 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Frontier LLMs on PhD-Level Mathematical Reasoning: A Benchmark on a Textbook in Theoretical Computer Science about Randomized Algorithms
Dec 16, 2025The rapid advancement of large language models (LLMs) has led to significant breakthroughs in automated mathematical reasoning and scientific discovery. Georgiev, G${ó}$mez-Serrano, Tao, and Wagner [GGSTW+25] demonstrate that AI systems can explore new constructions and improve existing bounds, illustrating the growing potential of LLMs to accelerate mathematical discovery. Similarly, Bubeck et al. [BCE+25] show that GPT-5 can meaningfully contribute to scientific workflows, from proposing hypotheses to generating proofs and analyses. Despite these advances, a rigorous evaluation of these models on canonical, graduate-level mathematical theory remains necessary to understand their baseline reasoning capabilities. In this paper, we present a comprehensive benchmark of four frontier models: GPT-5-Thinking, Gemini-3-Pro, Claude-Sonnet-4.5-Thinking, and Grok-4 against the classic curriculum of Randomized Algorithms by Motwani and Raghavan [MR95]. We tasked each model with generating formal LaTeX proofs for a series of lemmas and exercises spanning the textbook. We find that while the top-tier models (Gemini, and Claude) achieve a high accuracy rate (approx. 66%), demonstrating a robust grasp of probabilistic method and formal logic, other models lag significantly in consistency (approx. 40%). We provide a qualitative analysis of the generated proofs, highlighting differences in conciseness, hallucination rates, and logical structure. Our results suggest that while frontier models have reached a threshold of proficiency suitable for graduate-level pedagogical assistance and formalization, significant variance exists in their reliability for rigorous mathematical derivation. The code and the full set of LLM-generated responses are open-sourced and publicly available at https://github.com/magiclinux/math_benchmark_probability.
Towards High-Order Mean Flow Generative Models: Feasibility, Expressivity, and Provably Efficient Criteria
Aug 09, 2025Generative modelling has seen significant advances through simulation-free paradigms such as Flow Matching, and in particular, the MeanFlow framework, which replaces instantaneous velocity fields with average velocities to enable efficient single-step sampling. In this work, we introduce a theoretical study on Second-Order MeanFlow, a novel extension that incorporates average acceleration fields into the MeanFlow objective. We first establish the feasibility of our approach by proving that the average acceleration satisfies a generalized consistency condition analogous to first-order MeanFlow, thereby supporting stable, one-step sampling and tractable loss functions. We then characterize its expressivity via circuit complexity analysis, showing that under mild assumptions, the Second-Order MeanFlow sampling process can be implemented by uniform threshold circuits within the $\mathsf{TC}^0$ class. Finally, we derive provably efficient criteria for scalable implementation by leveraging fast approximate attention computations: we prove that attention operations within the Second-Order MeanFlow architecture can be approximated to within $1/\mathrm{poly}(n)$ error in time $n^{2+o(1)}$. Together, these results lay the theoretical foundation for high-order flow matching models that combine rich dynamics with practical sampling efficiency.
T2VWorldBench: A Benchmark for Evaluating World Knowledge in Text-to-Video Generation
Jul 24, 2025Text-to-video (T2V) models have shown remarkable performance in generating visually reasonable scenes, while their capability to leverage world knowledge for ensuring semantic consistency and factual accuracy remains largely understudied. In response to this challenge, we propose T2VWorldBench, the first systematic evaluation framework for evaluating the world knowledge generation abilities of text-to-video models, covering 6 major categories, 60 subcategories, and 1,200 prompts across a wide range of domains, including physics, nature, activity, culture, causality, and object. To address both human preference and scalable evaluation, our benchmark incorporates both human evaluation and automated evaluation using vision-language models (VLMs). We evaluated the 10 most advanced text-to-video models currently available, ranging from open source to commercial models, and found that most models are unable to understand world knowledge and generate truly correct videos. These findings point out a critical gap in the capability of current text-to-video models to leverage world knowledge, providing valuable research opportunities and entry points for constructing models with robust capabilities for commonsense reasoning and factual generation.
GraphTeam: Facilitating Large Language Model-based Graph Analysis via Multi-Agent Collaboration
Oct 23, 2024



Graphs are widely used for modeling relational data in real-world scenarios, such as social networks and urban computing. Existing LLM-based graph analysis approaches either integrate graph neural networks (GNNs) for specific machine learning tasks, limiting their transferability, or rely solely on LLMs' internal reasoning ability, resulting in suboptimal performance. To address these limitations, we take advantage of recent advances in LLM-based agents, which have shown capabilities of utilizing external knowledge or tools for problem solving. By simulating human problem-solving strategies such as analogy and collaboration, we propose a multi-agent system based on LLMs named GraphTeam, for graph analysis. GraphTeam consists of five LLM-based agents from three modules, and the agents with different specialities can collaborate with each other to address complex problems. Specifically, (1) input-output normalization module: the question agent extracts and refines four key arguments from the original question, facilitating the problem understanding, and the answer agent organizes the results to meet the output requirement; (2) external knowledge retrieval module: we first build a knowledge base consisting of relevant documentation and experience information, and then the search agent retrieves the most relevant entries for each question. (3) problem-solving module: given the retrieved information from search agent, the coding agent uses established algorithms via programming to generate solutions, and in case the coding agent does not work, the reasoning agent will directly compute the results without programming. Extensive experiments on six graph analysis benchmarks demonstrate that GraphTeam achieves state-of-the-art performance with an average 25.85% improvement over the best baseline in terms of accuracy. The code and data are available at https://github.com/BUPT-GAMMA/GraphTeam.
DutyTTE: Deciphering Uncertainty in Origin-Destination Travel Time Estimation
Aug 23, 2024Uncertainty quantification in travel time estimation (TTE) aims to estimate the confidence interval for travel time, given the origin (O), destination (D), and departure time (T). Accurately quantifying this uncertainty requires generating the most likely path and assessing travel time uncertainty along the path. This involves two main challenges: 1) Predicting a path that aligns with the ground truth, and 2) modeling the impact of travel time in each segment on overall uncertainty under varying conditions. We propose DutyTTE to address these challenges. For the first challenge, we introduce a deep reinforcement learning method to improve alignment between the predicted path and the ground truth, providing more accurate travel time information from road segments to improve TTE. For the second challenge, we propose a mixture of experts guided uncertainty quantification mechanism to better capture travel time uncertainty for each segment under varying contexts. Additionally, we calibrate our results using Hoeffding's upper-confidence bound to provide statistical guarantees for the estimated confidence intervals. Extensive experiments on two real-world datasets demonstrate the superiority of our proposed method.
STD-LLM: Understanding Both Spatial and Temporal Properties of Spatial-Temporal Data with LLMs
Jul 12, 2024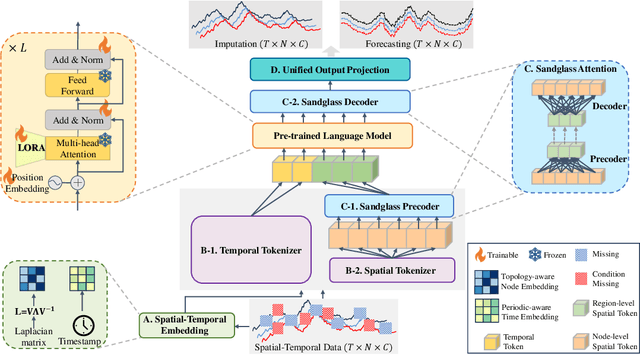
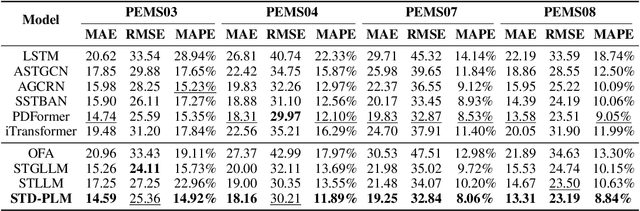
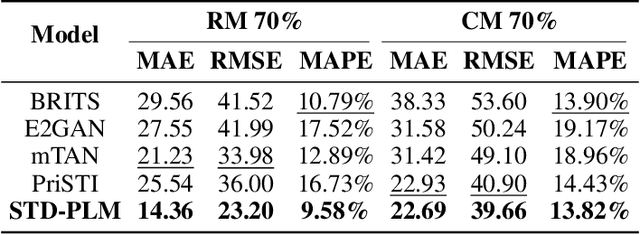

Spatial-temporal forecasting and imputation are important for real-world dynamic systems such as intelligent transportation, urban planning, and public health. Most existing methods are tailored for individual forecasting or imputation tasks but are not designed for both. Additionally, they are less effective for zero-shot and few-shot learning. While large language models (LLMs) have exhibited strong pattern recognition and reasoning abilities across various tasks, including few-shot and zero-shot learning, their development in understanding spatial-temporal data has been constrained by insufficient modeling of complex correlations such as the temporal correlations, spatial connectivity, non-pairwise and high-order spatial-temporal correlations within data. In this paper, we propose STD-LLM for understanding both spatial and temporal properties of \underline{S}patial-\underline{T}emporal \underline{D}ata with \underline{LLM}s, which is capable of implementing both spatial-temporal forecasting and imputation tasks. STD-LLM understands spatial-temporal correlations via explicitly designed spatial and temporal tokenizers as well as virtual nodes. Topology-aware node embeddings are designed for LLMs to comprehend and exploit the topology structure of data. Additionally, to capture the non-pairwise and higher-order correlations, we design a hypergraph learning module for LLMs, which can enhance the overall performance and improve efficiency. Extensive experiments demonstrate that STD-LLM exhibits strong performance and generalization capabilities across the forecasting and imputation tasks on various datasets. Moreover, STD-LLM achieves promising results on both few-shot and zero-shot learning tasks.
Out-of-distribution Detection in Medical Image Analysis: A survey
Apr 28, 2024
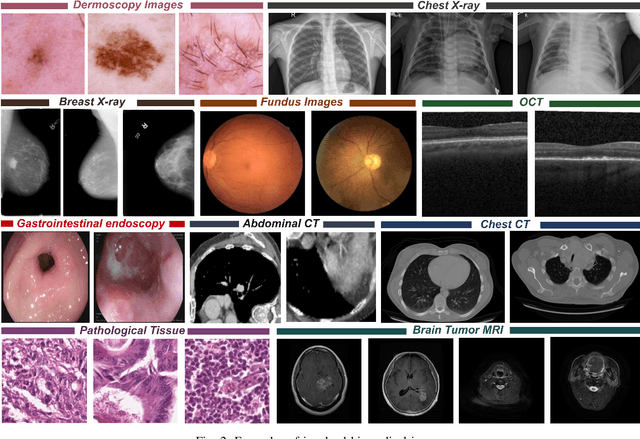
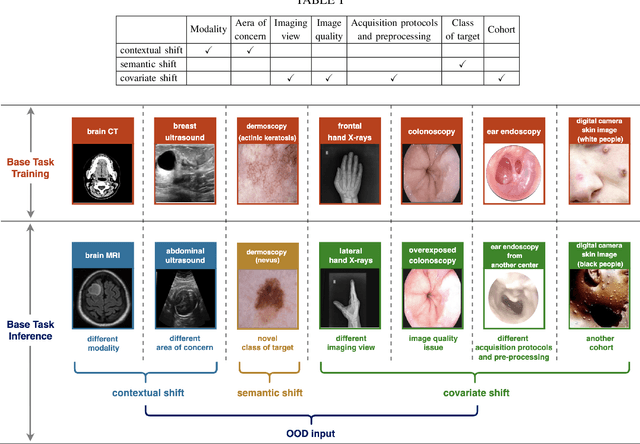

Computer-aided diagnostics has benefited from the development of deep learning-based computer vision techniques in these years. Traditional supervised deep learning methods assume that the test sample is drawn from the identical distribution as the training data. However, it is possible to encounter out-of-distribution samples in real-world clinical scenarios, which may cause silent failure in deep learning-based medical image analysis tasks. Recently, research has explored various out-of-distribution (OOD) detection situations and techniques to enable a trustworthy medical AI system. In this survey, we systematically review the recent advances in OOD detection in medical image analysis. We first explore several factors that may cause a distributional shift when using a deep-learning-based model in clinic scenarios, with three different types of distributional shift well defined on top of these factors. Then a framework is suggested to categorize and feature existing solutions, while the previous studies are reviewed based on the methodology taxonomy. Our discussion also includes evaluation protocols and metrics, as well as the challenge and a research direction lack of exploration.