 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRVS: a Generalizable and Recurrent Approach to Monocular Dynamic View Synthesis
Mar 31, 2026Synthesizing novel views from monocular videos of dynamic scenes remains a challenging problem. Scene-specific methods that optimize 4D representations with explicit motion priors often break down in highly dynamic regions where multi-view information is hard to exploit. Diffusion-based approaches that integrate camera control into large pre-trained models can produce visually plausible videos but frequently suffer from geometric inconsistencies across both static and dynamic areas. Both families of methods also require substantial computational resources. Building on the success of generalizable models for static novel view synthesis, we adapt the framework to dynamic inputs and propose a new model with two key components: (1) a recurrent loop that enables unbounded and asynchronous mapping between input and target videos and (2) an efficient use of plane sweeps over dynamic inputs to disentangle camera and scene motion, and achieve fine-grained, six-degrees-of-freedom camera controls. We train and evaluate our model on the UCSD dataset and on Kubric-4D-dyn, a new monocular dynamic dataset featuring longer, higher resolution sequences with more complex scene dynamics than existing alternatives. Our model outperforms four Gaussian Splatting-based scene-specific approaches, as well as two diffusion-based approaches in reconstructing fine-grained geometric details across both static and dynamic regions.
ViDAR: Video Diffusion-Aware 4D Reconstruction From Monocular Inputs
Jun 23, 2025

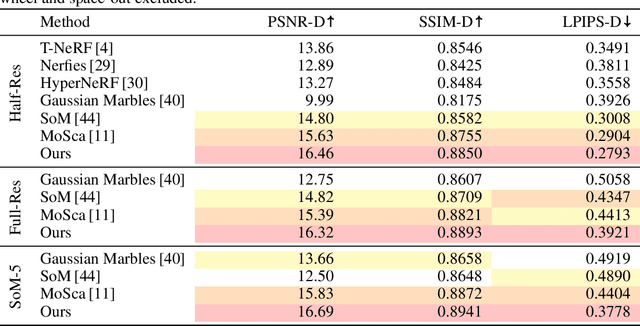

Dynamic Novel View Synthesis aims to generate photorealistic views of moving subjects from arbitrary viewpoints. This task is particularly challenging when relying on monocular video, where disentangling structure from motion is ill-posed and supervision is scarce. We introduce Video Diffusion-Aware Reconstruction (ViDAR), a novel 4D reconstruction framework that leverages personalised diffusion models to synthesise a pseudo multi-view supervision signal for training a Gaussian splatting representation. By conditioning on scene-specific features, ViDAR recovers fine-grained appearance details while mitigating artefacts introduced by monocular ambiguity. To address the spatio-temporal inconsistency of diffusion-based supervision, we propose a diffusion-aware loss function and a camera pose optimisation strategy that aligns synthetic views with the underlying scene geometry. Experiments on DyCheck, a challenging benchmark with extreme viewpoint variation, show that ViDAR outperforms all state-of-the-art baselines in visual quality and geometric consistency. We further highlight ViDAR's strong improvement over baselines on dynamic regions and provide a new benchmark to compare performance in reconstructing motion-rich parts of the scene. Project page: https://vidar-4d.github.io
RoGUENeRF: A Robust Geometry-Consistent Universal Enhancer for NeRF
Mar 18, 2024
Recent advances in neural rendering have enabled highly photorealistic 3D scene reconstruction and novel view synthesis. Despite this progress, current state-of-the-art methods struggle to reconstruct high frequency detail, due to factors such as a low-frequency bias of radiance fields and inaccurate camera calibration. One approach to mitigate this issue is to enhance images post-rendering. 2D enhancers can be pre-trained to recover some detail but are agnostic to scene geometry and do not easily generalize to new distributions of image degradation. Conversely, existing 3D enhancers are able to transfer detail from nearby training images in a generalizable manner, but suffer from inaccurate camera calibration and can propagate errors from the geometry into rendered images. We propose a neural rendering enhancer, RoGUENeRF, which exploits the best of both paradigms. Our method is pre-trained to learn a general enhancer while also leveraging information from nearby training images via robust 3D alignment and geometry-aware fusion. Our approach restores high-frequency textures while maintaining geometric consistency and is also robust to inaccurate camera calibration. We show that RoGUENeRF substantially enhances the rendering quality of a wide range of neural rendering baselines, e.g. improving the PSNR of MipNeRF360 by 0.63dB and Nerfacto by 1.34dB on the real world 360v2 dataset.
SWAGS: Sampling Windows Adaptively for Dynamic 3D Gaussian Splatting
Dec 20, 2023Novel view synthesis has shown rapid progress recently, with methods capable of producing evermore photo-realistic results. 3D Gaussian Splatting has emerged as a particularly promising method, producing high-quality renderings of static scenes and enabling interactive viewing at real-time frame rates. However, it is currently limited to static scenes only. In this work, we extend 3D Gaussian Splatting to reconstruct dynamic scenes. We model the dynamics of a scene using a tunable MLP, which learns the deformation field from a canonical space to a set of 3D Gaussians per frame. To disentangle the static and dynamic parts of the scene, we learn a tuneable parameter for each Gaussian, which weighs the respective MLP parameters to focus attention on the dynamic parts. This improves the model's ability to capture dynamics in scenes with an imbalance of static to dynamic regions. To handle scenes of arbitrary length whilst maintaining high rendering quality, we introduce an adaptive window sampling strategy to partition the sequence into windows based on the amount of movement in the sequence. We train a separate dynamic Gaussian Splatting model for each window, allowing the canonical representation to change, thus enabling the reconstruction of scenes with significant geometric or topological changes. Temporal consistency is enforced using a fine-tuning step with self-supervising consistency loss on randomly sampled novel views. As a result, our method produces high-quality renderings of general dynamic scenes with competitive quantitative performance, which can be viewed in real-time with our dynamic interactive viewer.
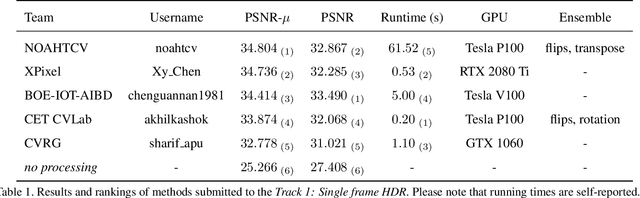
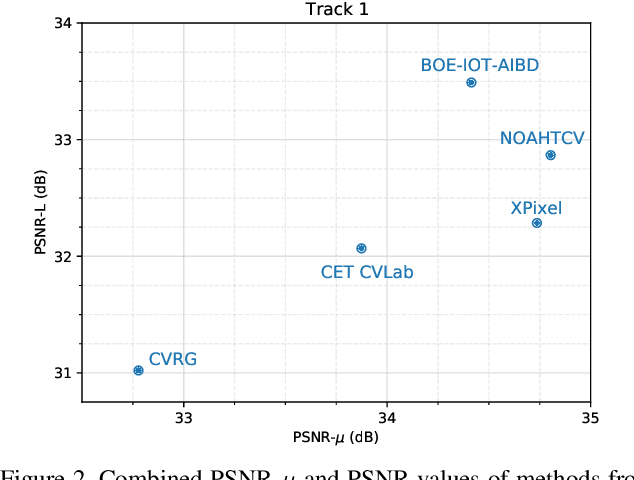
NTIRE 2022 Challenge on High Dynamic Range Imaging: Methods and Results
May 25, 2022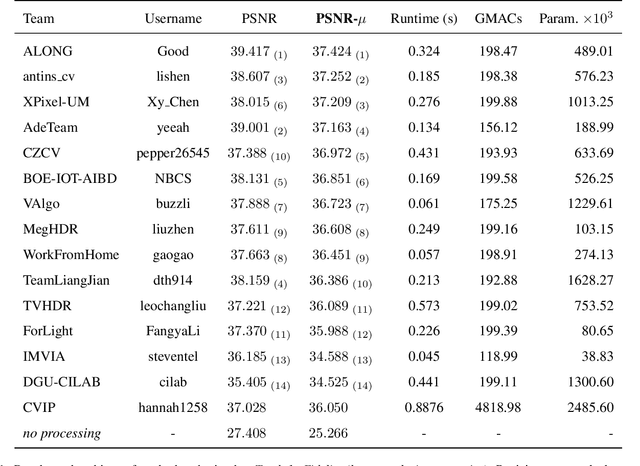
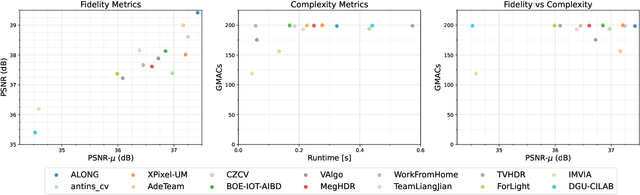
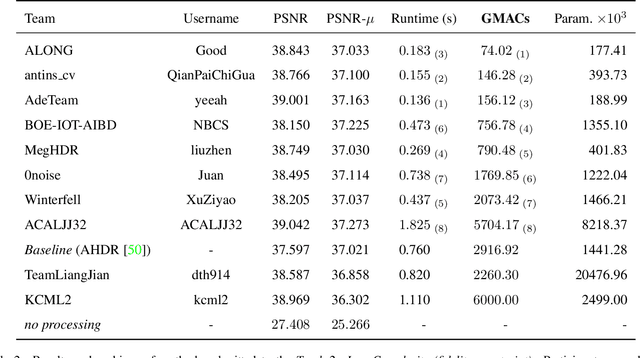
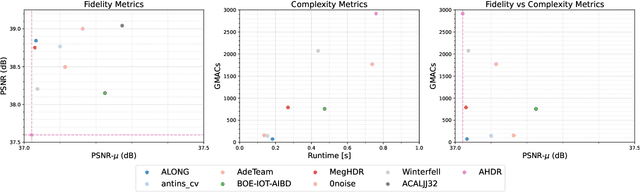
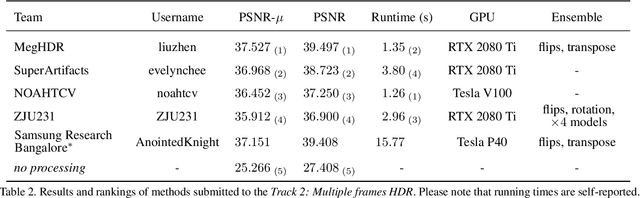
This paper reviews the challenge on constrained high dynamic range (HDR) imaging that was part of the New Trends in Image Restoration and Enhancement (NTIRE) workshop, held in conjunction with CVPR 2022. This manuscript focuses on the competition set-up, datasets, the proposed methods and their results. The challenge aims at estimating an HDR image from multiple respective low dynamic range (LDR) observations, which might suffer from under- or over-exposed regions and different sources of noise. The challenge is composed of two tracks with an emphasis on fidelity and complexity constraints: In Track 1, participants are asked to optimize objective fidelity scores while imposing a low-complexity constraint (i.e. solutions can not exceed a given number of operations). In Track 2, participants are asked to minimize the complexity of their solutions while imposing a constraint on fidelity scores (i.e. solutions are required to obtain a higher fidelity score than the prescribed baseline). Both tracks use the same data and metrics: Fidelity is measured by means of PSNR with respect to a ground-truth HDR image (computed both directly and with a canonical tonemapping operation), while complexity metrics include the number of Multiply-Accumulate (MAC) operations and runtime (in seconds).
* CVPR Workshops 2022. 15 pages, 21 figures, 2 tables
HDR Reconstruction from Bracketed Exposures and Events
Mar 28, 2022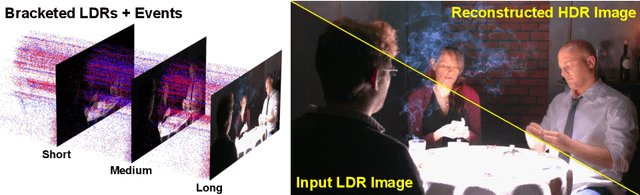
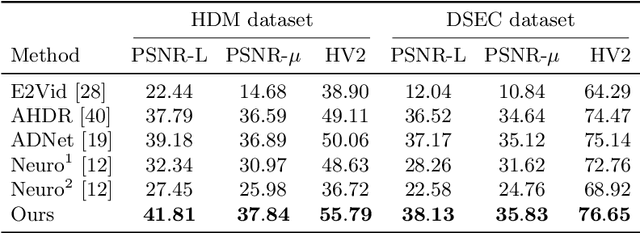
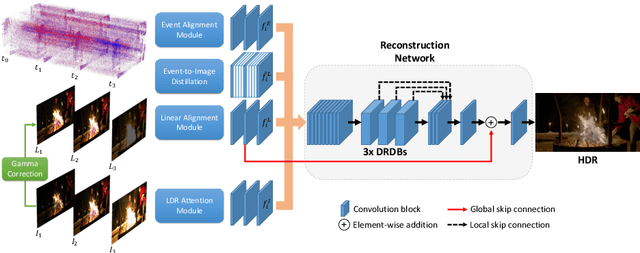
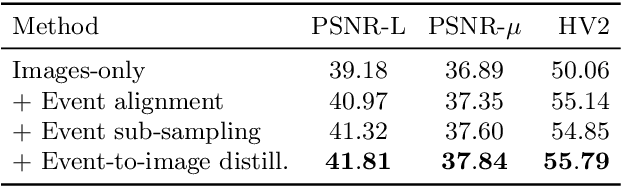
Reconstruction of high-quality HDR images is at the core of modern computational photography. Significant progress has been made with multi-frame HDR reconstruction methods, producing high-resolution, rich and accurate color reconstructions with high-frequency details. However, they are still prone to fail in dynamic or largely over-exposed scenes, where frame misalignment often results in visible ghosting artifacts. Recent approaches attempt to alleviate this by utilizing an event-based camera (EBC), which measures only binary changes of illuminations. Despite their desirable high temporal resolution and dynamic range characteristics, such approaches have not outperformed traditional multi-frame reconstruction methods, mainly due to the lack of color information and low-resolution sensors. In this paper, we propose to leverage both bracketed LDR images and simultaneously captured events to obtain the best of both worlds: high-quality RGB information from bracketed LDRs and complementary high frequency and dynamic range information from events. We present a multi-modal end-to-end learning-based HDR imaging system that fuses bracketed images and event modalities in the feature domain using attention and multi-scale spatial alignment modules. We propose a novel event-to-image feature distillation module that learns to translate event features into the image-feature space with self-supervision. Our framework exploits the higher temporal resolution of events by sub-sampling the input event streams using a sliding window, enriching our combined feature representation. Our proposed approach surpasses SoTA multi-frame HDR reconstruction methods using synthetic and real events, with a 2dB and 1dB improvement in PSNR-L and PSNR-mu on the HdM HDR dataset, respectively.
Self-supervised HDR Imaging from Motion and Exposure Cues
Mar 23, 2022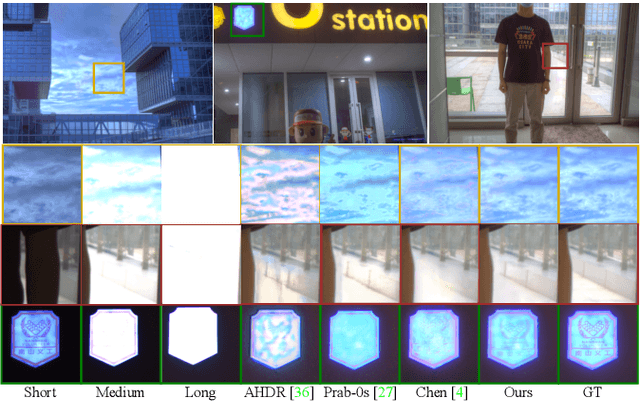
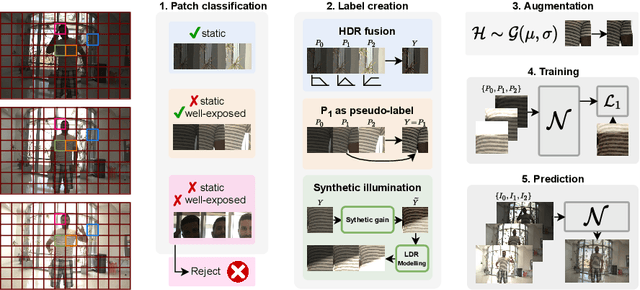
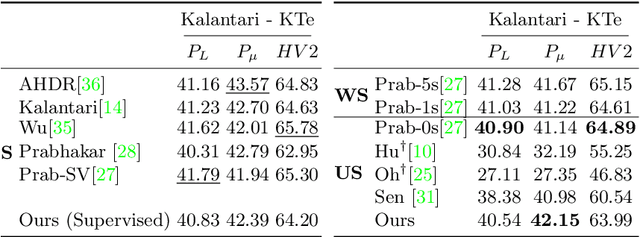
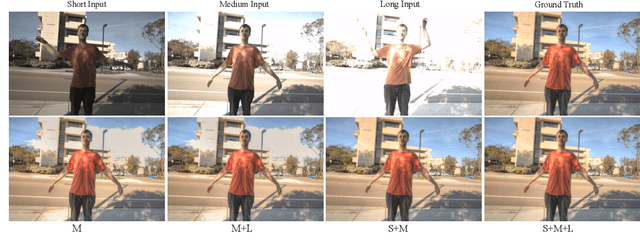
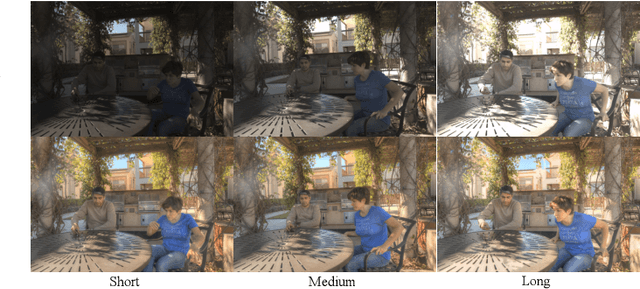
Recent High Dynamic Range (HDR) techniques extend the capabilities of current cameras where scenes with a wide range of illumination can not be accurately captured with a single low-dynamic-range (LDR) image. This is generally accomplished by capturing several LDR images with varying exposure values whose information is then incorporated into a merged HDR image. While such approaches work well for static scenes, dynamic scenes pose several challenges, mostly related to the difficulty of finding reliable pixel correspondences. Data-driven approaches tackle the problem by learning an end-to-end mapping with paired LDR-HDR training data, but in practice generating such HDR ground-truth labels for dynamic scenes is time-consuming and requires complex procedures that assume control of certain dynamic elements of the scene (e.g. actor pose) and repeatable lighting conditions (stop-motion capturing). In this work, we propose a novel self-supervised approach for learnable HDR estimation that alleviates the need for HDR ground-truth labels. We propose to leverage the internal statistics of LDR images to create HDR pseudo-labels. We separately exploit static and well-exposed parts of the input images, which in conjunction with synthetic illumination clipping and motion augmentation provide high quality training examples. Experimental results show that the HDR models trained using our proposed self-supervision approach achieve performance competitive with those trained under full supervision, and are to a large extent superior to previous methods that equally do not require any supervision.
FlexHDR: Modelling Alignment and Exposure Uncertainties for Flexible HDR Imaging
Jan 07, 2022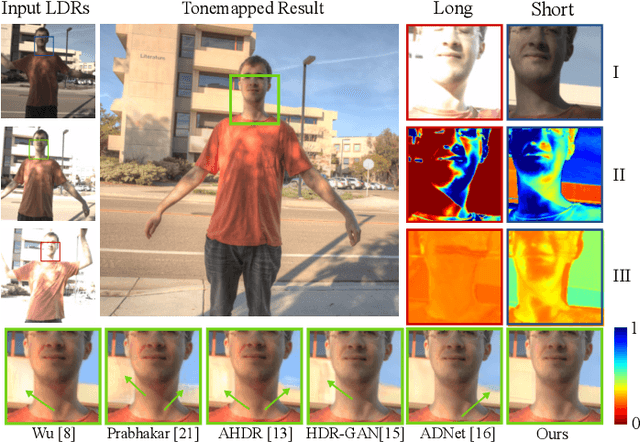
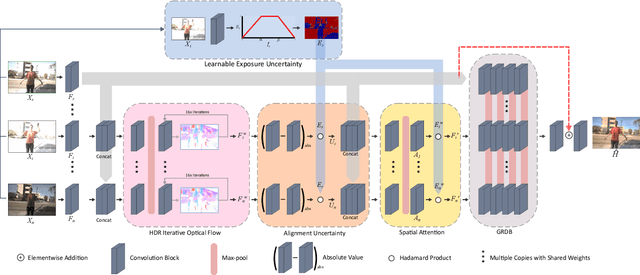
High dynamic range (HDR) imaging is of fundamental importance in modern digital photography pipelines and used to produce a high-quality photograph with well exposed regions despite varying illumination across the image. This is typically achieved by merging multiple low dynamic range (LDR) images taken at different exposures. However, over-exposed regions and misalignment errors due to poorly compensated motion result in artefacts such as ghosting. In this paper, we present a new HDR imaging technique that specifically models alignment and exposure uncertainties to produce high quality HDR results. We introduce a strategy that learns to jointly align and assess the alignment and exposure reliability using an HDR-aware, uncertainty-driven attention map that robustly merges the frames into a single high quality HDR image. Further, we introduce a progressive, multi-stage image fusion approach that can flexibly merge any number of LDR images in a permutation-invariant manner. Experimental results show our method can produce better quality HDR images with up to 0.8dB PSNR improvement to the state-of-the-art, and subjective improvements in terms of better detail, colours, and fewer artefacts.
NTIRE 2021 Challenge on High Dynamic Range Imaging: Dataset, Methods and Results
Jun 02, 2021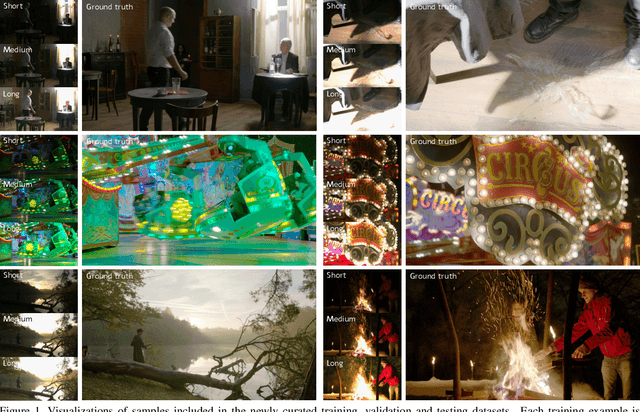
This paper reviews the first challenge on high-dynamic range (HDR) imaging that was part of the New Trends in Image Restoration and Enhancement (NTIRE) workshop, held in conjunction with CVPR 2021. This manuscript focuses on the newly introduced dataset, the proposed methods and their results. The challenge aims at estimating a HDR image from one or multiple respective low-dynamic range (LDR) observations, which might suffer from under- or over-exposed regions and different sources of noise. The challenge is composed by two tracks: In Track 1 only a single LDR image is provided as input, whereas in Track 2 three differently-exposed LDR images with inter-frame motion are available. In both tracks, the ultimate goal is to achieve the best objective HDR reconstruction in terms of PSNR with respect to a ground-truth image, evaluated both directly and with a canonical tonemapping operation.