 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatial-Temporal Feedback Diffusion Guidance for Controlled Traffic Imputation
Jan 08, 2026Imputing missing values in spatial-temporal traffic data is essential for intelligent transportation systems. Among advanced imputation methods, score-based diffusion models have demonstrated competitive performance. These models generate data by reversing a noising process, using observed values as conditional guidance. However, existing diffusion models typically apply a uniform guidance scale across both spatial and temporal dimensions, which is inadequate for nodes with high missing data rates. Sparse observations provide insufficient conditional guidance, causing the generative process to drift toward the learned prior distribution rather than closely following the conditional observations, resulting in suboptimal imputation performance. To address this, we propose FENCE, a spatial-temporal feedback diffusion guidance method designed to adaptively control guidance scales during imputation. First, FENCE introduces a dynamic feedback mechanism that adjusts the guidance scale based on the posterior likelihood approximations. The guidance scale is increased when generated values diverge from observations and reduced when alignment improves, preventing overcorrection. Second, because alignment to observations varies across nodes and denoising steps, a global guidance scale for all nodes is suboptimal. FENCE computes guidance scales at the cluster level by grouping nodes based on their attention scores, leveraging spatial-temporal correlations to provide more accurate guidance. Experimental results on real-world traffic datasets show that FENCE significantly enhances imputation accuracy.
RIPCN: A Road Impedance Principal Component Network for Probabilistic Traffic Flow Forecasting
Dec 25, 2025Accurate traffic flow forecasting is crucial for intelligent transportation services such as navigation and ride-hailing. In such applications, uncertainty estimation in forecasting is important because it helps evaluate traffic risk levels, assess forecast reliability, and provide timely warnings. As a result, probabilistic traffic flow forecasting (PTFF) has gained significant attention, as it produces both point forecasts and uncertainty estimates. However, existing PTFF approaches still face two key challenges: (1) how to uncover and model the causes of traffic flow uncertainty for reliable forecasting, and (2) how to capture the spatiotemporal correlations of uncertainty for accurate prediction. To address these challenges, we propose RIPCN, a Road Impedance Principal Component Network that integrates domain-specific transportation theory with spatiotemporal principal component learning for PTFF. RIPCN introduces a dynamic impedance evolution network that captures directional traffic transfer patterns driven by road congestion level and flow variability, revealing the direct causes of uncertainty and enhancing both reliability and interpretability. In addition, a principal component network is designed to forecast the dominant eigenvectors of future flow covariance, enabling the model to capture spatiotemporal uncertainty correlations. This design allows for accurate and efficient uncertainty estimation while also improving point prediction performance. Experimental results on real-world datasets show that our approach outperforms existing probabilistic forecasting methods.
TransferTraj: A Vehicle Trajectory Learning Model for Region and Task Transferability
May 19, 2025Vehicle GPS trajectories provide valuable movement information that supports various downstream tasks and applications. A desirable trajectory learning model should be able to transfer across regions and tasks without retraining, avoiding the need to maintain multiple specialized models and subpar performance with limited training data. However, each region has its unique spatial features and contexts, which are reflected in vehicle movement patterns and difficult to generalize. Additionally, transferring across different tasks faces technical challenges due to the varying input-output structures required for each task. Existing efforts towards transferability primarily involve learning embedding vectors for trajectories, which perform poorly in region transfer and require retraining of prediction modules for task transfer. To address these challenges, we propose TransferTraj, a vehicle GPS trajectory learning model that excels in both region and task transferability. For region transferability, we introduce RTTE as the main learnable module within TransferTraj. It integrates spatial, temporal, POI, and road network modalities of trajectories to effectively manage variations in spatial context distribution across regions. It also introduces a TRIE module for incorporating relative information of spatial features and a spatial context MoE module for handling movement patterns in diverse contexts. For task transferability, we propose a task-transferable input-output scheme that unifies the input-output structure of different tasks into the masking and recovery of modalities and trajectory points. This approach allows TransferTraj to be pre-trained once and transferred to different tasks without retraining. Extensive experiments on three real-world vehicle trajectory datasets under task transfer, zero-shot, and few-shot region transfer, validating TransferTraj's effectiveness.
Towards An Efficient and Effective En Route Travel Time Estimation Framework
Apr 05, 2025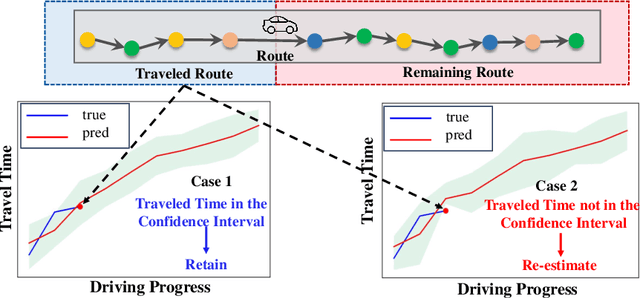

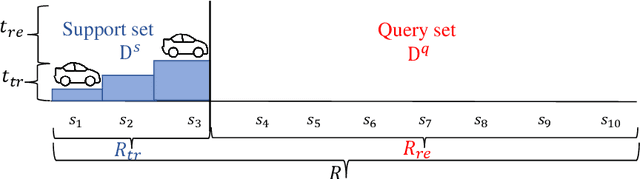

En route travel time estimation (ER-TTE) focuses on predicting the travel time of the remaining route. Existing ER-TTE methods always make re-estimation which significantly hinders real-time performance, especially when faced with the computational demands of simultaneous user requests. This results in delays and reduced responsiveness in ER-TTE services. We propose a general efficient framework U-ERTTE combining an Uncertainty-Guided Decision mechanism (UGD) and Fine-Tuning with Meta-Learning (FTML) to address these challenges. UGD quantifies the uncertainty and provides confidence intervals for the entire route. It selectively re-estimates only when the actual travel time deviates from the predicted confidence intervals, thereby optimizing the efficiency of ER-TTE. To ensure the accuracy of confidence intervals and accurate predictions that need to re-estimate, FTML is employed to train the model, enabling it to learn general driving patterns and specific features to adapt to specific tasks. Extensive experiments on two large-scale real datasets demonstrate that the U-ERTTE framework significantly enhances inference speed and throughput while maintaining high effectiveness. Our code is available at https://github.com/shenzekai/U-ERTTE
An Experimental Evaluation of Imputation Models for Spatial-Temporal Traffic Data
Dec 06, 2024



Traffic data imputation is a critical preprocessing step in intelligent transportation systems, enabling advanced transportation services. Despite significant advancements in this field, selecting the most suitable model for practical applications remains challenging due to three key issues: 1) incomprehensive consideration of missing patterns that describe how data loss along spatial and temporal dimensions, 2) the lack of test on standardized datasets, and 3) insufficient evaluations. To this end, we first propose practice-oriented taxonomies for missing patterns and imputation models, systematically identifying all possible forms of real-world traffic data loss and analyzing the characteristics of existing models. Furthermore, we introduce a unified benchmarking pipeline to comprehensively evaluate 10 representative models across various missing patterns and rates. This work aims to provide a holistic understanding of traffic data imputation research and serve as a practical guideline.
DiffLight: A Partial Rewards Conditioned Diffusion Model for Traffic Signal Control with Missing Data
Oct 31, 2024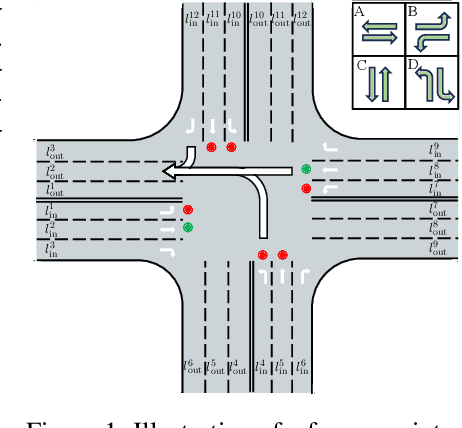
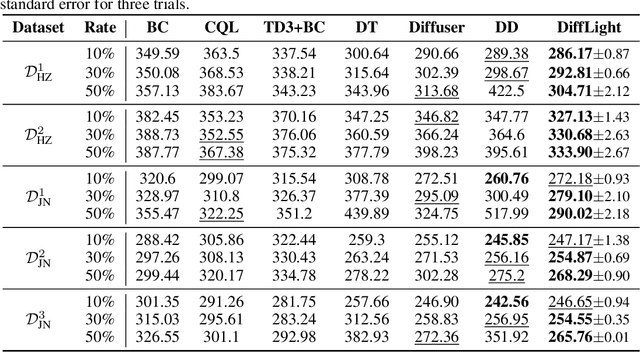
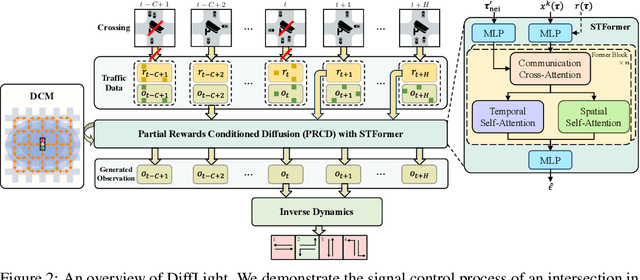
The application of reinforcement learning in traffic signal control (TSC) has been extensively researched and yielded notable achievements. However, most existing works for TSC assume that traffic data from all surrounding intersections is fully and continuously available through sensors. In real-world applications, this assumption often fails due to sensor malfunctions or data loss, making TSC with missing data a critical challenge. To meet the needs of practical applications, we introduce DiffLight, a novel conditional diffusion model for TSC under data-missing scenarios in the offline setting. Specifically, we integrate two essential sub-tasks, i.e., traffic data imputation and decision-making, by leveraging a Partial Rewards Conditioned Diffusion (PRCD) model to prevent missing rewards from interfering with the learning process. Meanwhile, to effectively capture the spatial-temporal dependencies among intersections, we design a Spatial-Temporal transFormer (STFormer) architecture. In addition, we propose a Diffusion Communication Mechanism (DCM) to promote better communication and control performance under data-missing scenarios. Extensive experiments on five datasets with various data-missing scenarios demonstrate that DiffLight is an effective controller to address TSC with missing data. The code of DiffLight is released at https://github.com/lokol5579/DiffLight-release.
Mobility-LLM: Learning Visiting Intentions and Travel Preferences from Human Mobility Data with Large Language Models
Oct 29, 2024



Location-based services (LBS) have accumulated extensive human mobility data on diverse behaviors through check-in sequences. These sequences offer valuable insights into users' intentions and preferences. Yet, existing models analyzing check-in sequences fail to consider the semantics contained in these sequences, which closely reflect human visiting intentions and travel preferences, leading to an incomplete comprehension. Drawing inspiration from the exceptional semantic understanding and contextual information processing capabilities of large language models (LLMs) across various domains, we present Mobility-LLM, a novel framework that leverages LLMs to analyze check-in sequences for multiple tasks. Since LLMs cannot directly interpret check-ins, we reprogram these sequences to help LLMs comprehensively understand the semantics of human visiting intentions and travel preferences. Specifically, we introduce a visiting intention memory network (VIMN) to capture the visiting intentions at each record, along with a shared pool of human travel preference prompts (HTPP) to guide the LLM in understanding users' travel preferences. These components enhance the model's ability to extract and leverage semantic information from human mobility data effectively. Extensive experiments on four benchmark datasets and three downstream tasks demonstrate that our approach significantly outperforms existing models, underscoring the effectiveness of Mobility-LLM in advancing our understanding of human mobility data within LBS contexts.
PTR: A Pre-trained Language Model for Trajectory Recovery
Oct 18, 2024



Spatiotemporal trajectory data is vital for web-of-things services and is extensively collected and analyzed by web-based hardware and platforms. However, issues such as service interruptions and network instability often lead to sparsely recorded trajectories, resulting in a loss of detailed movement data. As a result, recovering these trajectories to restore missing information becomes essential. Despite progress, several challenges remain unresolved. First, the lack of large-scale dense trajectory data hampers the performance of existing deep learning methods, which rely heavily on abundant data for supervised training. Second, current methods struggle to generalize across sparse trajectories with varying sampling intervals, necessitating separate re-training for each interval and increasing computational costs. Third, external factors crucial for the recovery of missing points are not fully incorporated. To address these challenges, we propose a framework called PTR. This framework mitigates the issue of limited dense trajectory data by leveraging the capabilities of pre-trained language models (PLMs). PTR incorporates an explicit trajectory prompt and is trained on datasets with multiple sampling intervals, enabling it to generalize effectively across different intervals in sparse trajectories. To capture external factors, we introduce an implicit trajectory prompt that models road conditions, providing richer information for recovering missing points. Additionally, we present a trajectory embedder that encodes trajectory points and transforms the embeddings of both observed and missing points into a format comprehensible to PLMs. Experimental results on two public trajectory datasets with three sampling intervals demonstrate the efficacy and scalability of PTR.
DutyTTE: Deciphering Uncertainty in Origin-Destination Travel Time Estimation
Aug 23, 2024Uncertainty quantification in travel time estimation (TTE) aims to estimate the confidence interval for travel time, given the origin (O), destination (D), and departure time (T). Accurately quantifying this uncertainty requires generating the most likely path and assessing travel time uncertainty along the path. This involves two main challenges: 1) Predicting a path that aligns with the ground truth, and 2) modeling the impact of travel time in each segment on overall uncertainty under varying conditions. We propose DutyTTE to address these challenges. For the first challenge, we introduce a deep reinforcement learning method to improve alignment between the predicted path and the ground truth, providing more accurate travel time information from road segments to improve TTE. For the second challenge, we propose a mixture of experts guided uncertainty quantification mechanism to better capture travel time uncertainty for each segment under varying contexts. Additionally, we calibrate our results using Hoeffding's upper-confidence bound to provide statistical guarantees for the estimated confidence intervals. Extensive experiments on two real-world datasets demonstrate the superiority of our proposed method.
PTrajM: Efficient and Semantic-rich Trajectory Learning with Pretrained Trajectory-Mamba
Aug 09, 2024



Vehicle trajectories provide crucial movement information for various real-world applications. To better utilize vehicle trajectories, it is essential to develop a trajectory learning approach that can effectively and efficiently extract rich semantic information, including movement behavior and travel purposes, to support accurate downstream applications. However, creating such an approach presents two significant challenges. First, movement behavior are inherently spatio-temporally continuous, making them difficult to extract efficiently from irregular and discrete trajectory points. Second, travel purposes are related to the functionalities of areas and road segments traversed by vehicles. These functionalities are not available from the raw spatio-temporal trajectory features and are hard to extract directly from complex textual features associated with these areas and road segments. To address these challenges, we propose PTrajM, a novel method capable of efficient and semantic-rich vehicle trajectory learning. To support efficient modeling of movement behavior, we introduce Trajectory-Mamba as the learnable model of PTrajM, which effectively extracts continuous movement behavior while being more computationally efficient than existing structures. To facilitate efficient extraction of travel purposes, we propose a travel purpose-aware pre-training procedure, which enables PTrajM to discern the travel purposes of trajectories without additional computational resources during its embedding process. Extensive experiments on two real-world datasets and comparisons with several state-of-the-art trajectory learning methods demonstrate the effectiveness of PTrajM. Code is available at https://anonymous.4open.science/r/PTrajM-C973.