 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Zero to Hero: Advancing Zero-Shot Foundation Models for Tabular Outlier Detection
Feb 03, 2026Outlier detection (OD) is widely used in practice; but its effective deployment on new tasks is hindered by lack of labeled outliers, which makes algorithm and hyperparameter selection notoriously hard. Foundation models (FMs) have transformed ML, and OD is no exception: Shen et. al. (2025) introduced FoMo-0D, the first FM for OD, achieving remarkable performance against numerous baselines. This work introduces OUTFORMER, which advances FoMo-0D with (1) a mixture of synthetic priors and (2) self-evolving curriculum training. OUTFORMER is pretrained solely on synthetic labeled datasets and infers test labels of a new task by using its training data as in-context input. Inference is fast and zero-shot, requiring merely forward pass and no labeled outliers. Thanks to in-context learning, it requires zero additional work-no OD model training or bespoke model selection-enabling truly plug-and-play deployment. OUTFORMER achieves state-of-the-art performance on the prominent AdBench, as well as two new large-scale OD benchmarks that we introduce, comprising over 1,500 datasets, while maintaining speedy inference.
FaST: Efficient and Effective Long-Horizon Forecasting for Large-Scale Spatial-Temporal Graphs via Mixture-of-Experts
Jan 08, 2026Spatial-Temporal Graph (STG) forecasting on large-scale networks has garnered significant attention. However, existing models predominantly focus on short-horizon predictions and suffer from notorious computational costs and memory consumption when scaling to long-horizon predictions and large graphs. Targeting the above challenges, we present FaST, an effective and efficient framework based on heterogeneity-aware Mixture-of-Experts (MoEs) for long-horizon and large-scale STG forecasting, which unlocks one-week-ahead (672 steps at a 15-minute granularity) prediction with thousands of nodes. FaST is underpinned by two key innovations. First, an adaptive graph agent attention mechanism is proposed to alleviate the computational burden inherent in conventional graph convolution and self-attention modules when applied to large-scale graphs. Second, we propose a new parallel MoE module that replaces traditional feed-forward networks with Gated Linear Units (GLUs), enabling an efficient and scalable parallel structure. Extensive experiments on real-world datasets demonstrate that FaST not only delivers superior long-horizon predictive accuracy but also achieves remarkable computational efficiency compared to state-of-the-art baselines. Our source code is available at: https://github.com/yijizhao/FaST.
TransferTraj: A Vehicle Trajectory Learning Model for Region and Task Transferability
May 19, 2025Vehicle GPS trajectories provide valuable movement information that supports various downstream tasks and applications. A desirable trajectory learning model should be able to transfer across regions and tasks without retraining, avoiding the need to maintain multiple specialized models and subpar performance with limited training data. However, each region has its unique spatial features and contexts, which are reflected in vehicle movement patterns and difficult to generalize. Additionally, transferring across different tasks faces technical challenges due to the varying input-output structures required for each task. Existing efforts towards transferability primarily involve learning embedding vectors for trajectories, which perform poorly in region transfer and require retraining of prediction modules for task transfer. To address these challenges, we propose TransferTraj, a vehicle GPS trajectory learning model that excels in both region and task transferability. For region transferability, we introduce RTTE as the main learnable module within TransferTraj. It integrates spatial, temporal, POI, and road network modalities of trajectories to effectively manage variations in spatial context distribution across regions. It also introduces a TRIE module for incorporating relative information of spatial features and a spatial context MoE module for handling movement patterns in diverse contexts. For task transferability, we propose a task-transferable input-output scheme that unifies the input-output structure of different tasks into the masking and recovery of modalities and trajectory points. This approach allows TransferTraj to be pre-trained once and transferred to different tasks without retraining. Extensive experiments on three real-world vehicle trajectory datasets under task transfer, zero-shot, and few-shot region transfer, validating TransferTraj's effectiveness.
MRGRP: Empowering Courier Route Prediction in Food Delivery Service with Multi-Relational Graph
May 17, 2025
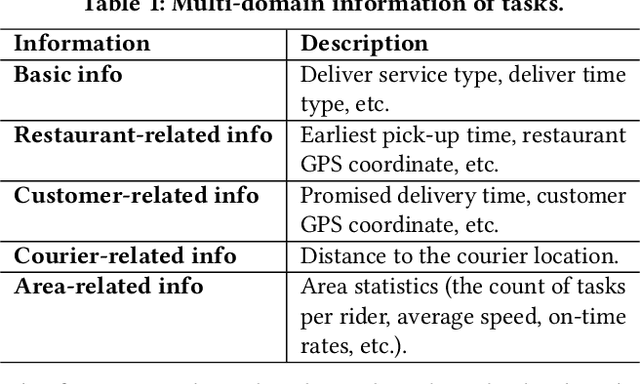
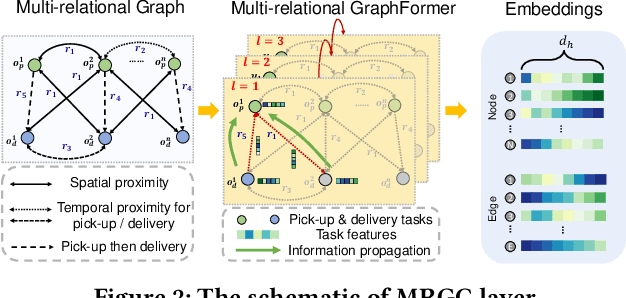
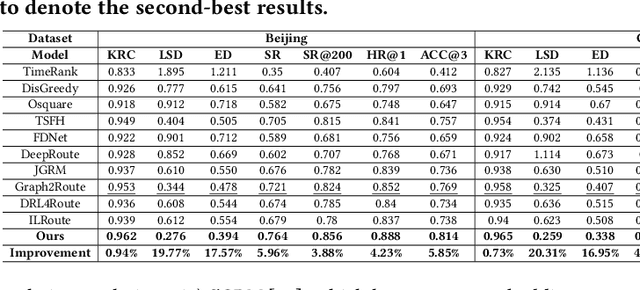
Instant food delivery has become one of the most popular web services worldwide due to its convenience in daily life. A fundamental challenge is accurately predicting courier routes to optimize task dispatch and improve delivery efficiency. This enhances satisfaction for couriers and users and increases platform profitability. The current heuristic prediction method uses only limited human-selected task features and ignores couriers preferences, causing suboptimal results. Additionally, existing learning-based methods do not fully capture the diverse factors influencing courier decisions or the complex relationships among them. To address this, we propose a Multi-Relational Graph-based Route Prediction (MRGRP) method that models fine-grained correlations among tasks affecting courier decisions for accurate prediction. We encode spatial and temporal proximity, along with pickup-delivery relationships, into a multi-relational graph and design a GraphFormer architecture to capture these complex connections. We also introduce a route decoder that leverages courier information and dynamic distance and time contexts for prediction, using existing route solutions as references to improve outcomes. Experiments show our model achieves state-of-the-art route prediction on offline data from cities of various sizes. Deployed on the Meituan Turing platform, it surpasses the current heuristic algorithm, reaching a high route prediction accuracy of 0.819, essential for courier and user satisfaction in instant food delivery.
T2S: High-resolution Time Series Generation with Text-to-Series Diffusion Models
May 05, 2025Text-to-Time Series generation holds significant potential to address challenges such as data sparsity, imbalance, and limited availability of multimodal time series datasets across domains. While diffusion models have achieved remarkable success in Text-to-X (e.g., vision and audio data) generation, their use in time series generation remains in its nascent stages. Existing approaches face two critical limitations: (1) the lack of systematic exploration of general-proposed time series captions, which are often domain-specific and struggle with generalization; and (2) the inability to generate time series of arbitrary lengths, limiting their applicability to real-world scenarios. In this work, we first categorize time series captions into three levels: point-level, fragment-level, and instance-level. Additionally, we introduce a new fragment-level dataset containing over 600,000 high-resolution time series-text pairs. Second, we propose Text-to-Series (T2S), a diffusion-based framework that bridges the gap between natural language and time series in a domain-agnostic manner. T2S employs a length-adaptive variational autoencoder to encode time series of varying lengths into consistent latent embeddings. On top of that, T2S effectively aligns textual representations with latent embeddings by utilizing Flow Matching and employing Diffusion Transformer as the denoiser. We train T2S in an interleaved paradigm across multiple lengths, allowing it to generate sequences of any desired length. Extensive evaluations demonstrate that T2S achieves state-of-the-art performance across 13 datasets spanning 12 domains.
Embracing Large Language Models in Traffic Flow Forecasting
Dec 15, 2024Traffic flow forecasting aims to predict future traffic flows based on the historical traffic conditions and the road network. It is an important problem in intelligent transportation systems, with a plethora of methods been proposed. Existing efforts mainly focus on capturing and utilizing spatio-temporal dependencies to predict future traffic flows. Though promising, they fall short in adapting to test-time environmental changes of traffic conditions. To tackle this challenge, we propose to introduce large language models (LLMs) to help traffic flow forecasting and design a novel method named Large Language Model Enhanced Traffic Flow Predictor (LEAF). LEAF adopts two branches, capturing different spatio-temporal relations using graph and hypergraph structures respectively. The two branches are first pre-trained individually, and during test-time, they yield different predictions. Based on these predictions, a large language model is used to select the most likely result. Then, a ranking loss is applied as the learning objective to enhance the prediction ability of the two branches. Extensive experiments on several datasets demonstrate the effectiveness of the proposed LEAF.
DRL4AOI: A DRL Framework for Semantic-aware AOI Segmentation in Location-Based Services
Dec 06, 2024



In Location-Based Services (LBS), such as food delivery, a fundamental task is segmenting Areas of Interest (AOIs), aiming at partitioning the urban geographical spaces into non-overlapping regions. Traditional AOI segmentation algorithms primarily rely on road networks to partition urban areas. While promising in modeling the geo-semantics, road network-based models overlooked the service-semantic goals (e.g., workload equality) in LBS service. In this paper, we point out that the AOI segmentation problem can be naturally formulated as a Markov Decision Process (MDP), which gradually chooses a nearby AOI for each grid in the current AOI's border. Based on the MDP, we present the first attempt to generalize Deep Reinforcement Learning (DRL) for AOI segmentation, leading to a novel DRL-based framework called DRL4AOI. The DRL4AOI framework introduces different service-semantic goals in a flexible way by treating them as rewards that guide the AOI generation. To evaluate the effectiveness of DRL4AOI, we develop and release an AOI segmentation system. We also present a representative implementation of DRL4AOI - TrajRL4AOI - for AOI segmentation in the logistics service. It introduces a Double Deep Q-learning Network (DDQN) to gradually optimize the AOI generation for two specific semantic goals: i) trajectory modularity, i.e., maximize tightness of the trajectory connections within an AOI and the sparsity of connections between AOIs, ii) matchness with the road network, i.e., maximizing the matchness between AOIs and the road network. Quantitative and qualitative experiments conducted on synthetic and real-world data demonstrate the effectiveness and superiority of our method. The code and system is publicly available at https://github.com/Kogler7/AoiOpt.
Uncertainty-aware Human Mobility Modeling and Anomaly Detection
Oct 02, 2024Given the GPS coordinates of a large collection of human agents over time, how can we model their mobility behavior toward effective anomaly detection (e.g. for bad-actor or malicious behavior detection) without any labeled data? Human mobility and trajectory modeling have been studied extensively with varying capacity to handle complex input, and performance-efficiency trade-offs. With the arrival of more expressive models in machine learning, we attempt to model GPS data as a sequence of stay-point events, each with a set of characterizing spatiotemporal features, and leverage modern sequence models such as Transformers for un/self-supervised training and inference. Notably, driven by the inherent stochasticity of certain individuals' behavior, we equip our model with aleatoric/data uncertainty estimation. In addition, to handle data sparsity of a large variety of behaviors, we incorporate epistemic/model uncertainty into our model. Together, aleatoric and epistemic uncertainty enable a robust loss and training dynamics, as well as uncertainty-aware decision making in anomaly scoring. Experiments on large expert-simulated datasets with tens of thousands of agents demonstrate the effectiveness of our model against both forecasting and anomaly detection baselines.
Zero-shot Outlier Detection via Prior-data Fitted Networks: Model Selection Bygone!
Sep 09, 2024Outlier detection (OD) has a vast literature as it finds numerous applications in environmental monitoring, cybersecurity, finance, and medicine to name a few. Being an inherently unsupervised task, model selection is a key bottleneck for OD (both algorithm and hyperparameter selection) without label supervision. There is a long list of techniques to choose from -- both classical algorithms and deep neural architectures -- and while several studies report their hyperparameter sensitivity, the literature is quite slim on unsupervised model selection -- limiting the effective use of OD in practice. In this paper we present FoMo-0D, for zero/0-shot OD exploring a transformative new direction that bypasses the hurdle of model selection altogether (!), thus breaking new ground. The fundamental idea behind FoMo-0D is the Prior-data Fitted Networks, recently introduced by Muller et al.(2022), which trains a Transformer model on a large body of synthetically generated data from a prior data distribution. In essence, FoMo-0D is a pretrained Foundation Model for zero/0-shot OD on tabular data, which can directly predict the (outlier/inlier) label of any test data at inference time, by merely a single forward pass -- making obsolete the need for choosing an algorithm/architecture, tuning its associated hyperparameters, and even training any model parameters when given a new OD dataset. Extensive experiments on 57 public benchmark datasets against 26 baseline methods show that FoMo-0D performs statistically no different from the top 2nd baseline, while significantly outperforming the majority of the baselines, with an average inference time of 7.7 ms per test sample.
DutyTTE: Deciphering Uncertainty in Origin-Destination Travel Time Estimation
Aug 23, 2024Uncertainty quantification in travel time estimation (TTE) aims to estimate the confidence interval for travel time, given the origin (O), destination (D), and departure time (T). Accurately quantifying this uncertainty requires generating the most likely path and assessing travel time uncertainty along the path. This involves two main challenges: 1) Predicting a path that aligns with the ground truth, and 2) modeling the impact of travel time in each segment on overall uncertainty under varying conditions. We propose DutyTTE to address these challenges. For the first challenge, we introduce a deep reinforcement learning method to improve alignment between the predicted path and the ground truth, providing more accurate travel time information from road segments to improve TTE. For the second challenge, we propose a mixture of experts guided uncertainty quantification mechanism to better capture travel time uncertainty for each segment under varying contexts. Additionally, we calibrate our results using Hoeffding's upper-confidence bound to provide statistical guarantees for the estimated confidence intervals. Extensive experiments on two real-world datasets demonstrate the superiority of our proposed method.