 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Twin AI: Opportunities and Challenges from Large Language Models to World Models
Jan 04, 2026Digital twins, as precise digital representations of physical systems, have evolved from passive simulation tools into intelligent and autonomous entities through the integration of artificial intelligence technologies. This paper presents a unified four-stage framework that systematically characterizes AI integration across the digital twin lifecycle, spanning modeling, mirroring, intervention, and autonomous management. By synthesizing existing technologies and practices, we distill a unified four-stage framework that systematically characterizes how AI methodologies are embedded across the digital twin lifecycle: (1) modeling the physical twin through physics-based and physics-informed AI approaches, (2) mirroring the physical system into a digital twin with real-time synchronization, (3) intervening in the physical twin through predictive modeling, anomaly detection, and optimization strategies, and (4) achieving autonomous management through large language models, foundation models, and intelligent agents. We analyze the synergy between physics-based modeling and data-driven learning, highlighting the shift from traditional numerical solvers to physics-informed and foundation models for physical systems. Furthermore, we examine how generative AI technologies, including large language models and generative world models, transform digital twins into proactive and self-improving cognitive systems capable of reasoning, communication, and creative scenario generation. Through a cross-domain review spanning eleven application domains, including healthcare, aerospace, smart manufacturing, robotics, and smart cities, we identify common challenges related to scalability, explainability, and trustworthiness, and outline directions for responsible AI-driven digital twin systems.
Multi-Rigid-Body Approximation of Human Hands with Application to Digital Twin
Dec 08, 2025Human hand simulation plays a critical role in digital twin applications, requiring models that balance anatomical fidelity with computational efficiency. We present a complete pipeline for constructing multi-rigid-body approximations of human hands that preserve realistic appearance while enabling real-time physics simulation. Starting from optical motion capture of a specific human hand, we construct a personalized MANO (Multi-Abstracted hand model with Neural Operations) model and convert it to a URDF (Unified Robot Description Format) representation with anatomically consistent joint axes. The key technical challenge is projecting MANO's unconstrained SO(3) joint rotations onto the kinematically constrained joints of the rigid-body model. We derive closed-form solutions for single degree-of-freedom joints and introduce a Baker-Campbell-Hausdorff (BCH)-corrected iterative method for two degree-of-freedom joints that properly handles the non-commutativity of rotations. We validate our approach through digital twin experiments where reinforcement learning policies control the multi-rigid-body hand to replay captured human demonstrations. Quantitative evaluation shows sub-centimeter reconstruction error and successful grasp execution across diverse manipulation tasks.
Empowering Clinical Trial Design through AI: A Randomized Evaluation of PowerGPT
Sep 15, 2025



Sample size calculations for power analysis are critical for clinical research and trial design, yet their complexity and reliance on statistical expertise create barriers for many researchers. We introduce PowerGPT, an AI-powered system integrating large language models (LLMs) with statistical engines to automate test selection and sample size estimation in trial design. In a randomized trial to evaluate its effectiveness, PowerGPT significantly improved task completion rates (99.3% vs. 88.9% for test selection, 99.3% vs. 77.8% for sample size calculation) and accuracy (94.1% vs. 55.4% in sample size estimation, p < 0.001), while reducing average completion time (4.0 vs. 9.3 minutes, p < 0.001). These gains were consistent across various statistical tests and benefited both statisticians and non-statisticians as well as bridging expertise gaps. Already under deployment across multiple institutions, PowerGPT represents a scalable AI-driven approach that enhances accessibility, efficiency, and accuracy in statistical power analysis for clinical research.
Automated Sentiment Classification and Topic Discovery in Large-Scale Social Media Streams
May 03, 2025We present a framework for large-scale sentiment and topic analysis of Twitter discourse. Our pipeline begins with targeted data collection using conflict-specific keywords, followed by automated sentiment labeling via multiple pre-trained models to improve annotation robustness. We examine the relationship between sentiment and contextual features such as timestamp, geolocation, and lexical content. To identify latent themes, we apply Latent Dirichlet Allocation (LDA) on partitioned subsets grouped by sentiment and metadata attributes. Finally, we develop an interactive visualization interface to support exploration of sentiment trends and topic distributions across time and regions. This work contributes a scalable methodology for social media analysis in dynamic geopolitical contexts.
Mobility-LLM: Learning Visiting Intentions and Travel Preferences from Human Mobility Data with Large Language Models
Oct 29, 2024



Location-based services (LBS) have accumulated extensive human mobility data on diverse behaviors through check-in sequences. These sequences offer valuable insights into users' intentions and preferences. Yet, existing models analyzing check-in sequences fail to consider the semantics contained in these sequences, which closely reflect human visiting intentions and travel preferences, leading to an incomplete comprehension. Drawing inspiration from the exceptional semantic understanding and contextual information processing capabilities of large language models (LLMs) across various domains, we present Mobility-LLM, a novel framework that leverages LLMs to analyze check-in sequences for multiple tasks. Since LLMs cannot directly interpret check-ins, we reprogram these sequences to help LLMs comprehensively understand the semantics of human visiting intentions and travel preferences. Specifically, we introduce a visiting intention memory network (VIMN) to capture the visiting intentions at each record, along with a shared pool of human travel preference prompts (HTPP) to guide the LLM in understanding users' travel preferences. These components enhance the model's ability to extract and leverage semantic information from human mobility data effectively. Extensive experiments on four benchmark datasets and three downstream tasks demonstrate that our approach significantly outperforms existing models, underscoring the effectiveness of Mobility-LLM in advancing our understanding of human mobility data within LBS contexts.
Zodiac: A Cardiologist-Level LLM Framework for Multi-Agent Diagnostics
Oct 02, 2024Large language models (LLMs) have demonstrated remarkable progress in healthcare. However, a significant gap remains regarding LLMs' professionalism in domain-specific clinical practices, limiting their application in real-world diagnostics. In this work, we introduce ZODIAC, an LLM-powered framework with cardiologist-level professionalism designed to engage LLMs in cardiological diagnostics. ZODIAC assists cardiologists by extracting clinically relevant characteristics from patient data, detecting significant arrhythmias, and generating preliminary reports for the review and refinement by cardiologists. To achieve cardiologist-level professionalism, ZODIAC is built on a multi-agent collaboration framework, enabling the processing of patient data across multiple modalities. Each LLM agent is fine-tuned using real-world patient data adjudicated by cardiologists, reinforcing the model's professionalism. ZODIAC undergoes rigorous clinical validation with independent cardiologists, evaluated across eight metrics that measure clinical effectiveness and address security concerns. Results show that ZODIAC outperforms industry-leading models, including OpenAI's GPT-4o, Meta's Llama-3.1-405B, and Google's Gemini-pro, as well as medical-specialist LLMs like Microsoft's BioGPT. ZODIAC demonstrates the transformative potential of specialized LLMs in healthcare by delivering domain-specific solutions that meet the stringent demands of medical practice. Notably, ZODIAC has been successfully integrated into electrocardiography (ECG) devices, exemplifying the growing trend of embedding LLMs into Software-as-Medical-Device (SaMD).
From Basic to Extra Features: Hypergraph Transformer Pretrain-then-Finetuning for Balanced Clinical Predictions on EHR
Jun 09, 2024Electronic Health Records (EHRs) contain rich patient information and are crucial for clinical research and practice. In recent years, deep learning models have been applied to EHRs, but they often rely on massive features, which may not be readily available for all patients. We propose HTP-Star, which leverages hypergraph structures with a pretrain-then-finetune framework for modeling EHR data, enabling seamless integration of additional features. Additionally, we design two techniques, namely (1) Smoothness-inducing Regularization and (2) Group-balanced Reweighting, to enhance the model's robustness during fine-tuning. Through experiments conducted on two real EHR datasets, we demonstrate that HTP-Star consistently outperforms various baselines while striking a balance between patients with basic and extra features.
FlashSpeech: Efficient Zero-Shot Speech Synthesis
Apr 25, 2024



Recent progress in large-scale zero-shot speech synthesis has been significantly advanced by language models and diffusion models. However, the generation process of both methods is slow and computationally intensive. Efficient speech synthesis using a lower computing budget to achieve quality on par with previous work remains a significant challenge. In this paper, we present FlashSpeech, a large-scale zero-shot speech synthesis system with approximately 5\% of the inference time compared with previous work. FlashSpeech is built on the latent consistency model and applies a novel adversarial consistency training approach that can train from scratch without the need for a pre-trained diffusion model as the teacher. Furthermore, a new prosody generator module enhances the diversity of prosody, making the rhythm of the speech sound more natural. The generation processes of FlashSpeech can be achieved efficiently with one or two sampling steps while maintaining high audio quality and high similarity to the audio prompt for zero-shot speech generation. Our experimental results demonstrate the superior performance of FlashSpeech. Notably, FlashSpeech can be about 20 times faster than other zero-shot speech synthesis systems while maintaining comparable performance in terms of voice quality and similarity. Furthermore, FlashSpeech demonstrates its versatility by efficiently performing tasks like voice conversion, speech editing, and diverse speech sampling. Audio samples can be found in https://flashspeech.github.io/.
CoMoSVC: Consistency Model-based Singing Voice Conversion
Jan 03, 2024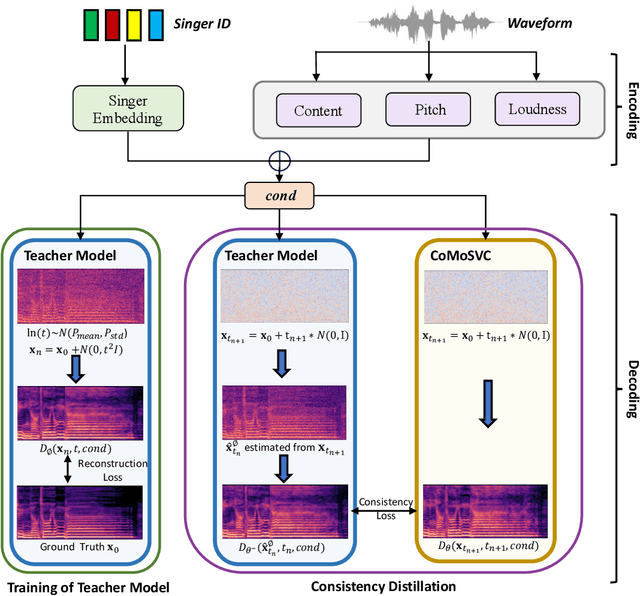



The diffusion-based Singing Voice Conversion (SVC) methods have achieved remarkable performances, producing natural audios with high similarity to the target timbre. However, the iterative sampling process results in slow inference speed, and acceleration thus becomes crucial. In this paper, we propose CoMoSVC, a consistency model-based SVC method, which aims to achieve both high-quality generation and high-speed sampling. A diffusion-based teacher model is first specially designed for SVC, and a student model is further distilled under self-consistency properties to achieve one-step sampling. Experiments on a single NVIDIA GTX4090 GPU reveal that although CoMoSVC has a significantly faster inference speed than the state-of-the-art (SOTA) diffusion-based SVC system, it still achieves comparable or superior conversion performance based on both subjective and objective metrics. Audio samples and codes are available at https://comosvc.github.io/.
Bridging the Gaps: Learning Verifiable Model-Free Quadratic Programming Controllers Inspired by Model Predictive Control
Dec 26, 2023



In this paper, we introduce a new class of parameterized controllers, drawing inspiration from Model Predictive Control (MPC). The controller resembles a Quadratic Programming (QP) solver of a linear MPC problem, with the parameters of the controller being trained via Deep Reinforcement Learning (DRL) rather than derived from system models. This approach addresses the limitations of common controllers with Multi-Layer Perceptron (MLP) or other general neural network architecture used in DRL, in terms of verifiability and performance guarantees, and the learned controllers possess verifiable properties like persistent feasibility and asymptotic stability akin to MPC. On the other hand, numerical examples illustrate that the proposed controller empirically matches MPC and MLP controllers in terms of control performance and has superior robustness against modeling uncertainty and noises. Furthermore, the proposed controller is significantly more computationally efficient compared to MPC and requires fewer parameters to learn than MLP controllers. Real-world experiments on vehicle drift maneuvering task demonstrate the potential of these controllers for robotics and other demanding control tasks.