 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePLM4Traj: Cognizing Movement Patterns and Travel Purposes from Trajectories with Pre-trained Language Models
Paper and Code
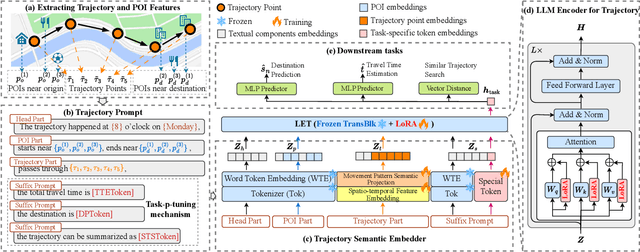
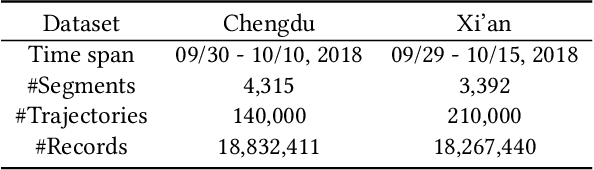
Spatio-temporal trajectories play a vital role in various spatio-temporal data mining tasks. Developing a versatile trajectory learning approach that can adapt to different tasks while ensuring high accuracy is crucial. This requires effectively extracting movement patterns and travel purposes embedded in trajectories. However, this task is challenging due to limitations in the size and quality of available trajectory datasets. On the other hand, pre-trained language models (PLMs) have shown great success in adapting to different tasks by training on large-scale, high-quality corpus datasets. Given the similarities between trajectories and sentences, there is potential in leveraging PLMs to enhance the development of a versatile and effective trajectory learning method. Nevertheless, vanilla PLMs are not tailored to handle the unique spatio-temporal features present in trajectories and lack the capability to extract movement patterns and travel purposes from them. To overcome these obstacles, we propose a model called PLM4Traj that effectively utilizes PLMs to model trajectories. PLM4Traj leverages the strengths of PLMs to create a versatile trajectory learning approach while addressing the limitations of vanilla PLMs in modeling trajectories. Firstly, PLM4Traj incorporates a novel trajectory semantic embedder that enables PLMs to process spatio-temporal features in trajectories and extract movement patterns and travel purposes from them. Secondly, PLM4Traj introduces a novel trajectory prompt that integrates movement patterns and travel purposes into PLMs, while also allowing the model to adapt to various tasks. Extensive experiments conducted on two real-world datasets and two representative tasks demonstrate that PLM4Traj successfully achieves its design goals. Codes are available at https://github.com/Zeru19/PLM4Traj.