 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Search Agent with One Line of Code
Mar 10, 2026Tool-based Agentic Reinforcement Learning (TARL) has emerged as a promising paradigm for training search agents to interact with external tools for a multi-turn information-seeking process autonomously. However, we identify a critical training instability that leads to catastrophic model collapse: Importance Sampling Distribution Drift(ISDD). In Group Relative Policy Optimization(GRPO), a widely adopted TARL algorithm, ISDD manifests as a precipitous decline in the importance sampling ratios, which nullifies gradient updates and triggers irreversible training failure. To address this, we propose \textbf{S}earch \textbf{A}gent \textbf{P}olicy \textbf{O}ptimization (\textbf{SAPO}), which stabilizes training via a conditional token-level KL constraint. Unlike hard clipping, which ignores distributional divergence, SAPO selectively penalizes the KL divergence between the current and old policies. Crucially, this penalty is applied only to positive tokens with low probabilities where the policy has shifted excessively, thereby preventing distribution drift while preserving gradient flow. Remarkably, SAPO requires only one-line code modification to standard GRPO, ensuring immediate deployability. Extensive experiments across seven QA benchmarks demonstrate that SAPO achieves \textbf{+10.6\% absolute improvement} (+31.5\% relative) over Search-R1, yielding consistent gains across varying model scales (1.5B, 14B) and families (Qwen, LLaMA).
ARGOS: Automated Functional Safety Requirement Synthesis for Embodied AI via Attribute-Guided Combinatorial Reasoning
Jan 30, 2026Ensuring functional safety is essential for the deployment of Embodied AI in complex open-world environments. However, traditional Hazard Analysis and Risk Assessment (HARA) methods struggle to scale in this domain. While HARA relies on enumerating risks for finite and pre-defined function lists, Embodied AI operates on open-ended natural language instructions, creating a challenge of combinatorial interaction risks. Whereas Large Language Models (LLMs) have emerged as a promising solution to this scalability challenge, they often lack physical grounding, yielding semantically superficial and incoherent hazard descriptions. To overcome these limitations, we propose a new framework ARGOS (AttRibute-Guided cOmbinatorial reaSoning), which bridges the gap between open-ended user instructions and concrete physical attributes. By dynamically decomposing entities from instructions into these fine-grained properties, ARGOS grounds LLM reasoning in causal risk factors to generate physically plausible hazard scenarios. It then instantiates abstract safety standards, such as ISO 13482, into context-specific Functional Safety Requirements (FSRs) by integrating these scenarios with robot capabilities. Extensive experiments validate that ARGOS produces high-quality FSRs and outperforms baselines in identifying long-tail risks. Overall, this work paves the way for systematic and grounded functional safety requirement generation, a critical step toward the safe industrial deployment of Embodied AI.
AdaMARP: An Adaptive Multi-Agent Interaction Framework for General Immersive Role-Playing
Jan 16, 2026LLM role-playing aims to portray arbitrary characters in interactive narratives, yet existing systems often suffer from limited immersion and adaptability. They typically under-model dynamic environmental information and assume largely static scenes and casts, offering insufficient support for multi-character orchestration, scene transitions, and on-the-fly character introduction. We propose an adaptive multi-agent role-playing framework, AdaMARP, featuring an immersive message format that interleaves [Thought], (Action), <Environment>, and Speech, together with an explicit Scene Manager that governs role-playing through discrete actions (init_scene, pick_speaker, switch_scene, add_role, end) accompanied by rationales. To train these capabilities, we construct AdaRPSet for the Actor Model and AdaSMSet for supervising orchestration decisions, and introduce AdaptiveBench for trajectory-level evaluation. Experiments across multiple backbones and model scales demonstrate consistent improvements: AdaRPSet enhances character consistency, environment grounding, and narrative coherence, with an 8B actor outperforming several commercial LLMs, while AdaSMSet enables smoother scene transitions and more natural role introductions, surpassing Claude Sonnet 4.5 using only a 14B LLM.
RoleRMBench & RoleRM: Towards Reward Modeling for Profile-Based Role Play in Dialogue Systems
Dec 11, 2025Reward modeling has become a cornerstone of aligning large language models (LLMs) with human preferences. Yet, when extended to subjective and open-ended domains such as role play, existing reward models exhibit severe degradation, struggling to capture nuanced and persona-grounded human judgments. To address this gap, we introduce RoleRMBench, the first systematic benchmark for reward modeling in role-playing dialogue, covering seven fine-grained capabilities from narrative management to role consistency and engagement. Evaluation on RoleRMBench reveals large and consistent gaps between general-purpose reward models and human judgment, particularly in narrative and stylistic dimensions. We further propose RoleRM, a reward model trained with Continuous Implicit Preferences (CIP), which reformulates subjective evaluation as continuous consistent pairwise supervision under multiple structuring strategies. Comprehensive experiments show that RoleRM surpasses strong open- and closed-source reward models by over 24% on average, demonstrating substantial gains in narrative coherence and stylistic fidelity. Our findings highlight the importance of continuous preference representation and annotation consistency, establishing a foundation for subjective alignment in human-centered dialogue systems.
Mapping Urban Villages in China: Progress and Challenges
Mar 18, 2025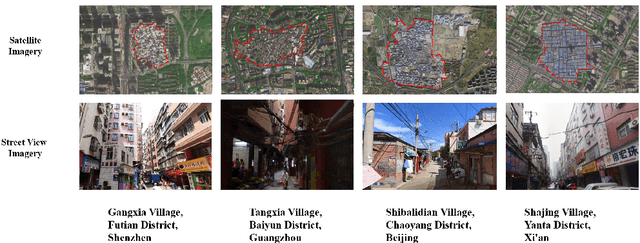
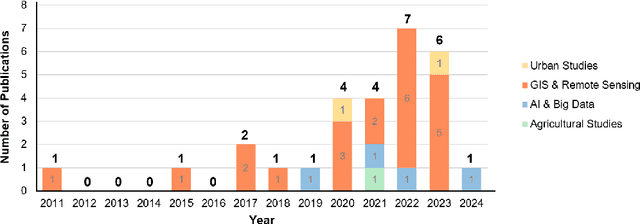
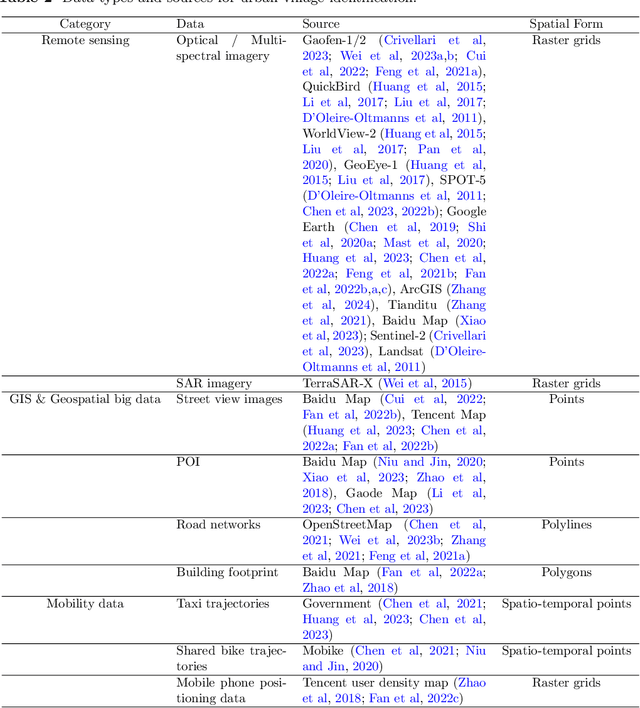
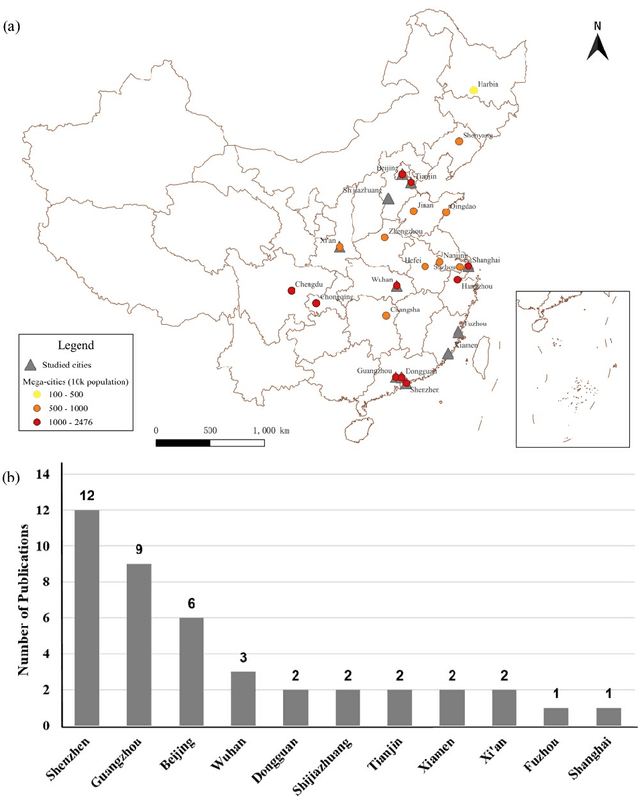
The shift toward high-quality urbanization has brought increased attention to the issue of "urban villages", which has become a prominent social problem in China. However, there is a lack of available geospatial data on urban villages, making it crucial to prioritize urban village mapping. In order to assess the current progress in urban village mapping and identify challenges and future directions, we have conducted a comprehensive review, which to the best of our knowledge is the first of its kind in this field. Our review begins by providing a clear context for urban villages and elaborating the method for literature review, then summarizes the study areas, data sources, and approaches used for urban village mapping in China. We also address the challenges and future directions for further research. Through thorough investigation, we find that current studies only cover very limited study areas and periods and lack sufficient investigation into the scalability, transferability, and interpretability of identification approaches due to the challenges in concept fuzziness and variances, spatial heterogeneity and variances of urban villages, and data availability. Future research can complement and further the current research in the following potential directions in order to achieve large-area mapping across the whole nation...
* Updated review at https://github.com/rui-research/urban-village-review
Interpreting core forms of urban morphology linked to urban functions with explainable graph neural network
Feb 22, 2025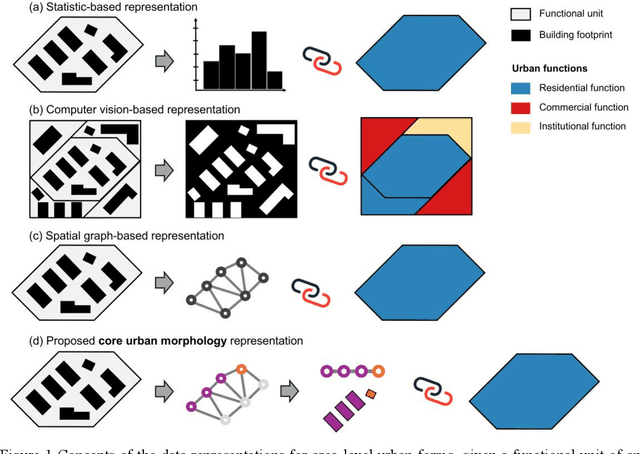
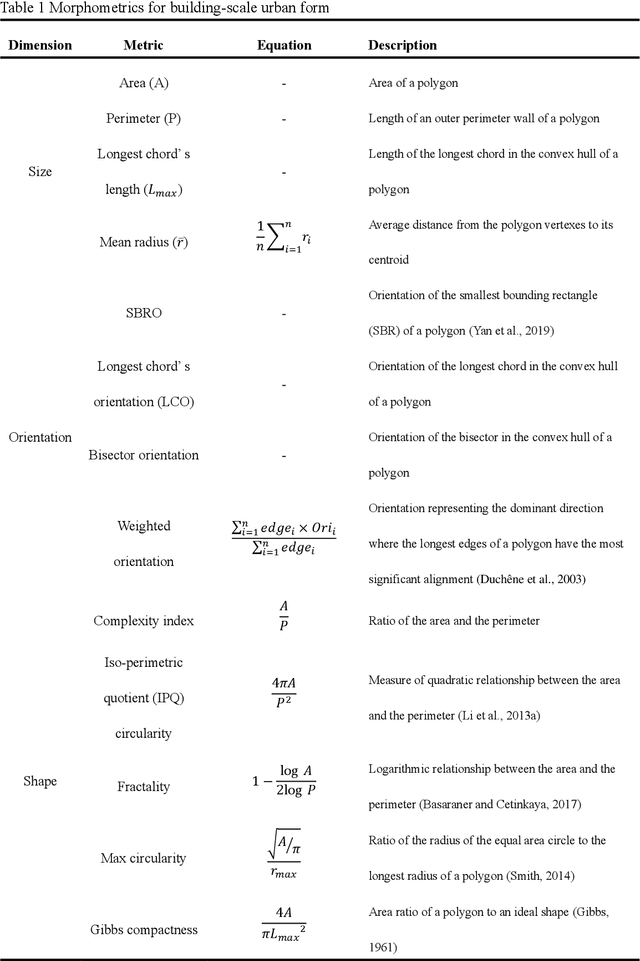
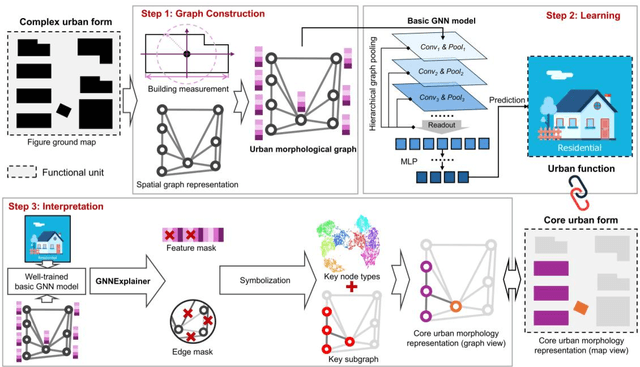
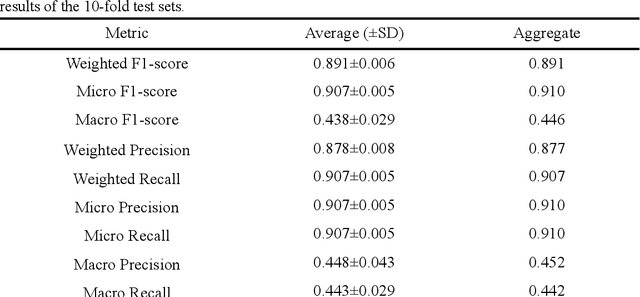
Understanding the high-order relationship between urban form and function is essential for modeling the underlying mechanisms of sustainable urban systems. Nevertheless, it is challenging to establish an accurate data representation for complex urban forms that are readily explicable in human terms. This study proposed the concept of core urban morphology representation and developed an explainable deep learning framework for explicably symbolizing complex urban forms into the novel representation, which we call CoMo. By interpretating the well-trained deep learning model with a stable weighted F1-score of 89.14%, CoMo presents a promising approach for revealing links between urban function and urban form in terms of core urban morphology representation. Using Boston as a study area, we analyzed the core urban forms at the individual-building, block, and neighborhood level that are important to corresponding urban functions. The residential core forms follow a gradual morphological pattern along the urban spine, which is consistent with a center-urban-suburban transition. Furthermore, we prove that urban morphology directly affects land use efficiency, which has a significantly strong correlation with the location (R2=0.721, p<0.001). Overall, CoMo can explicably symbolize urban forms, provide evidence for the classic urban location theory, and offer mechanistic insights for digital twins.
Integrating 3D City Data through Knowledge Graphs
Oct 17, 2023CityGML is a widely adopted standard by the Open Geospatial Consortium (OGC) for representing and exchanging 3D city models. The representation of semantic and topological properties in CityGML makes it possible to query such 3D city data to perform analysis in various applications, e.g., security management and emergency response, energy consumption and estimation, and occupancy measurement. However, the potential of querying CityGML data has not been fully exploited. The official GML/XML encoding of CityGML is only intended as an exchange format but is not suitable for query answering. The most common way of dealing with CityGML data is to store them in the 3DCityDB system as relational tables and then query them with the standard SQL query language. Nevertheless, for end users, it remains a challenging task to formulate queries over 3DCityDB directly for their ad-hoc analytical tasks, because there is a gap between the conceptual semantics of CityGML and the relational schema adopted in 3DCityDB. In fact, the semantics of CityGML itself can be modeled as a suitable ontology. The technology of Knowledge Graphs (KGs), where an ontology is at the core, is a good solution to bridge such a gap. Moreover, embracing KGs makes it easier to integrate with other spatial data sources, e.g., OpenStreetMap and existing (Geo)KGs (e.g., Wikidata, DBPedia, and GeoNames), and to perform queries combining information from multiple data sources. In this work, we describe a CityGML KG framework to populate the concepts in the CityGML ontology using declarative mappings to 3DCityDB, thus exposing the CityGML data therein as a KG. To demonstrate the feasibility of our approach, we use CityGML data from the city of Munich as test data and integrate OpenStreeMap data in the same area.
NIPD: A Federated Learning Person Detection Benchmark Based on Real-World Non-IID Data
Jun 28, 2023Federated learning (FL), a privacy-preserving distributed machine learning, has been rapidly applied in wireless communication networks. FL enables Internet of Things (IoT) clients to obtain well-trained models while preventing privacy leakage. Person detection can be deployed on edge devices with limited computing power if combined with FL to process the video data directly at the edge. However, due to the different hardware and deployment scenarios of different cameras, the data collected by the camera present non-independent and identically distributed (non-IID), and the global model derived from FL aggregation is less effective. Meanwhile, existing research lacks public data set for real-world FL object detection, which is not conducive to studying the non-IID problem on IoT cameras. Therefore, we open source a non-IID IoT person detection (NIPD) data set, which is collected from five different cameras. To our knowledge, this is the first true device-based non-IID person detection data set. Based on this data set, we explain how to establish a FL experimental platform and provide a benchmark for non-IID person detection. NIPD is expected to promote the application of FL and the security of smart city.
TLAG: An Informative Trigger and Label-Aware Knowledge Guided Model for Dialogue-based Relation Extraction
Mar 30, 2023Dialogue-based Relation Extraction (DRE) aims to predict the relation type of argument pairs that are mentioned in dialogue. The latest trigger-enhanced methods propose trigger prediction tasks to promote DRE. However, these methods are not able to fully leverage the trigger information and even bring noise to relation extraction. To solve these problems, we propose TLAG, which fully leverages the trigger and label-aware knowledge to guide the relation extraction. First, we design an adaptive trigger fusion module to fully leverage the trigger information. Then, we introduce label-aware knowledge to further promote our model's performance. Experimental results on the DialogRE dataset show that our TLAG outperforms the baseline models, and detailed analyses demonstrate the effectiveness of our approach.
Energy-Efficient UAV-Sensor Data Harvesting: Dynamic Adaptive Modulation and Height Control
Jan 28, 2022Leveraging unmanned aerial vehicle (UAV) is convenient to collect data from ground sensor. However, in the presence of unknown urban environment, the data collection is subject to the blockage of urban buildings. In this paper, considering the urban environment during flight, we propose dynamic adaptive modulation and height control for UAV-sensor data harvesting in urban areas. In each time slot, the modulation format and flight height are selected based on current system states, with the aim of minimizing the expected transmission energy of sensor under data volume and flight height constraints. The dynamic adaptive modulation and height control problem is formulated as constrained finite-horizon Markov decision processes (CMDP), which can be solved by backward induction algorithm. The advantage of proposed joint design over modulation selection only is illustrated via the computer simulations, where 48.23% expected transmission energy can be saved for ground sensor.