 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCRREAM : SCan, Register, REnder And Map:A Framework for Annotating Accurate and Dense 3D Indoor Scenes with a Benchmark
Oct 30, 2024



Traditionally, 3d indoor datasets have generally prioritized scale over ground-truth accuracy in order to obtain improved generalization. However, using these datasets to evaluate dense geometry tasks, such as depth rendering, can be problematic as the meshes of the dataset are often incomplete and may produce wrong ground truth to evaluate the details. In this paper, we propose SCRREAM, a dataset annotation framework that allows annotation of fully dense meshes of objects in the scene and registers camera poses on the real image sequence, which can produce accurate ground truth for both sparse 3D as well as dense 3D tasks. We show the details of the dataset annotation pipeline and showcase four possible variants of datasets that can be obtained from our framework with example scenes, such as indoor reconstruction and SLAM, scene editing & object removal, human reconstruction and 6d pose estimation. Recent pipelines for indoor reconstruction and SLAM serve as new benchmarks. In contrast to previous indoor dataset, our design allows to evaluate dense geometry tasks on eleven sample scenes against accurately rendered ground truth depth maps.
Deformable 3D Gaussian Splatting for Animatable Human Avatars
Dec 22, 2023



Recent advances in neural radiance fields enable novel view synthesis of photo-realistic images in dynamic settings, which can be applied to scenarios with human animation. Commonly used implicit backbones to establish accurate models, however, require many input views and additional annotations such as human masks, UV maps and depth maps. In this work, we propose ParDy-Human (Parameterized Dynamic Human Avatar), a fully explicit approach to construct a digital avatar from as little as a single monocular sequence. ParDy-Human introduces parameter-driven dynamics into 3D Gaussian Splatting where 3D Gaussians are deformed by a human pose model to animate the avatar. Our method is composed of two parts: A first module that deforms canonical 3D Gaussians according to SMPL vertices and a consecutive module that further takes their designed joint encodings and predicts per Gaussian deformations to deal with dynamics beyond SMPL vertex deformations. Images are then synthesized by a rasterizer. ParDy-Human constitutes an explicit model for realistic dynamic human avatars which requires significantly fewer training views and images. Our avatars learning is free of additional annotations such as masks and can be trained with variable backgrounds while inferring full-resolution images efficiently even on consumer hardware. We provide experimental evidence to show that ParDy-Human outperforms state-of-the-art methods on ZJU-MoCap and THUman4.0 datasets both quantitatively and visually.
Multi-Modal Dataset Acquisition for Photometrically Challenging Object
Aug 21, 2023This paper addresses the limitations of current datasets for 3D vision tasks in terms of accuracy, size, realism, and suitable imaging modalities for photometrically challenging objects. We propose a novel annotation and acquisition pipeline that enhances existing 3D perception and 6D object pose datasets. Our approach integrates robotic forward-kinematics, external infrared trackers, and improved calibration and annotation procedures. We present a multi-modal sensor rig, mounted on a robotic end-effector, and demonstrate how it is integrated into the creation of highly accurate datasets. Additionally, we introduce a freehand procedure for wider viewpoint coverage. Both approaches yield high-quality 3D data with accurate object and camera pose annotations. Our methods overcome the limitations of existing datasets and provide valuable resources for 3D vision research.
Polarimetric Information for Multi-Modal 6D Pose Estimation of Photometrically Challenging Objects with Limited Data
Aug 21, 2023



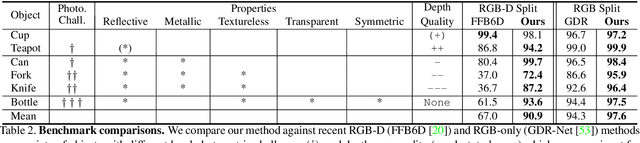
6D pose estimation pipelines that rely on RGB-only or RGB-D data show limitations for photometrically challenging objects with e.g. textureless surfaces, reflections or transparency. A supervised learning-based method utilising complementary polarisation information as input modality is proposed to overcome such limitations. This supervised approach is then extended to a self-supervised paradigm by leveraging physical characteristics of polarised light, thus eliminating the need for annotated real data. The methods achieve significant advancements in pose estimation by leveraging geometric information from polarised light and incorporating shape priors and invertible physical constraints.
Robust Monocular Depth Estimation under Challenging Conditions
Aug 18, 2023



While state-of-the-art monocular depth estimation approaches achieve impressive results in ideal settings, they are highly unreliable under challenging illumination and weather conditions, such as at nighttime or in the presence of rain. In this paper, we uncover these safety-critical issues and tackle them with md4all: a simple and effective solution that works reliably under both adverse and ideal conditions, as well as for different types of learning supervision. We achieve this by exploiting the efficacy of existing methods under perfect settings. Therefore, we provide valid training signals independently of what is in the input. First, we generate a set of complex samples corresponding to the normal training ones. Then, we train the model by guiding its self- or full-supervision by feeding the generated samples and computing the standard losses on the corresponding original images. Doing so enables a single model to recover information across diverse conditions without modifications at inference time. Extensive experiments on two challenging public datasets, namely nuScenes and Oxford RobotCar, demonstrate the effectiveness of our techniques, outperforming prior works by a large margin in both standard and challenging conditions. Source code and data are available at: https://md4all.github.io.
On the Importance of Accurate Geometry Data for Dense 3D Vision Tasks
Mar 26, 2023



Learning-based methods to solve dense 3D vision problems typically train on 3D sensor data. The respectively used principle of measuring distances provides advantages and drawbacks. These are typically not compared nor discussed in the literature due to a lack of multi-modal datasets. Texture-less regions are problematic for structure from motion and stereo, reflective material poses issues for active sensing, and distances for translucent objects are intricate to measure with existing hardware. Training on inaccurate or corrupt data induces model bias and hampers generalisation capabilities. These effects remain unnoticed if the sensor measurement is considered as ground truth during the evaluation. This paper investigates the effect of sensor errors for the dense 3D vision tasks of depth estimation and reconstruction. We rigorously show the significant impact of sensor characteristics on the learned predictions and notice generalisation issues arising from various technologies in everyday household environments. For evaluation, we introduce a carefully designed dataset\footnote{dataset available at https://github.com/Junggy/HAMMER-dataset} comprising measurements from commodity sensors, namely D-ToF, I-ToF, passive/active stereo, and monocular RGB+P. Our study quantifies the considerable sensor noise impact and paves the way to improved dense vision estimates and targeted data fusion.
HouseCat6D -- A Large-Scale Multi-Modal Category Level 6D Object Pose Dataset with Household Objects in Realistic Scenarios
Dec 21, 2022Estimating the 6D pose of objects is one of the major fields in 3D computer vision. Since the promising outcomes from instance-level pose estimation, the research trends are heading towards category-level pose estimation for more practical application scenarios. However, unlike well-established instance-level pose datasets, available category-level datasets lack annotation quality and provided pose quantity. We propose the new category level 6D pose dataset HouseCat6D featuring 1) Multi-modality of Polarimetric RGB+P and Depth, 2) Highly diverse 194 objects of 10 household object categories including 2 photometrically challenging categories, 3) High-quality pose annotation with an error range of only 1.35 mm to 1.74 mm, 4) 41 large scale scenes with extensive viewpoint coverage, 5) Checkerboard-free environment throughout the entire scene. We also provide benchmark results of state-of-the-art category-level pose estimation networks.
PhoCaL: A Multi-Modal Dataset for Category-Level Object Pose Estimation with Photometrically Challenging Objects
May 18, 2022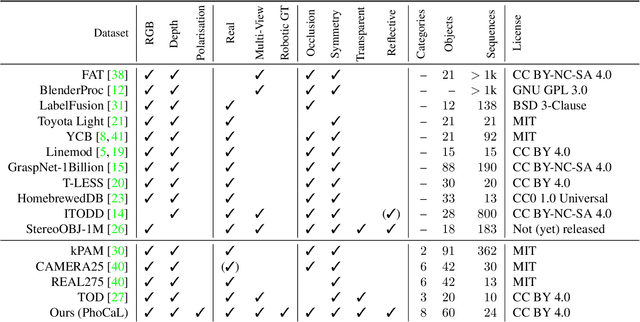

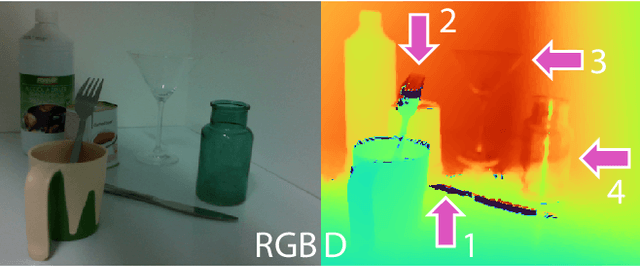
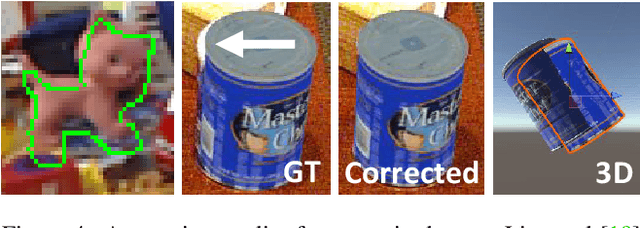
Object pose estimation is crucial for robotic applications and augmented reality. Beyond instance level 6D object pose estimation methods, estimating category-level pose and shape has become a promising trend. As such, a new research field needs to be supported by well-designed datasets. To provide a benchmark with high-quality ground truth annotations to the community, we introduce a multimodal dataset for category-level object pose estimation with photometrically challenging objects termed PhoCaL. PhoCaL comprises 60 high quality 3D models of household objects over 8 categories including highly reflective, transparent and symmetric objects. We developed a novel robot-supported multi-modal (RGB, depth, polarisation) data acquisition and annotation process. It ensures sub-millimeter accuracy of the pose for opaque textured, shiny and transparent objects, no motion blur and perfect camera synchronisation. To set a benchmark for our dataset, state-of-the-art RGB-D and monocular RGB methods are evaluated on the challenging scenes of PhoCaL.
Is my Depth Ground-Truth Good Enough? HAMMER -- Highly Accurate Multi-Modal Dataset for DEnse 3D Scene Regression
May 09, 2022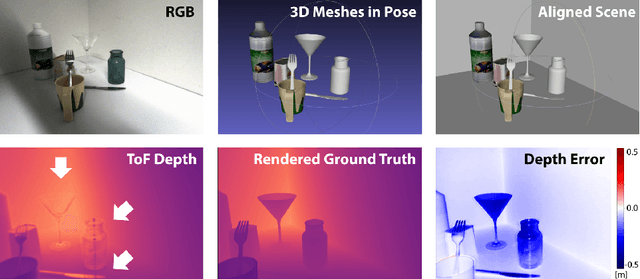
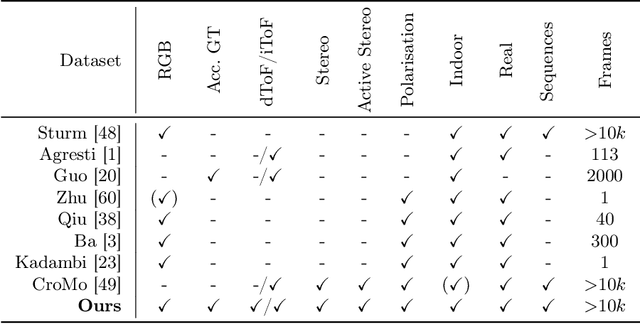
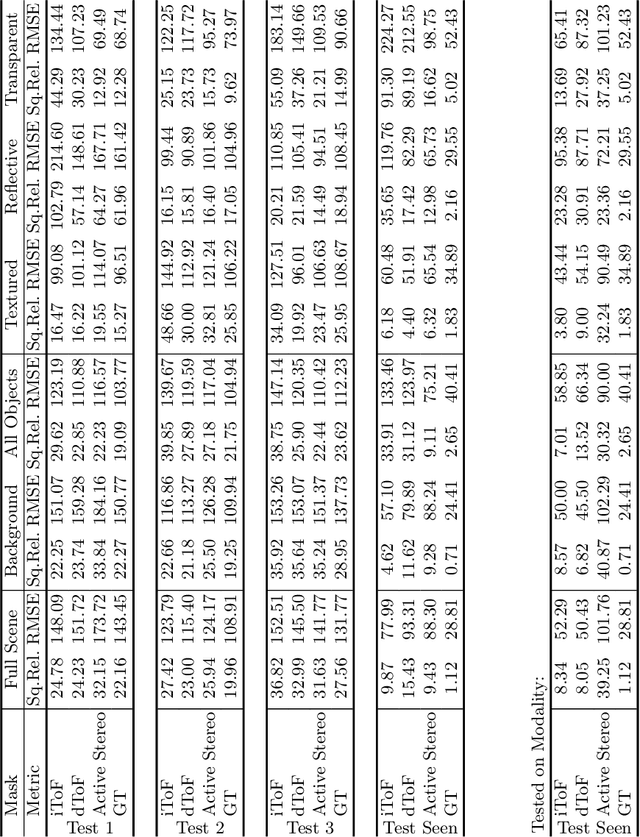
Depth estimation is a core task in 3D computer vision. Recent methods investigate the task of monocular depth trained with various depth sensor modalities. Every sensor has its advantages and drawbacks caused by the nature of estimates. In the literature, mostly mean average error of the depth is investigated and sensor capabilities are typically not discussed. Especially indoor environments, however, pose challenges for some devices. Textureless regions pose challenges for structure from motion, reflective materials are problematic for active sensing, and distances for translucent material are intricate to measure with existing sensors. This paper proposes HAMMER, a dataset comprising depth estimates from multiple commonly used sensors for indoor depth estimation, namely ToF, stereo, structured light together with monocular RGB+P data. We construct highly reliable ground truth depth maps with the help of 3D scanners and aligned renderings. A popular depth estimators is trained on this data and typical depth senosors. The estimates are extensively analyze on different scene structures. We notice generalization issues arising from various sensor technologies in household environments with challenging but everyday scene content. HAMMER, which we make publicly available, provides a reliable base to pave the way to targeted depth improvements and sensor fusion approaches.
Polarimetric Pose Prediction
Dec 07, 2021
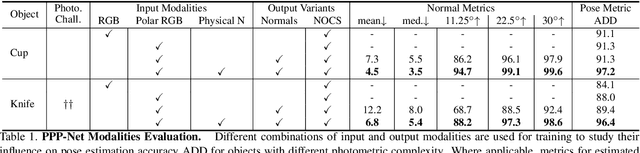
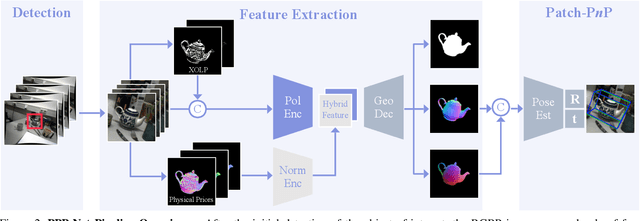
Light has many properties that can be passively measured by vision sensors. Colour-band separated wavelength and intensity are arguably the most commonly used ones for monocular 6D object pose estimation. This paper explores how complementary polarisation information, i.e. the orientation of light wave oscillations, can influence the accuracy of pose predictions. A hybrid model that leverages physical priors jointly with a data-driven learning strategy is designed and carefully tested on objects with different amount of photometric complexity. Our design not only significantly improves the pose accuracy in relation to photometric state-of-the-art approaches, but also enables object pose estimation for highly reflective and transparent objects.