 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSim-to-Real Domain Adaptation for Lane Detection and Classification in Autonomous Driving
Feb 15, 2022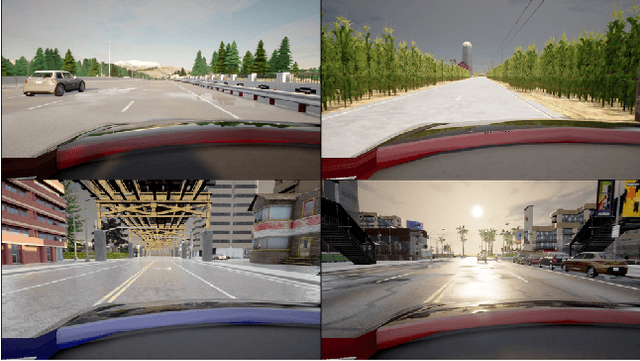

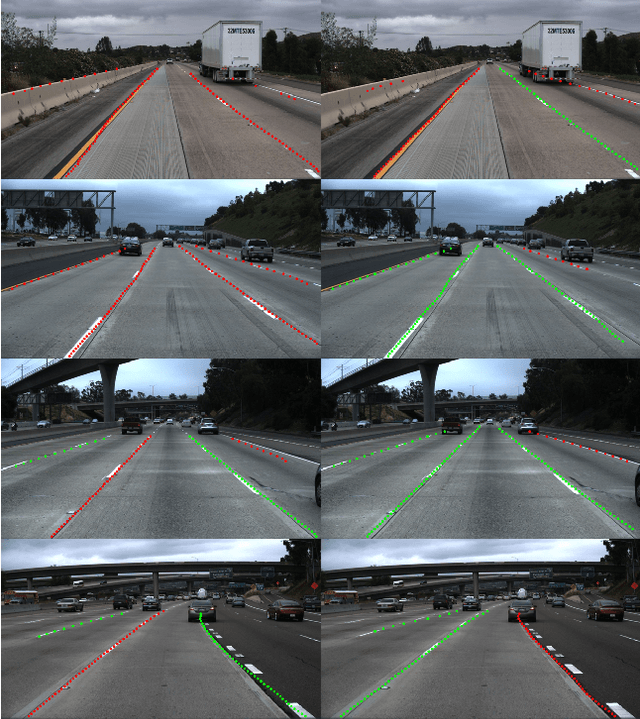
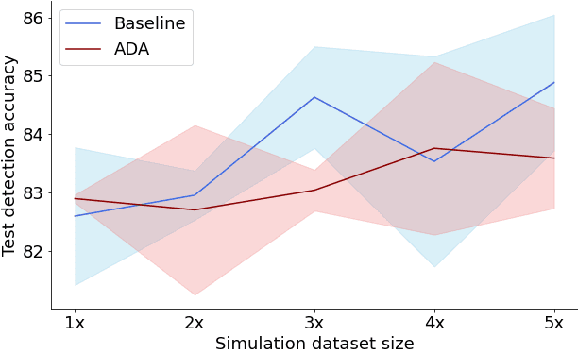
While supervised detection and classification frameworks in autonomous driving require large labelled datasets to converge, Unsupervised Domain Adaptation (UDA) approaches, facilitated by synthetic data generated from photo-real simulated environments, are considered low-cost and less time-consuming solutions. In this paper, we propose UDA schemes using adversarial discriminative and generative methods for lane detection and classification applications in autonomous driving. We also present Simulanes dataset generator to create a synthetic dataset that is naturalistic utilizing CARLA's vast traffic scenarios and weather conditions. The proposed UDA frameworks take the synthesized dataset with labels as the source domain, whereas the target domain is the unlabelled real-world data. Using adversarial generative and feature discriminators, the learnt models are tuned to predict the lane location and class in the target domain. The proposed techniques are evaluated using both real-world and our synthetic datasets. The results manifest that the proposed methods have shown superiority over other baseline schemes in terms of detection and classification accuracy and consistency. The ablation study reveals that the size of the simulation dataset plays important roles in the classification performance of the proposed methods. Our UDA frameworks are available at https://github.com/anita-hu/sim2real-lane-detection and our dataset generator is released at https://github.com/anita-hu/simulanes
MSAF: Multimodal Split Attention Fusion
Dec 13, 2020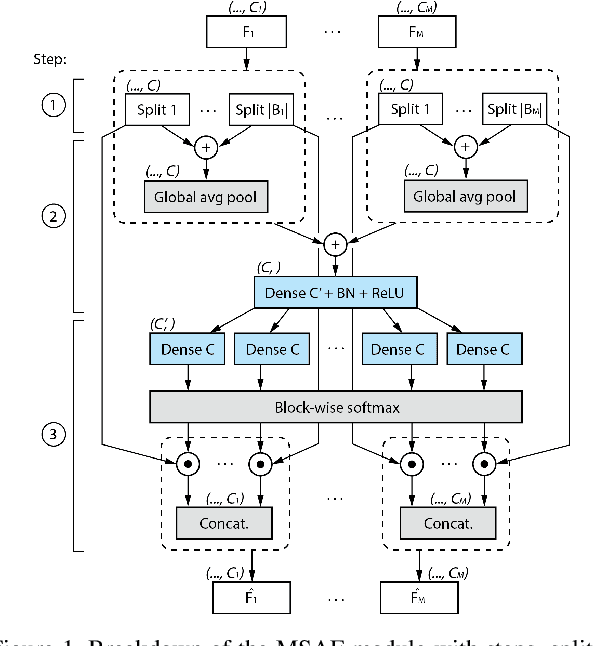
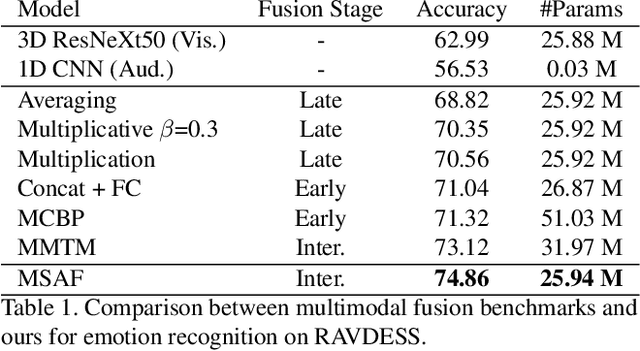
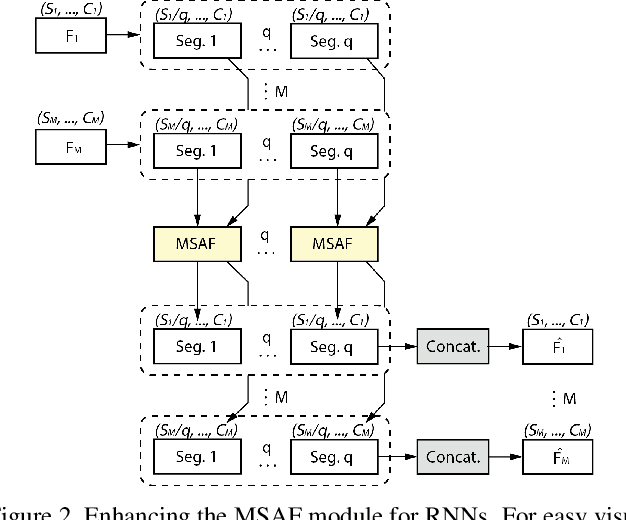
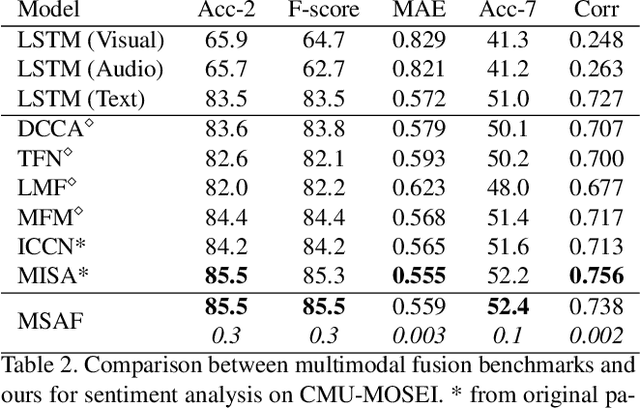
Multimodal learning mimics the reasoning process of the human multi-sensory system, which is used to perceive the surrounding world. While making a prediction, the human brain tends to relate crucial cues from multiple sources of information. In this work, we propose a novel multimodal fusion module that learns to emphasize more contributive features across all modalities. Specifically, the proposed Multimodal Split Attention Fusion (MSAF) module splits each modality into channel-wise equal feature blocks and creates a joint representation that is used to generate soft attention for each channel across the feature blocks. Further, the MSAF module is designed to be compatible with features of various spatial dimensions and sequence lengths, suitable for both CNNs and RNNs. Thus, MSAF can be easily added to fuse features of any unimodal networks and utilize existing pretrained unimodal model weights. To demonstrate the effectiveness of our fusion module, we design three multimodal networks with MSAF for emotion recognition, sentiment analysis, and action recognition tasks. Our approach achieves competitive results in each task and outperforms other application-specific networks and multimodal fusion benchmarks.