 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResidual Dense Swin Transformer for Continuous Depth-Independent Ultrasound Imaging
Mar 25, 2024Ultrasound imaging is crucial for evaluating organ morphology and function, yet depth adjustment can degrade image quality and field-of-view, presenting a depth-dependent dilemma. Traditional interpolation-based zoom-in techniques often sacrifice detail and introduce artifacts. Motivated by the potential of arbitrary-scale super-resolution to naturally address these inherent challenges, we present the Residual Dense Swin Transformer Network (RDSTN), designed to capture the non-local characteristics and long-range dependencies intrinsic to ultrasound images. It comprises a linear embedding module for feature enhancement, an encoder with shifted-window attention for modeling non-locality, and an MLP decoder for continuous detail reconstruction. This strategy streamlines balancing image quality and field-of-view, which offers superior textures over traditional methods. Experimentally, RDSTN outperforms existing approaches while requiring fewer parameters. In conclusion, RDSTN shows promising potential for ultrasound image enhancement by overcoming the limitations of conventional interpolation-based methods and achieving depth-independent imaging.
* Accepted by ICASSP2024, https://ieeexplore.ieee.org/document/10447712
Bridging the Gaps: Learning Verifiable Model-Free Quadratic Programming Controllers Inspired by Model Predictive Control
Dec 26, 2023



In this paper, we introduce a new class of parameterized controllers, drawing inspiration from Model Predictive Control (MPC). The controller resembles a Quadratic Programming (QP) solver of a linear MPC problem, with the parameters of the controller being trained via Deep Reinforcement Learning (DRL) rather than derived from system models. This approach addresses the limitations of common controllers with Multi-Layer Perceptron (MLP) or other general neural network architecture used in DRL, in terms of verifiability and performance guarantees, and the learned controllers possess verifiable properties like persistent feasibility and asymptotic stability akin to MPC. On the other hand, numerical examples illustrate that the proposed controller empirically matches MPC and MLP controllers in terms of control performance and has superior robustness against modeling uncertainty and noises. Furthermore, the proposed controller is significantly more computationally efficient compared to MPC and requires fewer parameters to learn than MLP controllers. Real-world experiments on vehicle drift maneuvering task demonstrate the potential of these controllers for robotics and other demanding control tasks.
Aggressive Racecar Drifting Control Using Onboard Cameras and Inertial Measurement Unit
Feb 28, 2022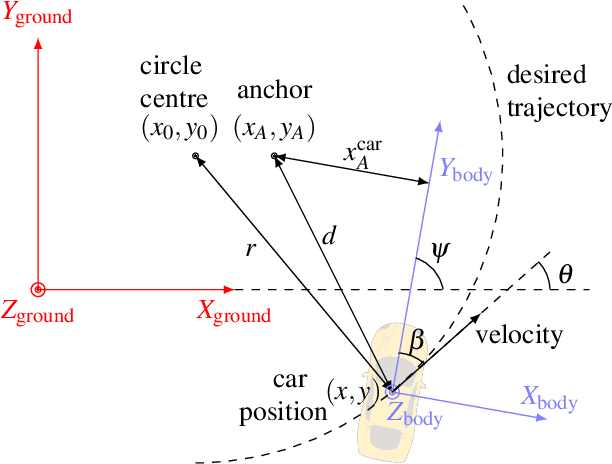
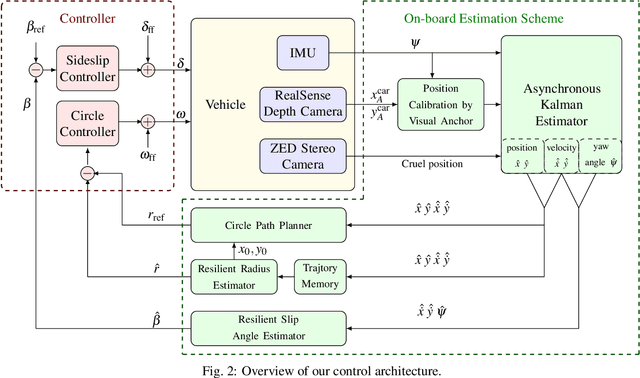
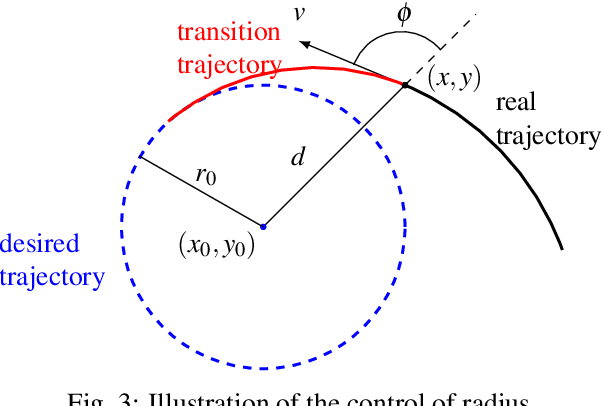
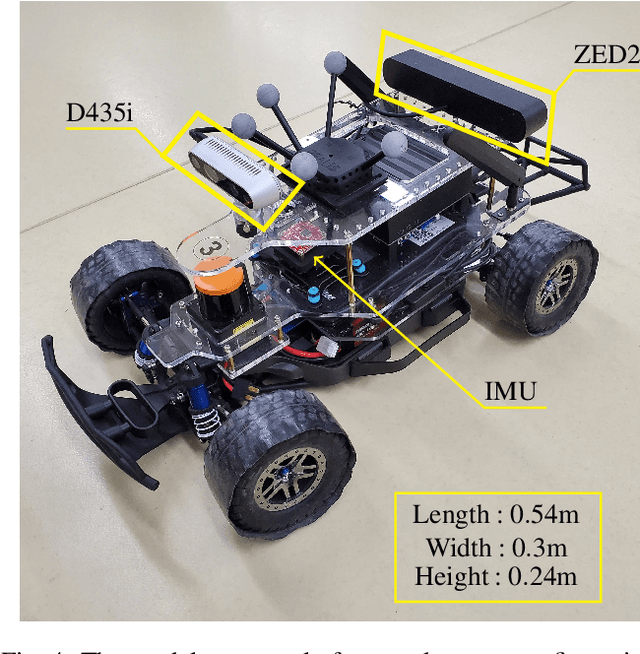
Complex autonomous driving, such as drifting, requires high-precision and high-frequency pose information to ensure accuracy and safety, which is notably difficult when using only onboard sensors. In this paper, we propose a drift controller with two feedback control loops: sideslip controller that stabilizes the sideslip angle by tuning the front wheel steering angle, and circle controller that maintains a stable trajectory radius and circle center by controlling the wheel rotational speed. We use an extended Kalman filter to estimate the state. A robustified KASA algorithm is further proposed to accurately estimate the parameters of the circle (i.e., the center and radius) that best fits into the current trajectory. On the premise of the uniform circular motion of the vehicle in the process of stable drift, we use angle information instead of acceleration to describe the dynamic of the vehicle. We implement our method on a 1/10 scale race car. The car drifts stably with a given center and radius, which illustrates the effectiveness of our method.