 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePostureObjectstitch: Anomaly Image Generation Considering Assembly Relationships in Industrial Scenarios
Apr 15, 2026Image generation technology can synthesize condition-specific images to supplement real-world industrial anomaly data and enhance anomaly detection model performance. Existing generation techniques rarely account for the pose and orientation of industrial components in assembly, making the generated images difficult to utilize for downstream application. To solve this, we propose a novel image synthesis approach, called PostureObjectStitch, that achieves accurate generation to meet the requirement of industrial assembly. A condition decoupling approach is introduced to separate input multi-view images into high-frequency, texture, and RGB features. The feature temporal modulation mechanism adapts these features across diffusion model time-steps, enabling progressive generation from coarse to fine details while maintaining consistency. To ensure semantic accuracy, we introduce a conditional loss that enhances critical industrial elements and a geometric prior that guides component positioning for correct assembly relationships. Comprehensive experimental results on the MureCom dataset, our newly contributed DreamAssembly dataset, and the downstream application validate the outstanding performance of our method.
CAD 100K: A Comprehensive Multi-Task Dataset for Car Related Visual Anomaly Detection
Apr 10, 2026Multi-task visual anomaly detection is critical for car-related manufacturing quality assessment. However, existing methods remain task-specific, hindered by the absence of a unified benchmark for multi-task evaluation. To fill in this gap, We present the CAD Dataset, a large-scale and comprehensive benchmark designed for car-related multi-task visual anomaly detection. The dataset contains over 100 images crossing 7 vehicle domains and 3 tasks, providing models a comprehensive view for car-related anomaly detection. It is the first car-related anomaly dataset specialized for multi-task learning(MTL), while combining synthesis data augmentation for few-shot anomaly images. We implement a multi-task baseline and conduct extensive empirical studies. Results show MTL promotes task interaction and knowledge transfer, while also exposing challenging conflicts between tasks. The CAD dataset serves as a standardized platform to drive future advances in car-related multi-task visual anomaly detection.
GroundingAnomaly: Spatially-Grounded Diffusion for Few-Shot Anomaly Synthesis
Apr 09, 2026The performance of visual anomaly inspection in industrial quality control is often constrained by the scarcity of real anomalous samples. Consequently, anomaly synthesis techniques have been developed to enlarge training sets and enhance downstream inspection. However, existing methods either suffer from poor integration caused by inpainting or fail to provide accurate masks. To address these limitations, we propose GroundingAnomaly, a novel few-shot anomaly image generation framework. Our framework introduces a Spatial Conditioning Module that leverages per-pixel semantic maps to enable precise spatial control over the synthesized anomalies. Furthermore, a Gated Self-Attention Module is designed to inject conditioning tokens into a frozen U-Net via gated attention layers. This carefully preserves pretrained priors while ensuring stable few-shot adaptation. Extensive evaluations on the MVTec AD and VisA datasets demonstrate that GroundingAnomaly generates high-quality anomalies and achieves state-of-the-art performance across multiple downstream tasks, including anomaly detection, segmentation, and instance-level detection.
Milestones in Autonomous Driving and Intelligent Vehicles Part II: Perception and Planning
Jun 03, 2023



Growing interest in autonomous driving (AD) and intelligent vehicles (IVs) is fueled by their promise for enhanced safety, efficiency, and economic benefits. While previous surveys have captured progress in this field, a comprehensive and forward-looking summary is needed. Our work fills this gap through three distinct articles. The first part, a "Survey of Surveys" (SoS), outlines the history, surveys, ethics, and future directions of AD and IV technologies. The second part, "Milestones in Autonomous Driving and Intelligent Vehicles Part I: Control, Computing System Design, Communication, HD Map, Testing, and Human Behaviors" delves into the development of control, computing system, communication, HD map, testing, and human behaviors in IVs. This part, the third part, reviews perception and planning in the context of IVs. Aiming to provide a comprehensive overview of the latest advancements in AD and IVs, this work caters to both newcomers and seasoned researchers. By integrating the SoS and Part I, we offer unique insights and strive to serve as a bridge between past achievements and future possibilities in this dynamic field.
Milestones in Autonomous Driving and Intelligent Vehicles Part \uppercase\expandafter{\romannumeral1}: Control, Computing System Design, Communication, HD Map, Testing, and Human Behaviors
May 12, 2023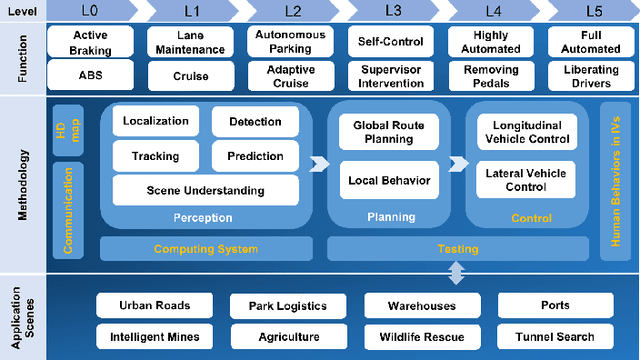
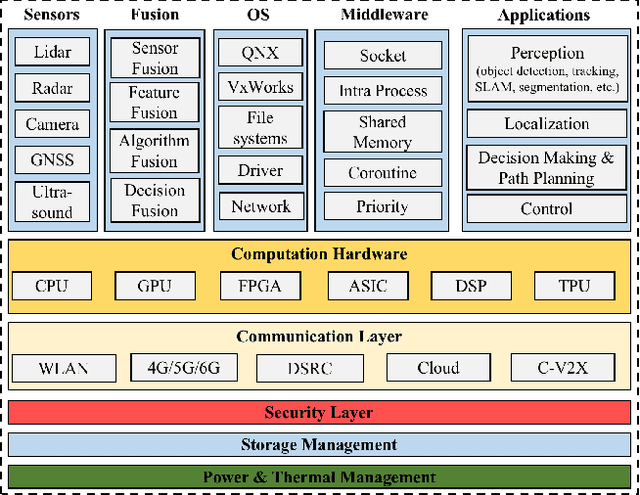
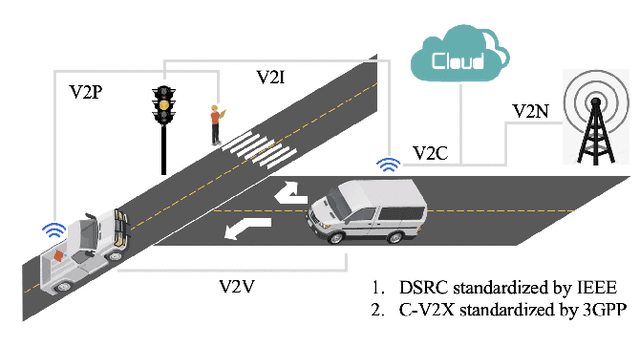

Interest in autonomous driving (AD) and intelligent vehicles (IVs) is growing at a rapid pace due to the convenience, safety, and economic benefits. Although a number of surveys have reviewed research achievements in this field, they are still limited in specific tasks and lack systematic summaries and research directions in the future. Our work is divided into 3 independent articles and the first part is a Survey of Surveys (SoS) for total technologies of AD and IVs that involves the history, summarizes the milestones, and provides the perspectives, ethics, and future research directions. This is the second part (Part \uppercase\expandafter{\romannumeral1} for this technical survey) to review the development of control, computing system design, communication, High Definition map (HD map), testing, and human behaviors in IVs. In addition, the third part (Part \uppercase\expandafter{\romannumeral2} for this technical survey) is to review the perception and planning sections. The objective of this paper is to involve all the sections of AD, summarize the latest technical milestones, and guide abecedarians to quickly understand the development of AD and IVs. Combining the SoS and Part \uppercase\expandafter{\romannumeral2}, we anticipate that this work will bring novel and diverse insights to researchers and abecedarians, and serve as a bridge between past and future.
* 18 pages, 4 figures, 3 tables
Milestones in Autonomous Driving and Intelligent Vehicles: Survey of Surveys
Mar 30, 2023



Interest in autonomous driving (AD) and intelligent vehicles (IVs) is growing at a rapid pace due to the convenience, safety, and economic benefits. Although a number of surveys have reviewed research achievements in this field, they are still limited in specific tasks, lack of systematic summary and research directions in the future. Here we propose a Survey of Surveys (SoS) for total technologies of AD and IVs that reviews the history, summarizes the milestones, and provides the perspectives, ethics, and future research directions. To our knowledge, this article is the first SoS with milestones in AD and IVs, which constitutes our complete research work together with two other technical surveys. We anticipate that this article will bring novel and diverse insights to researchers and abecedarians, and serve as a bridge between past and future.
* 13 pages, 3 tables, 0 figure
Embodied Footprints: A Safety-guaranteed Collision Avoidance Model for Numerical Optimization-based Trajectory Planning
Feb 15, 2023Numerical optimization-based methods are among the prevalent trajectory planners for autonomous driving. In a numerical optimization-based planner, the nominal continuous-time trajectory planning problem is discretized into a nonlinear program (NLP) problem with finite constraints imposed on finite collocation points. However, constraint violations between adjacent collocation points may still occur. This study proposes a safety-guaranteed collision-avoidance modeling method to eliminate the collision risks between adjacent collocation points in using numerical optimization-based trajectory planners. A new concept called embodied box is proposed, which is formed by enlarging the rectangular footprint of the ego vehicle. If one can ensure that the embodied boxes at finite collocation points are collide-free, then the ego vehicle's footprint is collide-free at any a moment between adjacent collocation points. We find that the geometric size of an embodied box is a simple function of vehicle velocity and curvature. The proposed theory lays a foundation for numerical optimization-based trajectory planners in autonomous driving.
MSAF: Multimodal Split Attention Fusion
Dec 13, 2020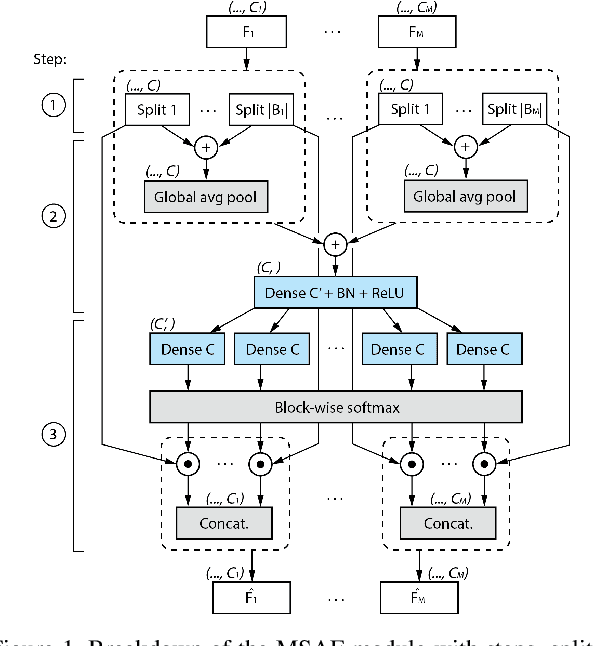
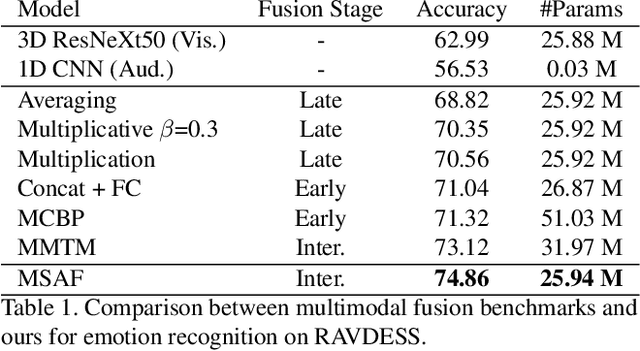
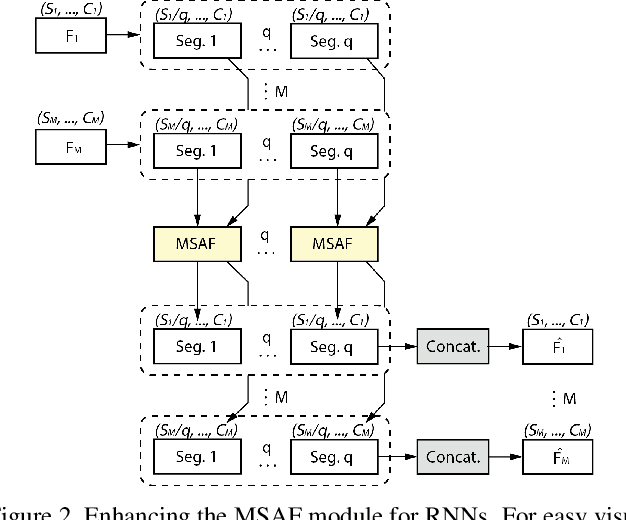
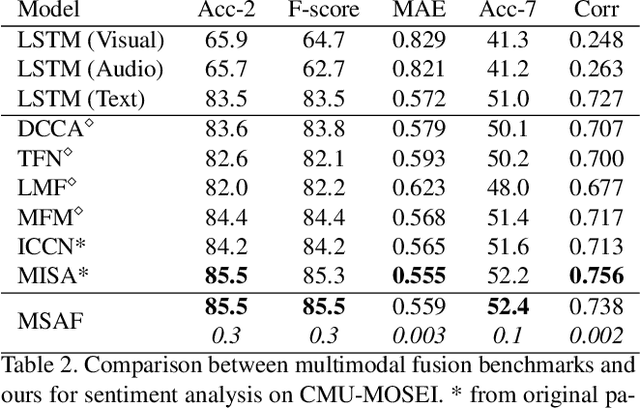
Multimodal learning mimics the reasoning process of the human multi-sensory system, which is used to perceive the surrounding world. While making a prediction, the human brain tends to relate crucial cues from multiple sources of information. In this work, we propose a novel multimodal fusion module that learns to emphasize more contributive features across all modalities. Specifically, the proposed Multimodal Split Attention Fusion (MSAF) module splits each modality into channel-wise equal feature blocks and creates a joint representation that is used to generate soft attention for each channel across the feature blocks. Further, the MSAF module is designed to be compatible with features of various spatial dimensions and sequence lengths, suitable for both CNNs and RNNs. Thus, MSAF can be easily added to fuse features of any unimodal networks and utilize existing pretrained unimodal model weights. To demonstrate the effectiveness of our fusion module, we design three multimodal networks with MSAF for emotion recognition, sentiment analysis, and action recognition tasks. Our approach achieves competitive results in each task and outperforms other application-specific networks and multimodal fusion benchmarks.
Multi-View Adaptive Fusion Network for 3D Object Detection
Nov 02, 2020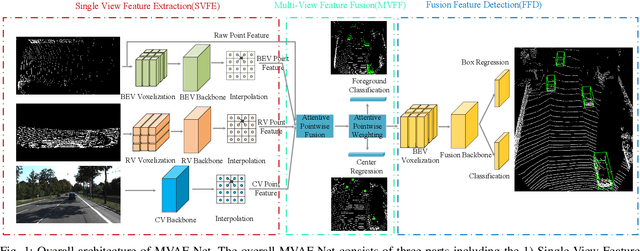

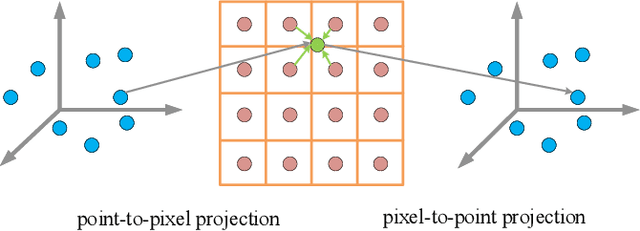
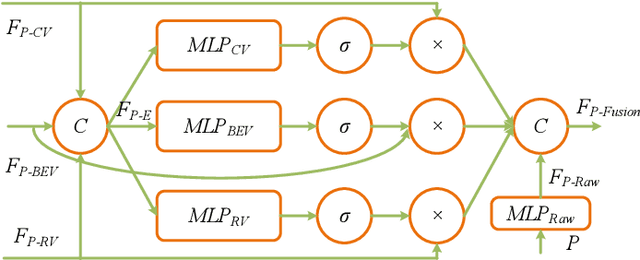
3D object detection based on LiDAR-camera fusion is becoming an emerging research theme for autonomous driving. However, it has been surprisingly difficult to effectively fuse both modalities without information loss and interference. To solve this issue, we propose a single-stage multi-view fusion framework that takes LiDAR Birds-Eye View, LiDAR Range View and Camera View images as inputs for 3D object detection. To effectively fuse multi-view features, we propose an Attentive Pointwise Fusion (APF) module to estimate the importance of the three sources with attention mechanisms which can achieve adaptive fusion of multi-view features in a pointwise manner. Besides, an Attentive Pointwise Weighting (APW) module is designed to help the network learn structure information and point feature importance with two extra tasks: foreground classification and center regression, and the predicted foreground probability will be used to reweight the point features. We design an end-to-end learnable network named MVAF-Net to integrate these two components. Our evaluations conducted on the KITTI 3D object detection datasets demonstrate that the proposed APF and APW module offer significant performance gain and that the proposed MVAF-Net achieves state-of-the-art performance in the KITTI benchmark.
Driving Tasks Transfer in Deep Reinforcement Learning for Decision-making of Autonomous Vehicles
Oct 10, 2020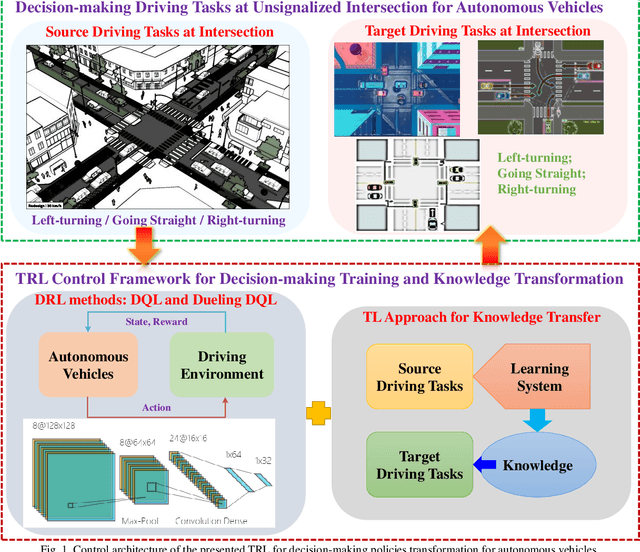
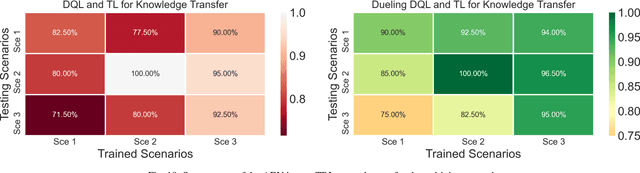
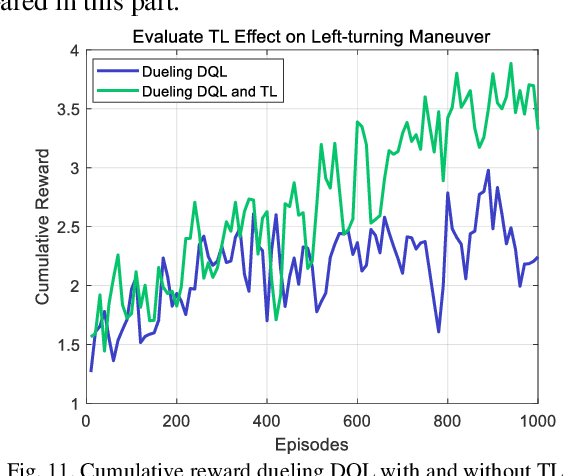
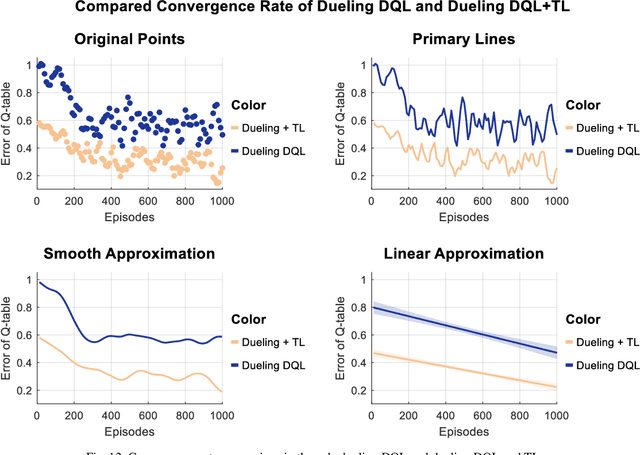
Knowledge transfer is a promising concept to achieve real-time decision-making for autonomous vehicles. This paper constructs a transfer deep reinforcement learning framework to transform the driving tasks in inter-section environments. The driving missions at the un-signalized intersection are cast into a left turn, right turn, and running straight for automated vehicles. The goal of the autonomous ego vehicle (AEV) is to drive through the intersection situation efficiently and safely. This objective promotes the studied vehicle to increase its speed and avoid crashing other vehicles. The decision-making pol-icy learned from one driving task is transferred and evaluated in another driving mission. Simulation results reveal that the decision-making strategies related to similar tasks are transferable. It indicates that the presented control framework could reduce the time consumption and realize online implementation.