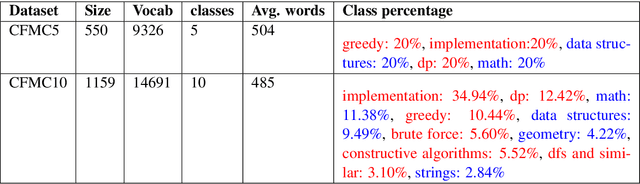

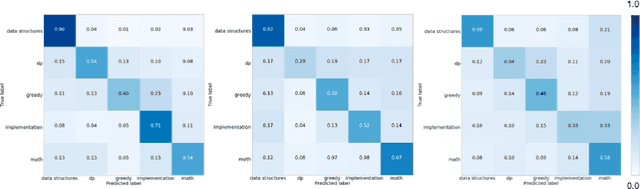
We introduce the task of algorithm class prediction for programming word problems. A programming word problem is a problem written in natural language, which can be solved using an algorithm or a program. We define classes of various programming word problems which correspond to the class of algorithms required to solve the problem. We present four new datasets for this task, two multiclass datasets with 550 and 1159 problems each and two multilabel datasets having 3737 and 3960 problems each. We pose the problem as a text classification problem and train neural network and non-neural network-based models on this task. Our best performing classifier gets an accuracy of 62.7 percent for the multiclass case on the five class classification dataset, Codeforces Multiclass-5 (CFMC5). We also do some human-level analysis and compare human performance with that of our text classification models. Our best classifier has an accuracy only 9 percent lower than that of a human on this task. To the best of our knowledge, these are the first reported results on such a task. We make our code and datasets publicly available.