 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact of Cognitive Load on Human Trust in Hybrid Human-Robot Collaboration
Dec 30, 2024Human trust plays a crucial role in the effectiveness of human-robot collaboration. Despite its significance, the development and maintenance of an optimal trust level are obstructed by the complex nature of influencing factors and their mechanisms. This study investigates the effects of cognitive load on human trust within the context of a hybrid human-robot collaboration task. An experiment is conducted where the humans and the robot, acting as team members, collaboratively construct pyramids with differentiated levels of task complexity. Our findings reveal that cognitive load exerts diverse impacts on human trust in the robot. Notably, there is an increase in human trust under conditions of high cognitive load. Furthermore, the rewards for performance are substantially higher in tasks with high cognitive load compared to those with low cognitive load, and a significant correlation exists between human trust and the failure risk of performance in tasks with low and medium cognitive load. By integrating interdependent task steps, this research emphasizes the unique dynamics of hybrid human-robot collaboration scenarios. The insights gained not only contribute to understanding how cognitive load influences trust but also assist developers in optimizing collaborative target selection and designing more effective human-robot interfaces in such environments.
NIPD: A Federated Learning Person Detection Benchmark Based on Real-World Non-IID Data
Jun 28, 2023Federated learning (FL), a privacy-preserving distributed machine learning, has been rapidly applied in wireless communication networks. FL enables Internet of Things (IoT) clients to obtain well-trained models while preventing privacy leakage. Person detection can be deployed on edge devices with limited computing power if combined with FL to process the video data directly at the edge. However, due to the different hardware and deployment scenarios of different cameras, the data collected by the camera present non-independent and identically distributed (non-IID), and the global model derived from FL aggregation is less effective. Meanwhile, existing research lacks public data set for real-world FL object detection, which is not conducive to studying the non-IID problem on IoT cameras. Therefore, we open source a non-IID IoT person detection (NIPD) data set, which is collected from five different cameras. To our knowledge, this is the first true device-based non-IID person detection data set. Based on this data set, we explain how to establish a FL experimental platform and provide a benchmark for non-IID person detection. NIPD is expected to promote the application of FL and the security of smart city.
Detecting and Correcting IMU Movements During Joint Angle Estimation
Jun 09, 2021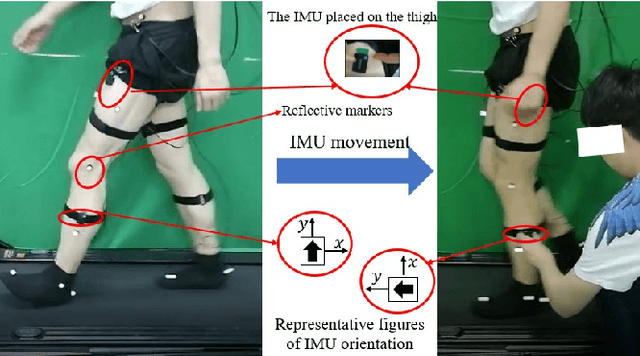
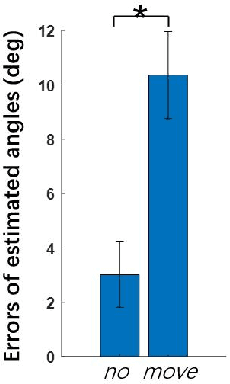
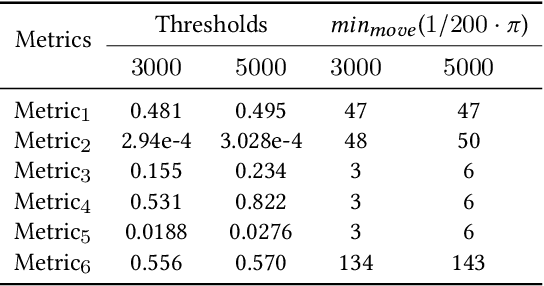
Inertial measurement units (IMUs) increasingly function as a basic component of wearable sensor network (WSN)systems. IMU-based joint angle estimation (JAE) is a relatively typical usage of IMUs, with extensive applications. However, the issue that IMUs move with respect to their original placement during JAE is still a research gap, and limits the robustness of deploying the technique in real-world application scenarios. In this study, we propose to detect and correct the IMU movement online in a relatively computationally lightweight manner. Particularly, we first experimentally investigate the influence of IMU movements. Second, we design the metrics for detecting IMU movements by mathematically formulating how the IMU movement affects the IMU measurements. Third, we determine the optimal thresholds of metrics by synthetic IMU data from a significantly amended simulation model. Finally, a correction method is proposed to correct the effects of IMU movements. We demonstrate our method on both synthetic data and real-user data. The results demonstrate our method is a promising solution to detecting and correcting IMU movements during JAE.
Continuous Prediction of Lower-Limb Kinematics From Multi-Modal Biomedical Signals
Mar 22, 2021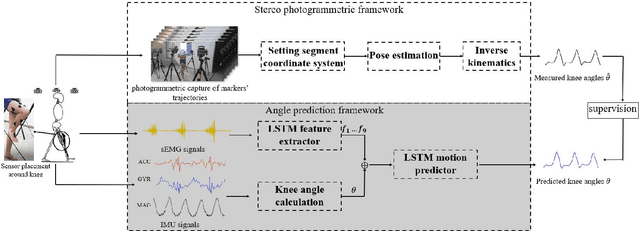
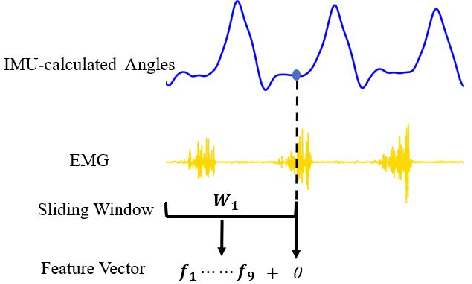
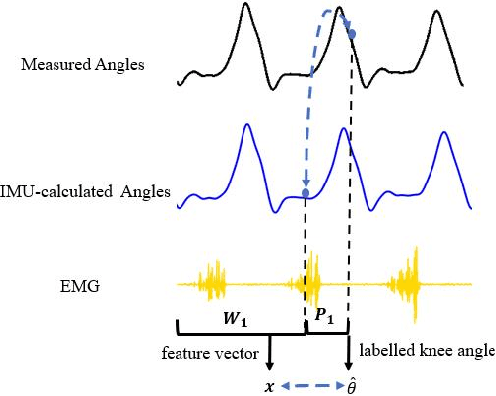
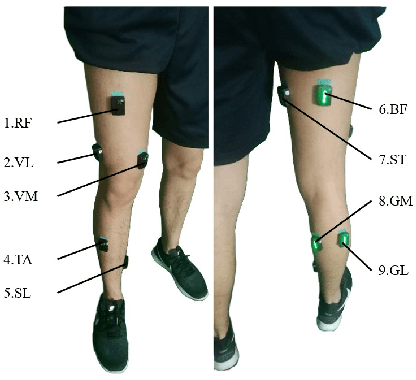
The fast-growing techniques of measuring and fusing multi-modal biomedical signals enable advanced motor intent decoding schemes of lowerlimb exoskeletons, meeting the increasing demand for rehabilitative or assistive applications of take-home healthcare. Challenges of exoskeletons motor intent decoding schemes remain in making a continuous prediction to compensate for the hysteretic response caused by mechanical transmission. In this paper, we solve this problem by proposing an ahead of time continuous prediction of lower limb kinematics, with the prediction of knee angles during level walking as a case study. Firstly, an end-to-end kinematics prediction network(KinPreNet), consisting of a feature extractor and an angle predictor, is proposed and experimentally compared with features and methods traditionally used in ahead-of-time prediction of gait phases. Secondly, inspired by the electromechanical delay(EMD), we further explore our algorithm's capability of compensating response delay of mechanical transmission by validating the performance of the different sections of prediction time. And we experimentally reveal the time boundary of compensating the hysteretic response. Thirdly, a comparison of employing EMG signals or not is performed to reveal the EMG and kinematic signals collaborated contributions to the continuous prediction. During the experiments, EMG signals of nine muscles and knee angles calculated from inertial measurement unit (IMU) signals are recorded from ten healthy subjects. To the best of our knowledge, this is the first study of continuously predicting lower-limb kinematics in an ahead-of-time manner based on the electromechanical delay (EMD).
Multifunction Cognitive Radar Task Scheduling Using Monte Carlo Tree Search and Policy Networks
May 18, 2018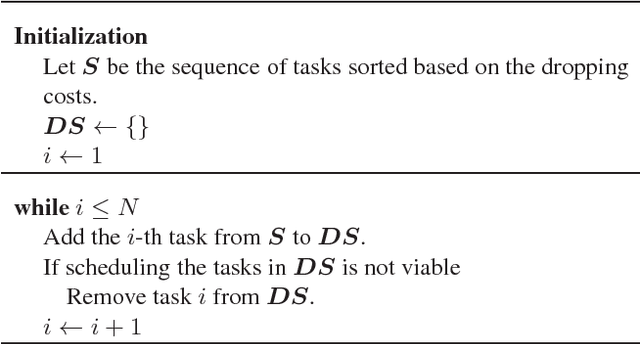

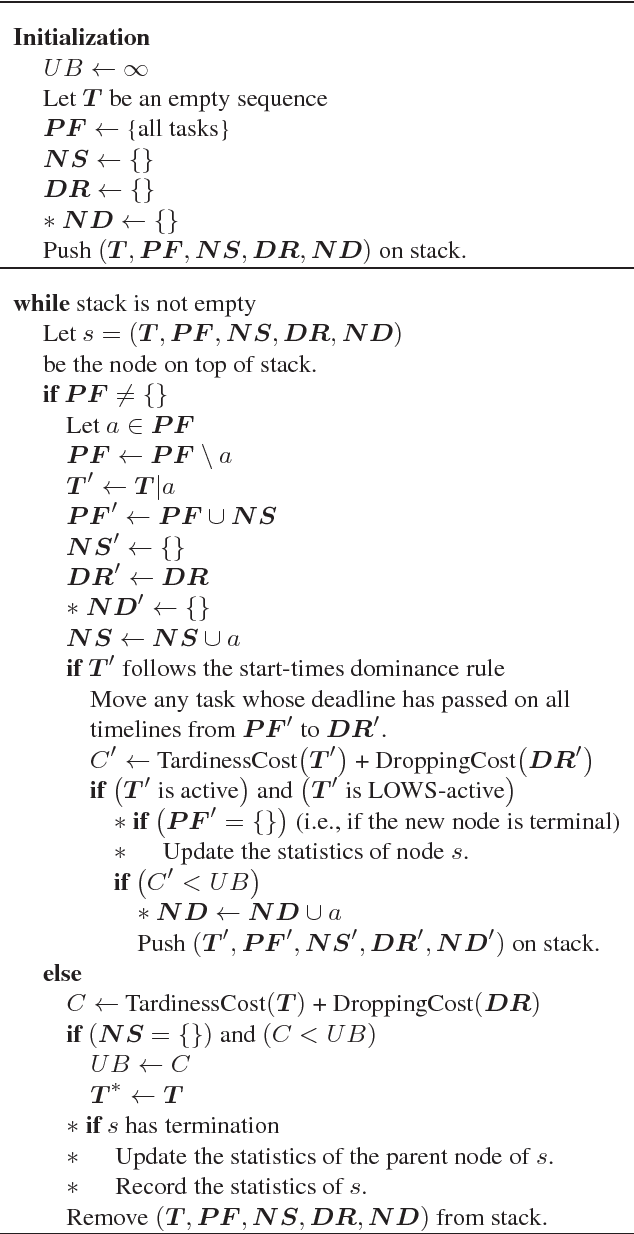
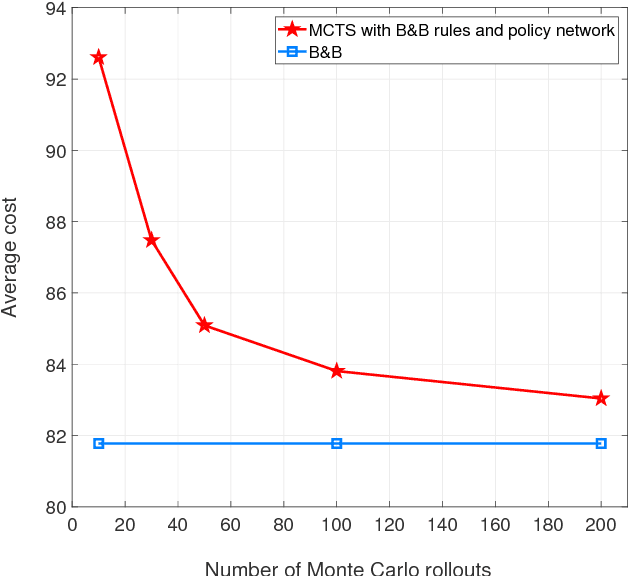
A modern radar may be designed to perform multiple functions, such as surveillance, tracking, and fire control. Each function requires the radar to execute a number of transmit-receive tasks. A radar resource management (RRM) module makes decisions on parameter selection, prioritization, and scheduling of such tasks. RRM becomes especially challenging in overload situations, where some tasks may need to be delayed or even dropped. In general, task scheduling is an NP-hard problem. In this work, we develop the branch-and-bound (B&B) method which obtains the optimal solution but at exponential computational complexity. On the other hand, heuristic methods have low complexity but provide relatively poor performance. We resort to machine learning-based techniques to address this issue; specifically we propose an approximate algorithm based on the Monte Carlo tree search method. Along with using bound and dominance rules to eliminate nodes from the search tree, we use a policy network to help to reduce the width of the search. Such a network can be trained using solutions obtained by running the B&B method offline on problems with feasible complexity. We show that the proposed method provides near-optimal performance, but with computational complexity orders of magnitude smaller than the B&B algorithm.