 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Object Categories: Multi-Attribute Reference Understanding for Visual Grounding
Mar 25, 2025



Referring expression comprehension (REC) aims at achieving object localization based on natural language descriptions. However, existing REC approaches are constrained by object category descriptions and single-attribute intention descriptions, hindering their application in real-world scenarios. In natural human-robot interactions, users often express their desires through individual states and intentions, accompanied by guiding gestures, rather than detailed object descriptions. To address this challenge, we propose Multi-ref EC, a novel task framework that integrates state descriptions, derived intentions, and embodied gestures to locate target objects. We introduce the State-Intention-Gesture Attributes Reference (SIGAR) dataset, which combines state and intention expressions with embodied references. Through extensive experiments with various baseline models on SIGAR, we demonstrate that properly ordered multi-attribute references contribute to improved localization performance, revealing that single-attribute reference is insufficient for natural human-robot interaction scenarios. Our findings underscore the importance of multi-attribute reference expressions in advancing visual-language understanding.
Impact of Cognitive Load on Human Trust in Hybrid Human-Robot Collaboration
Dec 30, 2024Human trust plays a crucial role in the effectiveness of human-robot collaboration. Despite its significance, the development and maintenance of an optimal trust level are obstructed by the complex nature of influencing factors and their mechanisms. This study investigates the effects of cognitive load on human trust within the context of a hybrid human-robot collaboration task. An experiment is conducted where the humans and the robot, acting as team members, collaboratively construct pyramids with differentiated levels of task complexity. Our findings reveal that cognitive load exerts diverse impacts on human trust in the robot. Notably, there is an increase in human trust under conditions of high cognitive load. Furthermore, the rewards for performance are substantially higher in tasks with high cognitive load compared to those with low cognitive load, and a significant correlation exists between human trust and the failure risk of performance in tasks with low and medium cognitive load. By integrating interdependent task steps, this research emphasizes the unique dynamics of hybrid human-robot collaboration scenarios. The insights gained not only contribute to understanding how cognitive load influences trust but also assist developers in optimizing collaborative target selection and designing more effective human-robot interfaces in such environments.
Effects of Muscle Synergy during Overhead Work with a Passive Shoulder Exoskeleton: A Case Study
Nov 23, 2024Objective: Shoulder exoskeletons can effectively assist with overhead work. However, their impacts on muscle synergy remain unclear. The objective is to systematically investigate the effects of the shoulder exoskeleton on muscle synergies during overhead work.Methods: Eight male participants were recruited to perform a screwing task both with (Intervention) and without (Normal) the exoskeleton. Eight muscles were monitored and muscle synergies were extracted using non-negative matrix factorization and electromyographic topographic maps. Results: The number of synergies extracted was the same (n = 2) in both conditions. Specifically, the first synergies in both conditions were identical, with the highest weight of AD and MD; while the second synergies were different between conditions, with highest weight of PM and MD, respectively. As for the first synergy in the Intervention condition, the activation profile significantly decreased, and the average recruitment level and activation duration were significantly lower (p<0.05). The regression analysis for the muscle synergies across conditions shows the changes of muscle synergies did not influence the sparseness of muscle synergies (p=0.7341). In the topographic maps, the mean value exhibited a significant decrease (p<0.001) and the entropy significantly increased (p<0.01). Conclusion: The exoskeleton does not alter the number of synergies and existing major synergies but may induce new synergies. It can also significantly decrease neural activation and may influence the heterogeneity of the distribution of monitored muscle activations. Significance: This study provides insights into the potential mechanisms of exoskeleton-assisted overhead work and guidance on improving the performance of exoskeletons.
A Novel Passive Occupational Shoulder Exoskeleton With Adjustable Peak Assistive Torque Angle For Overhead Tasks
Nov 21, 2024Objective: Overhead tasks are a primary inducement to work-related musculoskeletal disorders. Aiming to reduce shoulder physical loads, passive shoulder exoskeletons are increasingly prevalent in the industry due to their lightweight, affordability, and effectiveness. However, they can only handle specific tasks and struggle to balance compactness with a sufficient range of motion effectively. Method: We proposed a novel passive occupational shoulder exoskeleton designed to handle various overhead tasks at different arm elevation angles, ensuring sufficient ROM while maintaining compactness. By formulating kinematic models and simulations, an ergonomic shoulder structure was developed. Then, we presented a torque generator equipped with an adjustable peak assistive torque angle to switch between low and high assistance phases through a passive clutch mechanism. Ten healthy participants were recruited to validate its functionality by performing the screwing task. Results: Measured range of motion results demonstrated that the exoskeleton can ensure a sufficient ROM in both sagittal (164$^\circ$) and horizontal (158$^\circ$) flexion/extension movements. The experimental results of the screwing task showed that the exoskeleton could reduce muscle activation (up to 49.6%), perceived effort and frustration, and provide an improved user experience (scored 79.7 out of 100). Conclusion: These results indicate that the proposed exoskeleton can guarantee natural movements and provide efficient assistance during overhead work, and thus have the potential to reduce the risk of musculoskeletal disorders. Significance: The proposed exoskeleton provides insights into multi-task adaptability and efficient assistance, highlighting the potential for expanding the application of exoskeletons.
AD-DINO: Attention-Dynamic DINO for Distance-Aware Embodied Reference Understanding
Nov 13, 2024Embodied reference understanding is crucial for intelligent agents to predict referents based on human intention through gesture signals and language descriptions. This paper introduces the Attention-Dynamic DINO, a novel framework designed to mitigate misinterpretations of pointing gestures across various interaction contexts. Our approach integrates visual and textual features to simultaneously predict the target object's bounding box and the attention source in pointing gestures. Leveraging the distance-aware nature of nonverbal communication in visual perspective taking, we extend the virtual touch line mechanism and propose an attention-dynamic touch line to represent referring gesture based on interactive distances. The combination of this distance-aware approach and independent prediction of the attention source, enhances the alignment between objects and the gesture represented line. Extensive experiments on the YouRefIt dataset demonstrate the efficacy of our gesture information understanding method in significantly improving task performance. Our model achieves 76.4% accuracy at the 0.25 IoU threshold and, notably, surpasses human performance at the 0.75 IoU threshold, marking a first in this domain. Comparative experiments with distance-unaware understanding methods from previous research further validate the superiority of the Attention-Dynamic Touch Line across diverse contexts.
BDEC:Brain Deep Embedded Clustering model
Sep 12, 2023An essential premise for neuroscience brain network analysis is the successful segmentation of the cerebral cortex into functionally homogeneous regions. Resting-state functional magnetic resonance imaging (rs-fMRI), capturing the spontaneous activities of the brain, provides the potential for cortical parcellation. Previous parcellation methods can be roughly categorized into three groups, mainly employing either local gradient, global similarity, or a combination of both. The traditional clustering algorithms, such as "K-means" and "Spectral clustering" may affect the reproducibility or the biological interpretation of parcellations; The region growing-based methods influence the expression of functional homogeneity in the brain at a large scale; The parcellation method based on probabilistic graph models inevitably introduce model assumption biases. In this work, we develop an assumption-free model called as BDEC, which leverages the robust data fitting capability of deep learning. To the best of our knowledge, this is the first study that uses deep learning algorithm for rs-fMRI-based parcellation. By comparing with nine commonly used brain parcellation methods, the BDEC model demonstrates significantly superior performance in various functional homogeneity indicators. Furthermore, it exhibits favorable results in terms of validity, network analysis, task homogeneity, and generalization capability. These results suggest that the BDEC parcellation captures the functional characteristics of the brain and holds promise for future voxel-wise brain network analysis in the dimensionality reduction of fMRI data.
Estimating Continuous Muscle Fatigue For Multi-Muscle Coordinated Exercise: A Pilot Study
Mar 30, 2023Assessing the progression of muscle fatigue for daily exercises provides vital indicators for precise rehabilitation, personalized training dose, especially under the context of Metaverse. Assessing fatigue of multi-muscle coordination-involved daily exercises requires the neuromuscular features that represent the fatigue-induced characteristics of spatiotemporal adaptions of multiple muscles and the estimator that captures the time-evolving progression of fatigue. In this paper, we propose to depict fatigue by the features of muscle compensation and spinal module activation changes and estimate continuous fatigue by a physiological rationale model. First, we extract muscle synergy fractionation and the variance of spinal module spikings as features inspired by the prior of fatigue-induced neuromuscular adaptations. Second, we treat the features as observations and develop a Bayesian Gaussian process to capture the time-evolving progression. Third, we solve the issue of lacking supervision information by mathematically formulating the time-evolving characteristics of fatigue as the loss function. Finally, we adapt the metrics that follow the physiological principles of fatigue to quantitatively evaluate the performance. Our extensive experiments present a 0.99 similarity between days, a over 0.7 similarity with other views of fatigue and a nearly 1 weak monotonicity, which outperform other methods. This study would aim the objective assessment of muscle fatigue.
Detecting and Correcting IMU Movements During Joint Angle Estimation
Jun 09, 2021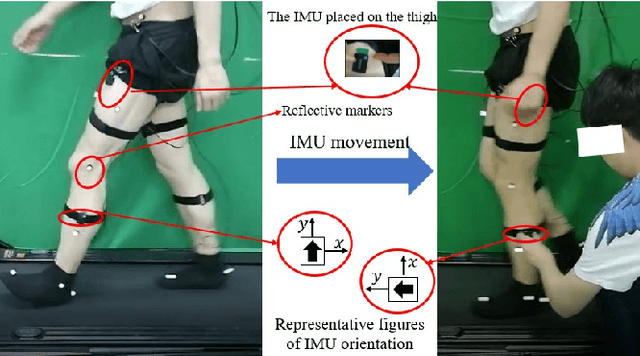
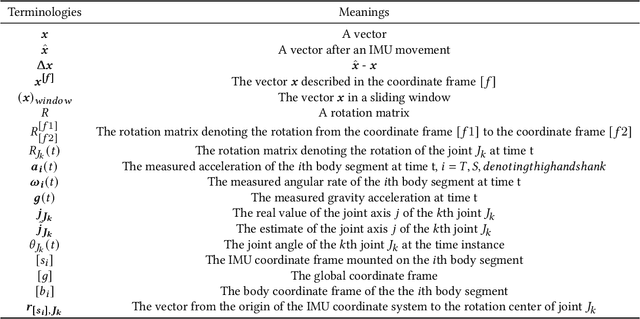
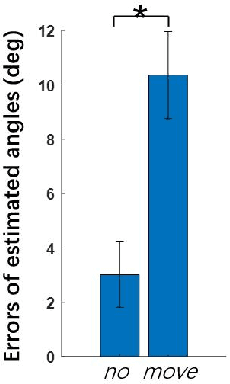
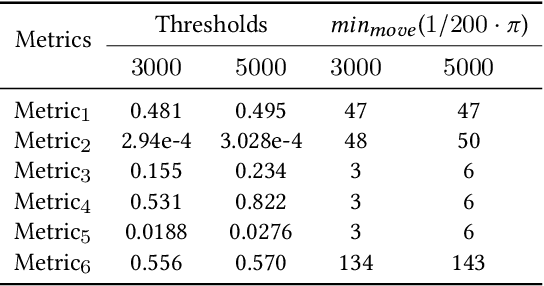
Inertial measurement units (IMUs) increasingly function as a basic component of wearable sensor network (WSN)systems. IMU-based joint angle estimation (JAE) is a relatively typical usage of IMUs, with extensive applications. However, the issue that IMUs move with respect to their original placement during JAE is still a research gap, and limits the robustness of deploying the technique in real-world application scenarios. In this study, we propose to detect and correct the IMU movement online in a relatively computationally lightweight manner. Particularly, we first experimentally investigate the influence of IMU movements. Second, we design the metrics for detecting IMU movements by mathematically formulating how the IMU movement affects the IMU measurements. Third, we determine the optimal thresholds of metrics by synthetic IMU data from a significantly amended simulation model. Finally, a correction method is proposed to correct the effects of IMU movements. We demonstrate our method on both synthetic data and real-user data. The results demonstrate our method is a promising solution to detecting and correcting IMU movements during JAE.
Continuous Prediction of Lower-Limb Kinematics From Multi-Modal Biomedical Signals
Mar 22, 2021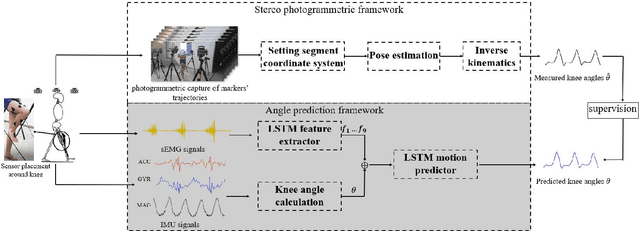
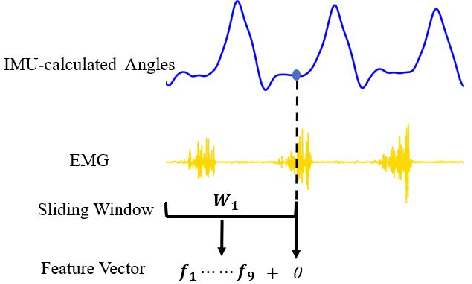
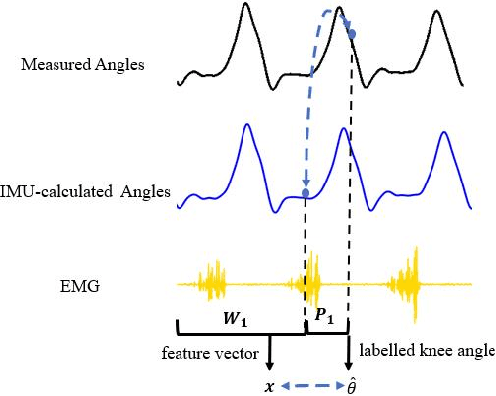
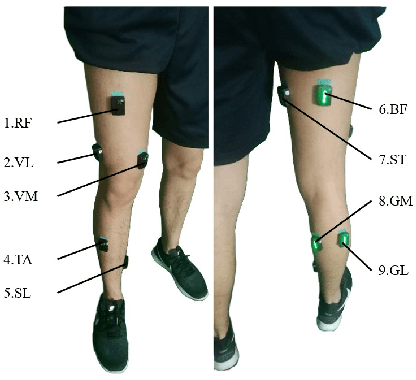
The fast-growing techniques of measuring and fusing multi-modal biomedical signals enable advanced motor intent decoding schemes of lowerlimb exoskeletons, meeting the increasing demand for rehabilitative or assistive applications of take-home healthcare. Challenges of exoskeletons motor intent decoding schemes remain in making a continuous prediction to compensate for the hysteretic response caused by mechanical transmission. In this paper, we solve this problem by proposing an ahead of time continuous prediction of lower limb kinematics, with the prediction of knee angles during level walking as a case study. Firstly, an end-to-end kinematics prediction network(KinPreNet), consisting of a feature extractor and an angle predictor, is proposed and experimentally compared with features and methods traditionally used in ahead-of-time prediction of gait phases. Secondly, inspired by the electromechanical delay(EMD), we further explore our algorithm's capability of compensating response delay of mechanical transmission by validating the performance of the different sections of prediction time. And we experimentally reveal the time boundary of compensating the hysteretic response. Thirdly, a comparison of employing EMG signals or not is performed to reveal the EMG and kinematic signals collaborated contributions to the continuous prediction. During the experiments, EMG signals of nine muscles and knee angles calculated from inertial measurement unit (IMU) signals are recorded from ten healthy subjects. To the best of our knowledge, this is the first study of continuously predicting lower-limb kinematics in an ahead-of-time manner based on the electromechanical delay (EMD).