 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZoom In, Reason Out: Efficient Far-field Anomaly Detection in Expressway Surveillance Videos via Focused VLM Reasoning Guided by Bayesian Inference
Apr 28, 2026Expressway video anomaly detection is essential for safety management. However, identifying anomalies across diverse scenes remains challenging, particularly for far-field targets exhibiting subtle abnormal vehicle motions. While Vision-Language Models (VLMs) demonstrate strong semantic reasoning capabilities, processing global frames causes attention dilution for these far-field objects and incurs prohibitive computational costs. To address these issues, we propose VIBES, an asynchronous collaborative framework utilizing VLMs guided by Bayesian inference. Specifically, to overcome poor generalization across varying expressway environments, we introduce an online Bayesian inference module. This module continuously evaluates vehicle trajectories to dynamically update the probabilistic boundaries of normal driving behaviors, serving as an asynchronous trigger to precisely localize anomalies in space and time. Instead of processing the continuous video stream, the VLM processes only the localized visual regions indicated by the trigger. This targeted visual input prevents attention dilution and enables accurate semantic reasoning. Extensive evaluations demonstrate that VIBES improves detection accuracy for far-field anomalies and reduces computational overhead, achieving high real-time efficiency and explainability while demonstrating generalization across diverse expressway conditions.
Spatial-Temporal Feedback Diffusion Guidance for Controlled Traffic Imputation
Jan 08, 2026Imputing missing values in spatial-temporal traffic data is essential for intelligent transportation systems. Among advanced imputation methods, score-based diffusion models have demonstrated competitive performance. These models generate data by reversing a noising process, using observed values as conditional guidance. However, existing diffusion models typically apply a uniform guidance scale across both spatial and temporal dimensions, which is inadequate for nodes with high missing data rates. Sparse observations provide insufficient conditional guidance, causing the generative process to drift toward the learned prior distribution rather than closely following the conditional observations, resulting in suboptimal imputation performance. To address this, we propose FENCE, a spatial-temporal feedback diffusion guidance method designed to adaptively control guidance scales during imputation. First, FENCE introduces a dynamic feedback mechanism that adjusts the guidance scale based on the posterior likelihood approximations. The guidance scale is increased when generated values diverge from observations and reduced when alignment improves, preventing overcorrection. Second, because alignment to observations varies across nodes and denoising steps, a global guidance scale for all nodes is suboptimal. FENCE computes guidance scales at the cluster level by grouping nodes based on their attention scores, leveraging spatial-temporal correlations to provide more accurate guidance. Experimental results on real-world traffic datasets show that FENCE significantly enhances imputation accuracy.
RIPCN: A Road Impedance Principal Component Network for Probabilistic Traffic Flow Forecasting
Dec 25, 2025Accurate traffic flow forecasting is crucial for intelligent transportation services such as navigation and ride-hailing. In such applications, uncertainty estimation in forecasting is important because it helps evaluate traffic risk levels, assess forecast reliability, and provide timely warnings. As a result, probabilistic traffic flow forecasting (PTFF) has gained significant attention, as it produces both point forecasts and uncertainty estimates. However, existing PTFF approaches still face two key challenges: (1) how to uncover and model the causes of traffic flow uncertainty for reliable forecasting, and (2) how to capture the spatiotemporal correlations of uncertainty for accurate prediction. To address these challenges, we propose RIPCN, a Road Impedance Principal Component Network that integrates domain-specific transportation theory with spatiotemporal principal component learning for PTFF. RIPCN introduces a dynamic impedance evolution network that captures directional traffic transfer patterns driven by road congestion level and flow variability, revealing the direct causes of uncertainty and enhancing both reliability and interpretability. In addition, a principal component network is designed to forecast the dominant eigenvectors of future flow covariance, enabling the model to capture spatiotemporal uncertainty correlations. This design allows for accurate and efficient uncertainty estimation while also improving point prediction performance. Experimental results on real-world datasets show that our approach outperforms existing probabilistic forecasting methods.
Towards An Efficient and Effective En Route Travel Time Estimation Framework
Apr 05, 2025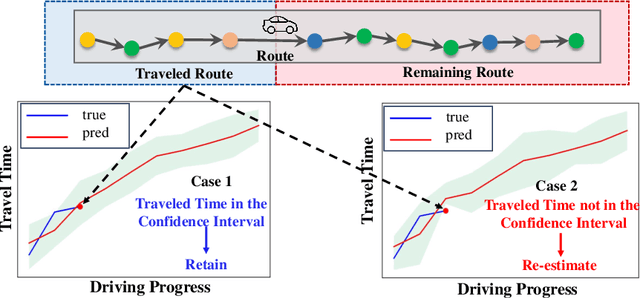

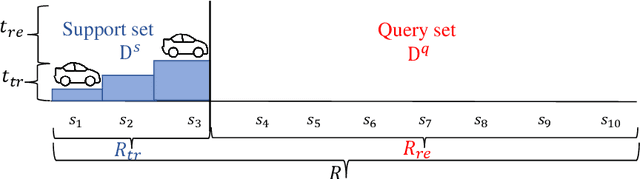

En route travel time estimation (ER-TTE) focuses on predicting the travel time of the remaining route. Existing ER-TTE methods always make re-estimation which significantly hinders real-time performance, especially when faced with the computational demands of simultaneous user requests. This results in delays and reduced responsiveness in ER-TTE services. We propose a general efficient framework U-ERTTE combining an Uncertainty-Guided Decision mechanism (UGD) and Fine-Tuning with Meta-Learning (FTML) to address these challenges. UGD quantifies the uncertainty and provides confidence intervals for the entire route. It selectively re-estimates only when the actual travel time deviates from the predicted confidence intervals, thereby optimizing the efficiency of ER-TTE. To ensure the accuracy of confidence intervals and accurate predictions that need to re-estimate, FTML is employed to train the model, enabling it to learn general driving patterns and specific features to adapt to specific tasks. Extensive experiments on two large-scale real datasets demonstrate that the U-ERTTE framework significantly enhances inference speed and throughput while maintaining high effectiveness. Our code is available at https://github.com/shenzekai/U-ERTTE
DRL4AOI: A DRL Framework for Semantic-aware AOI Segmentation in Location-Based Services
Dec 06, 2024



In Location-Based Services (LBS), such as food delivery, a fundamental task is segmenting Areas of Interest (AOIs), aiming at partitioning the urban geographical spaces into non-overlapping regions. Traditional AOI segmentation algorithms primarily rely on road networks to partition urban areas. While promising in modeling the geo-semantics, road network-based models overlooked the service-semantic goals (e.g., workload equality) in LBS service. In this paper, we point out that the AOI segmentation problem can be naturally formulated as a Markov Decision Process (MDP), which gradually chooses a nearby AOI for each grid in the current AOI's border. Based on the MDP, we present the first attempt to generalize Deep Reinforcement Learning (DRL) for AOI segmentation, leading to a novel DRL-based framework called DRL4AOI. The DRL4AOI framework introduces different service-semantic goals in a flexible way by treating them as rewards that guide the AOI generation. To evaluate the effectiveness of DRL4AOI, we develop and release an AOI segmentation system. We also present a representative implementation of DRL4AOI - TrajRL4AOI - for AOI segmentation in the logistics service. It introduces a Double Deep Q-learning Network (DDQN) to gradually optimize the AOI generation for two specific semantic goals: i) trajectory modularity, i.e., maximize tightness of the trajectory connections within an AOI and the sparsity of connections between AOIs, ii) matchness with the road network, i.e., maximizing the matchness between AOIs and the road network. Quantitative and qualitative experiments conducted on synthetic and real-world data demonstrate the effectiveness and superiority of our method. The code and system is publicly available at https://github.com/Kogler7/AoiOpt.
DiffLight: A Partial Rewards Conditioned Diffusion Model for Traffic Signal Control with Missing Data
Oct 31, 2024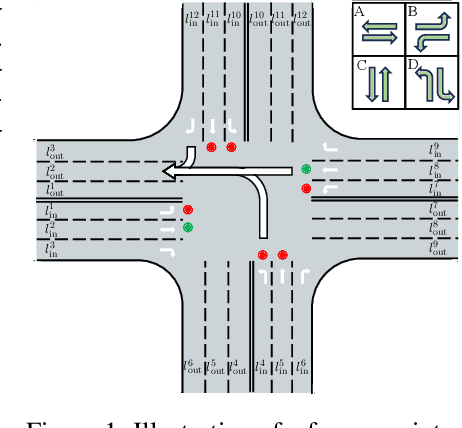
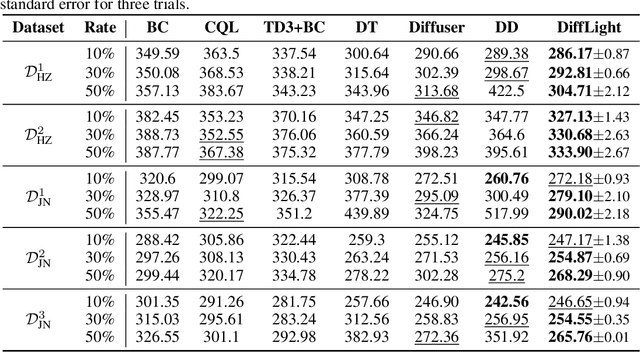
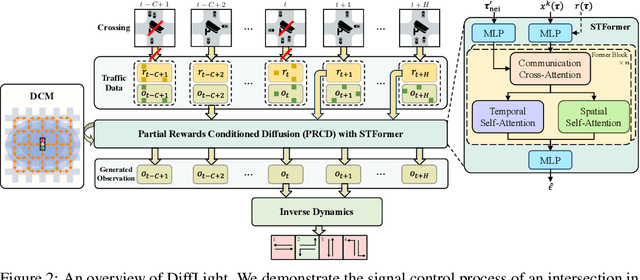
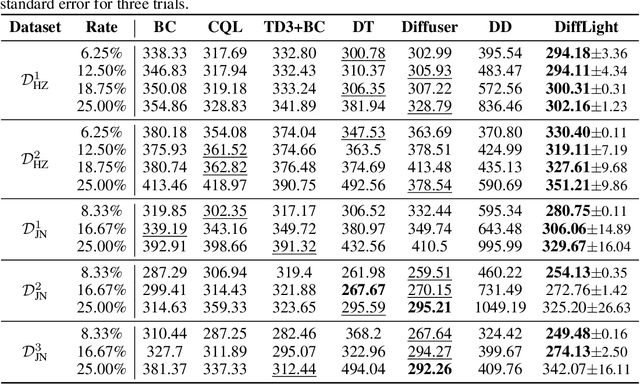
The application of reinforcement learning in traffic signal control (TSC) has been extensively researched and yielded notable achievements. However, most existing works for TSC assume that traffic data from all surrounding intersections is fully and continuously available through sensors. In real-world applications, this assumption often fails due to sensor malfunctions or data loss, making TSC with missing data a critical challenge. To meet the needs of practical applications, we introduce DiffLight, a novel conditional diffusion model for TSC under data-missing scenarios in the offline setting. Specifically, we integrate two essential sub-tasks, i.e., traffic data imputation and decision-making, by leveraging a Partial Rewards Conditioned Diffusion (PRCD) model to prevent missing rewards from interfering with the learning process. Meanwhile, to effectively capture the spatial-temporal dependencies among intersections, we design a Spatial-Temporal transFormer (STFormer) architecture. In addition, we propose a Diffusion Communication Mechanism (DCM) to promote better communication and control performance under data-missing scenarios. Extensive experiments on five datasets with various data-missing scenarios demonstrate that DiffLight is an effective controller to address TSC with missing data. The code of DiffLight is released at https://github.com/lokol5579/DiffLight-release.
DutyTTE: Deciphering Uncertainty in Origin-Destination Travel Time Estimation
Aug 23, 2024Uncertainty quantification in travel time estimation (TTE) aims to estimate the confidence interval for travel time, given the origin (O), destination (D), and departure time (T). Accurately quantifying this uncertainty requires generating the most likely path and assessing travel time uncertainty along the path. This involves two main challenges: 1) Predicting a path that aligns with the ground truth, and 2) modeling the impact of travel time in each segment on overall uncertainty under varying conditions. We propose DutyTTE to address these challenges. For the first challenge, we introduce a deep reinforcement learning method to improve alignment between the predicted path and the ground truth, providing more accurate travel time information from road segments to improve TTE. For the second challenge, we propose a mixture of experts guided uncertainty quantification mechanism to better capture travel time uncertainty for each segment under varying contexts. Additionally, we calibrate our results using Hoeffding's upper-confidence bound to provide statistical guarantees for the estimated confidence intervals. Extensive experiments on two real-world datasets demonstrate the superiority of our proposed method.
STD-LLM: Understanding Both Spatial and Temporal Properties of Spatial-Temporal Data with LLMs
Jul 12, 2024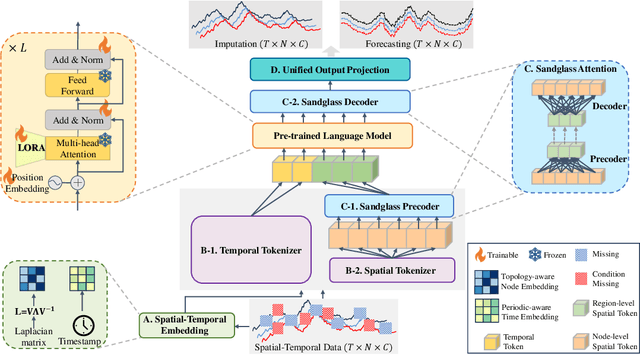
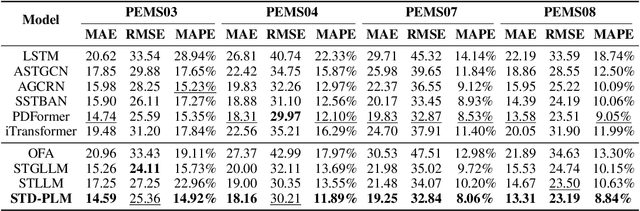
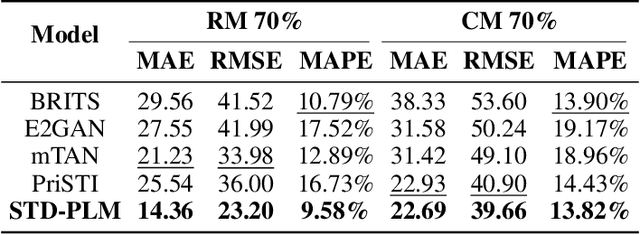

Spatial-temporal forecasting and imputation are important for real-world dynamic systems such as intelligent transportation, urban planning, and public health. Most existing methods are tailored for individual forecasting or imputation tasks but are not designed for both. Additionally, they are less effective for zero-shot and few-shot learning. While large language models (LLMs) have exhibited strong pattern recognition and reasoning abilities across various tasks, including few-shot and zero-shot learning, their development in understanding spatial-temporal data has been constrained by insufficient modeling of complex correlations such as the temporal correlations, spatial connectivity, non-pairwise and high-order spatial-temporal correlations within data. In this paper, we propose STD-LLM for understanding both spatial and temporal properties of \underline{S}patial-\underline{T}emporal \underline{D}ata with \underline{LLM}s, which is capable of implementing both spatial-temporal forecasting and imputation tasks. STD-LLM understands spatial-temporal correlations via explicitly designed spatial and temporal tokenizers as well as virtual nodes. Topology-aware node embeddings are designed for LLMs to comprehend and exploit the topology structure of data. Additionally, to capture the non-pairwise and higher-order correlations, we design a hypergraph learning module for LLMs, which can enhance the overall performance and improve efficiency. Extensive experiments demonstrate that STD-LLM exhibits strong performance and generalization capabilities across the forecasting and imputation tasks on various datasets. Moreover, STD-LLM achieves promising results on both few-shot and zero-shot learning tasks.
A Survey on Service Route and Time Prediction in Instant Delivery: Taxonomy, Progress, and Prospects
Sep 03, 2023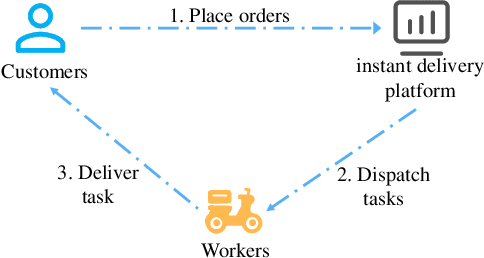
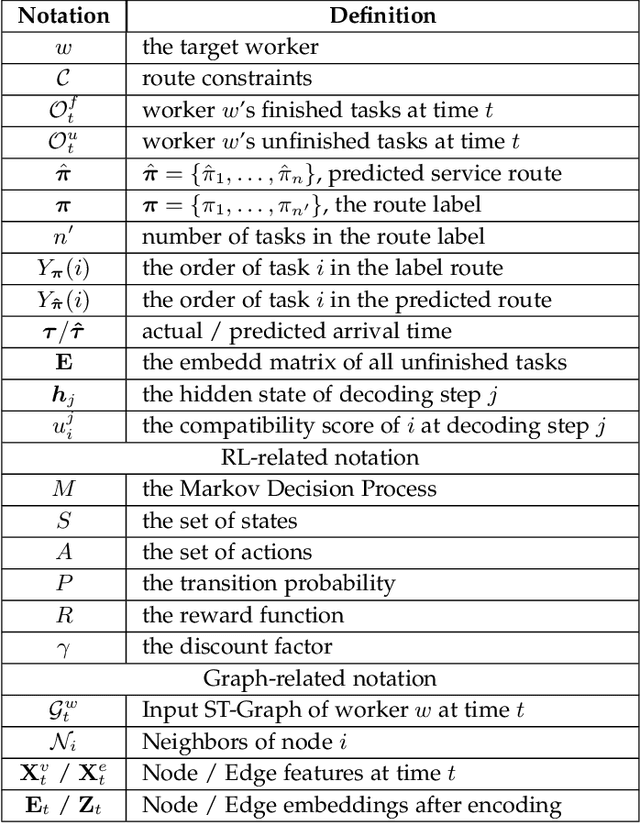
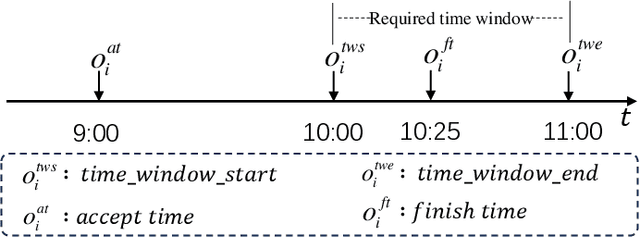
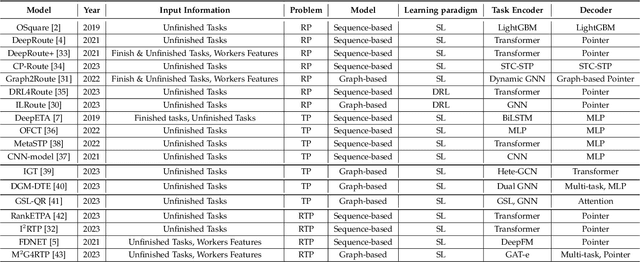
Instant delivery services, such as food delivery and package delivery, have achieved explosive growth in recent years by providing customers with daily-life convenience. An emerging research area within these services is service Route\&Time Prediction (RTP), which aims to estimate the future service route as well as the arrival time of a given worker. As one of the most crucial tasks in those service platforms, RTP stands central to enhancing user satisfaction and trimming operational expenditures on these platforms. Despite a plethora of algorithms developed to date, there is no systematic, comprehensive survey to guide researchers in this domain. To fill this gap, our work presents the first comprehensive survey that methodically categorizes recent advances in service route and time prediction. We start by defining the RTP challenge and then delve into the metrics that are often employed. Following that, we scrutinize the existing RTP methodologies, presenting a novel taxonomy of them. We categorize these methods based on three criteria: (i) type of task, subdivided into only-route prediction, only-time prediction, and joint route\&time prediction; (ii) model architecture, which encompasses sequence-based and graph-based models; and (iii) learning paradigm, including Supervised Learning (SL) and Deep Reinforcement Learning (DRL). Conclusively, we highlight the limitations of current research and suggest prospective avenues. We believe that the taxonomy, progress, and prospects introduced in this paper can significantly promote the development of this field.
DRL4Route: A Deep Reinforcement Learning Framework for Pick-up and Delivery Route Prediction
Jul 30, 2023



Pick-up and Delivery Route Prediction (PDRP), which aims to estimate the future service route of a worker given his current task pool, has received rising attention in recent years. Deep neural networks based on supervised learning have emerged as the dominant model for the task because of their powerful ability to capture workers' behavior patterns from massive historical data. Though promising, they fail to introduce the non-differentiable test criteria into the training process, leading to a mismatch in training and test criteria. Which considerably trims down their performance when applied in practical systems. To tackle the above issue, we present the first attempt to generalize Reinforcement Learning (RL) to the route prediction task, leading to a novel RL-based framework called DRL4Route. It combines the behavior-learning abilities of previous deep learning models with the non-differentiable objective optimization ability of reinforcement learning. DRL4Route can serve as a plug-and-play component to boost the existing deep learning models. Based on the framework, we further implement a model named DRL4Route-GAE for PDRP in logistic service. It follows the actor-critic architecture which is equipped with a Generalized Advantage Estimator that can balance the bias and variance of the policy gradient estimates, thus achieving a more optimal policy. Extensive offline experiments and the online deployment show that DRL4Route-GAE improves Location Square Deviation (LSD) by 0.9%-2.7%, and Accuracy@3 (ACC@3) by 2.4%-3.2% over existing methods on the real-world dataset.