 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeICo3D: An Interactive Conversational 3D Virtual Human
Jan 19, 2026This work presents Interactive Conversational 3D Virtual Human (ICo3D), a method for generating an interactive, conversational, and photorealistic 3D human avatar. Based on multi-view captures of a subject, we create an animatable 3D face model and a dynamic 3D body model, both rendered by splatting Gaussian primitives. Once merged together, they represent a lifelike virtual human avatar suitable for real-time user interactions. We equip our avatar with an LLM for conversational ability. During conversation, the audio speech of the avatar is used as a driving signal to animate the face model, enabling precise synchronization. We describe improvements to our dynamic Gaussian models that enhance photorealism: SWinGS++ for body reconstruction and HeadGaS++ for face reconstruction, and provide as well a solution to merge the separate face and body models without artifacts. We also present a demo of the complete system, showcasing several use cases of real-time conversation with the 3D avatar. Our approach offers a fully integrated virtual avatar experience, supporting both oral and written form interactions in immersive environments. ICo3D is applicable to a wide range of fields, including gaming, virtual assistance, and personalized education, among others. Project page: https://ico3d.github.io/
Map2Thought: Explicit 3D Spatial Reasoning via Metric Cognitive Maps
Jan 16, 2026We propose Map2Thought, a framework that enables explicit and interpretable spatial reasoning for 3D VLMs. The framework is grounded in two key components: Metric Cognitive Map (Metric-CogMap) and Cognitive Chain-of-Thought (Cog-CoT). Metric-CogMap provides a unified spatial representation by integrating a discrete grid for relational reasoning with a continuous, metric-scale representation for precise geometric understanding. Building upon the Metric-CogMap, Cog-CoT performs explicit geometric reasoning through deterministic operations, including vector operations, bounding-box distances, and occlusion-aware appearance order cues, producing interpretable inference traces grounded in 3D structure. Experimental results show that Map2Thought enables explainable 3D understanding, achieving 59.9% accuracy using only half the supervision, closely matching the 60.9% baseline trained with the full dataset. It consistently outperforms state-of-the-art methods by 5.3%, 4.8%, and 4.0% under 10%, 25%, and 50% training subsets, respectively, on the VSI-Bench.
SA-ResGS: Self-Augmented Residual 3D Gaussian Splatting for Next Best View Selection
Jan 06, 2026We propose Self-Augmented Residual 3D Gaussian Splatting (SA-ResGS), a novel framework to stabilize uncertainty quantification and enhancing uncertainty-aware supervision in next-best-view (NBV) selection for active scene reconstruction. SA-ResGS improves both the reliability of uncertainty estimates and their effectiveness for supervision by generating Self-Augmented point clouds (SA-Points) via triangulation between a training view and a rasterized extrapolated view, enabling efficient scene coverage estimation. While improving scene coverage through physically guided view selection, SA-ResGS also addresses the challenge of under-supervised Gaussians, exacerbated by sparse and wide-baseline views, by introducing the first residual learning strategy tailored for 3D Gaussian Splatting. This targeted supervision enhances gradient flow in high-uncertainty Gaussians by combining uncertainty-driven filtering with dropout- and hard-negative-mining-inspired sampling. Our contributions are threefold: (1) a physically grounded view selection strategy that promotes efficient and uniform scene coverage; (2) an uncertainty-aware residual supervision scheme that amplifies learning signals for weakly contributing Gaussians, improving training stability and uncertainty estimation across scenes with diverse camera distributions; (3) an implicit unbiasing of uncertainty quantification as a consequence of constrained view selection and residual supervision, which together mitigate conflicting effects of wide-baseline exploration and sparse-view ambiguity in NBV planning. Experiments on active view selection demonstrate that SA-ResGS outperforms state-of-the-art baselines in both reconstruction quality and view selection robustness.
Off The Grid: Detection of Primitives for Feed-Forward 3D Gaussian Splatting
Dec 17, 2025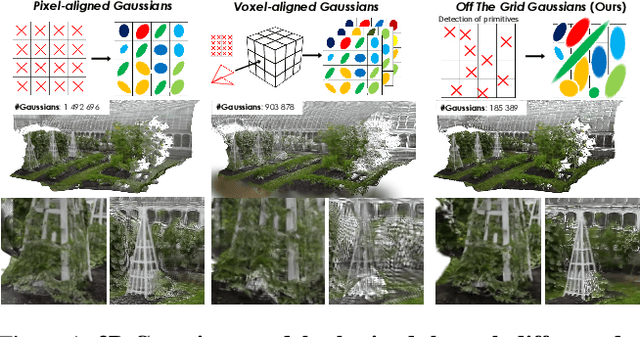
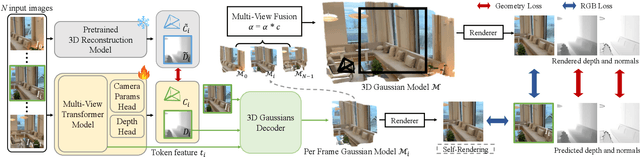
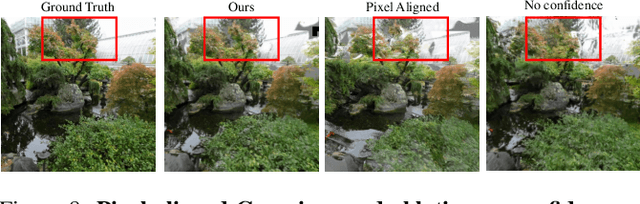

Feed-forward 3D Gaussian Splatting (3DGS) models enable real-time scene generation but are hindered by suboptimal pixel-aligned primitive placement, which relies on a dense, rigid grid and limits both quality and efficiency. We introduce a new feed-forward architecture that detects 3D Gaussian primitives at a sub-pixel level, replacing the pixel grid with an adaptive, "Off The Grid" distribution. Inspired by keypoint detection, our multi-resolution decoder learns to distribute primitives across image patches. This module is trained end-to-end with a 3D reconstruction backbone using self-supervised learning. Our resulting pose-free model generates photorealistic scenes in seconds, achieving state-of-the-art novel view synthesis for feed-forward models. It outperforms competitors while using far fewer primitives, demonstrating a more accurate and efficient allocation that captures fine details and reduces artifacts. Moreover, we observe that by learning to render 3D Gaussians, our 3D reconstruction backbone improves camera pose estimation, suggesting opportunities to train these foundational models without labels.
Charge: A Comprehensive Novel View Synthesis Benchmark and Dataset to Bind Them All
Dec 15, 2025This paper presents a new dataset for Novel View Synthesis, generated from a high-quality, animated film with stunning realism and intricate detail. Our dataset captures a variety of dynamic scenes, complete with detailed textures, lighting, and motion, making it ideal for training and evaluating cutting-edge 4D scene reconstruction and novel view generation models. In addition to high-fidelity RGB images, we provide multiple complementary modalities, including depth, surface normals, object segmentation and optical flow, enabling a deeper understanding of scene geometry and motion. The dataset is organised into three distinct benchmarking scenarios: a dense multi-view camera setup, a sparse camera arrangement, and monocular video sequences, enabling a wide range of experimentation and comparison across varying levels of data sparsity. With its combination of visual richness, high-quality annotations, and diverse experimental setups, this dataset offers a unique resource for pushing the boundaries of view synthesis and 3D vision.
ViDAR: Video Diffusion-Aware 4D Reconstruction From Monocular Inputs
Jun 23, 2025


Dynamic Novel View Synthesis aims to generate photorealistic views of moving subjects from arbitrary viewpoints. This task is particularly challenging when relying on monocular video, where disentangling structure from motion is ill-posed and supervision is scarce. We introduce Video Diffusion-Aware Reconstruction (ViDAR), a novel 4D reconstruction framework that leverages personalised diffusion models to synthesise a pseudo multi-view supervision signal for training a Gaussian splatting representation. By conditioning on scene-specific features, ViDAR recovers fine-grained appearance details while mitigating artefacts introduced by monocular ambiguity. To address the spatio-temporal inconsistency of diffusion-based supervision, we propose a diffusion-aware loss function and a camera pose optimisation strategy that aligns synthetic views with the underlying scene geometry. Experiments on DyCheck, a challenging benchmark with extreme viewpoint variation, show that ViDAR outperforms all state-of-the-art baselines in visual quality and geometric consistency. We further highlight ViDAR's strong improvement over baselines on dynamic regions and provide a new benchmark to compare performance in reconstructing motion-rich parts of the scene. Project page: https://vidar-4d.github.io
CoMapGS: Covisibility Map-based Gaussian Splatting for Sparse Novel View Synthesis
Mar 25, 2025We propose Covisibility Map-based Gaussian Splatting (CoMapGS), designed to recover underrepresented sparse regions in sparse novel view synthesis. CoMapGS addresses both high- and low-uncertainty regions by constructing covisibility maps, enhancing initial point clouds, and applying uncertainty-aware weighted supervision using a proximity classifier. Our contributions are threefold: (1) CoMapGS reframes novel view synthesis by leveraging covisibility maps as a core component to address region-specific uncertainty; (2) Enhanced initial point clouds for both low- and high-uncertainty regions compensate for sparse COLMAP-derived point clouds, improving reconstruction quality and benefiting few-shot 3DGS methods; (3) Adaptive supervision with covisibility-score-based weighting and proximity classification achieves consistent performance gains across scenes with varying sparsity scores derived from covisibility maps. Experimental results demonstrate that CoMapGS outperforms state-of-the-art methods on datasets including Mip-NeRF 360 and LLFF.
Better Together: Unified Motion Capture and 3D Avatar Reconstruction
Mar 12, 2025We present Better Together, a method that simultaneously solves the human pose estimation problem while reconstructing a photorealistic 3D human avatar from multi-view videos. While prior art usually solves these problems separately, we argue that joint optimization of skeletal motion with a 3D renderable body model brings synergistic effects, i.e. yields more precise motion capture and improved visual quality of real-time rendering of avatars. To achieve this, we introduce a novel animatable avatar with 3D Gaussians rigged on a personalized mesh and propose to optimize the motion sequence with time-dependent MLPs that provide accurate and temporally consistent pose estimates. We first evaluate our method on highly challenging yoga poses and demonstrate state-of-the-art accuracy on multi-view human pose estimation, reducing error by 35% on body joints and 45% on hand joints compared to keypoint-based methods. At the same time, our method significantly boosts the visual quality of animatable avatars (+2dB PSNR on novel view synthesis) on diverse challenging subjects.
GASPACHO: Gaussian Splatting for Controllable Humans and Objects
Mar 12, 2025We present GASPACHO: a method for generating photorealistic controllable renderings of human-object interactions. Given a set of multi-view RGB images of human-object interactions, our method reconstructs animatable templates of the human and object as separate sets of Gaussians simultaneously. Different from existing work, which focuses on human reconstruction and ignores objects as background, our method explicitly reconstructs both humans and objects, thereby allowing for controllable renderings of novel human object interactions in different poses from novel-camera viewpoints. During reconstruction, we constrain the Gaussians that generate rendered images to be a linear function of a set of canonical Gaussians. By simply changing the parameters of the linear deformation functions after training, our method can generate renderings of novel human-object interaction in novel poses from novel camera viewpoints. We learn the 3D Gaussian properties of the canonical Gaussians on the underlying 2D manifold of the canonical human and object templates. This in turns requires a canonical object template with a fixed UV unwrapping. To define such an object template, we use a feature based representation to track the object across the multi-view sequence. We further propose an occlusion aware photometric loss that allows for reconstructions under significant occlusions. Several experiments on two human-object datasets - BEHAVE and DNA-Rendering - demonstrate that our method allows for high-quality reconstruction of human and object templates under significant occlusion and the synthesis of controllable renderings of novel human-object interactions in novel human poses from novel camera views.
SCRREAM : SCan, Register, REnder And Map:A Framework for Annotating Accurate and Dense 3D Indoor Scenes with a Benchmark
Oct 30, 2024



Traditionally, 3d indoor datasets have generally prioritized scale over ground-truth accuracy in order to obtain improved generalization. However, using these datasets to evaluate dense geometry tasks, such as depth rendering, can be problematic as the meshes of the dataset are often incomplete and may produce wrong ground truth to evaluate the details. In this paper, we propose SCRREAM, a dataset annotation framework that allows annotation of fully dense meshes of objects in the scene and registers camera poses on the real image sequence, which can produce accurate ground truth for both sparse 3D as well as dense 3D tasks. We show the details of the dataset annotation pipeline and showcase four possible variants of datasets that can be obtained from our framework with example scenes, such as indoor reconstruction and SLAM, scene editing & object removal, human reconstruction and 6d pose estimation. Recent pipelines for indoor reconstruction and SLAM serve as new benchmarks. In contrast to previous indoor dataset, our design allows to evaluate dense geometry tasks on eleven sample scenes against accurately rendered ground truth depth maps.