 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTSC: Topology-Conditioned Stackelberg Coordination for Multi-Agent Reinforcement Learning in Interactive Driving
Feb 27, 2026Safe and efficient autonomous driving in dense traffic is fundamentally a decentralized multi-agent coordination problem, where interactions at conflict points such as merging and weaving must be resolved reliably under partial observability. With only local and incomplete cues, interaction patterns can change rapidly, often causing unstable behaviors such as oscillatory yielding or unsafe commitments. Existing multi-agent reinforcement learning (MARL) approaches either adopt synchronous decision-making, which exacerbate non-stationarity, or depend on centralized sequencing mechanisms that scale poorly as traffic density increases. To address these limitations, we propose Topology-conditioned Stackelberg Coordination (TSC), a learning framework for decentralized interactive driving under communication-free execution, which extracts a time-varying directed priority graph from braid-inspired weaving relations between trajectories, thereby defining local leader-follower dependencies without constructing a global order of play. Conditioned on this graph, TSC endogenously factorizes dense interactions into graph-local Stackelberg subgames and, under centralized training and decentralized execution (CTDE), learns a sequential coordination policy that anticipates leaders via action prediction and trains followers through action-conditioned value learning to approximate local best responses, improving training stability and safety in dense traffic. Experiments across four dense traffic scenarios show that TSC achieves superior performance over representative MARL baselines across key metrics, most notably reducing collisions while maintaining competitive traffic efficiency and control smoothness.
FusionPlanner: A Multi-task Motion Planner for Mining Trucks using Multi-sensor Fusion Method
Aug 14, 2023In recent years, significant achievements have been made in motion planning for intelligent vehicles. However, as a typical unstructured environment, open-pit mining attracts limited attention due to its complex operational conditions and adverse environmental factors. A comprehensive paradigm for unmanned transportation in open-pit mines is proposed in this research, including a simulation platform, a testing benchmark, and a trustworthy and robust motion planner. \textcolor{red}{Firstly, we propose a multi-task motion planning algorithm, called FusionPlanner, for autonomous mining trucks by the Multi-sensor fusion method to adapt both lateral and longitudinal control tasks for unmanned transportation. Then, we develop a novel benchmark called MiningNav, which offers three validation approaches to evaluate the trustworthiness and robustness of well-trained algorithms in transportation roads of open-pit mines. Finally, we introduce the Parallel Mining Simulator (PMS), a new high-fidelity simulator specifically designed for open-pit mining scenarios. PMS enables the users to manage and control open-pit mine transportation from both the single-truck control and multi-truck scheduling perspectives.} \textcolor{red}{The performance of FusionPlanner is tested by MiningNav in PMS, and the empirical results demonstrate a significant reduction in the number of collisions and takeovers of our planner. We anticipate our unmanned transportation paradigm will bring mining trucks one step closer to trustworthiness and robustness in continuous round-the-clock unmanned transportation.
Milestones in Autonomous Driving and Intelligent Vehicles Part II: Perception and Planning
Jun 03, 2023



Growing interest in autonomous driving (AD) and intelligent vehicles (IVs) is fueled by their promise for enhanced safety, efficiency, and economic benefits. While previous surveys have captured progress in this field, a comprehensive and forward-looking summary is needed. Our work fills this gap through three distinct articles. The first part, a "Survey of Surveys" (SoS), outlines the history, surveys, ethics, and future directions of AD and IV technologies. The second part, "Milestones in Autonomous Driving and Intelligent Vehicles Part I: Control, Computing System Design, Communication, HD Map, Testing, and Human Behaviors" delves into the development of control, computing system, communication, HD map, testing, and human behaviors in IVs. This part, the third part, reviews perception and planning in the context of IVs. Aiming to provide a comprehensive overview of the latest advancements in AD and IVs, this work caters to both newcomers and seasoned researchers. By integrating the SoS and Part I, we offer unique insights and strive to serve as a bridge between past achievements and future possibilities in this dynamic field.
Milestones in Autonomous Driving and Intelligent Vehicles Part \uppercase\expandafter{\romannumeral1}: Control, Computing System Design, Communication, HD Map, Testing, and Human Behaviors
May 12, 2023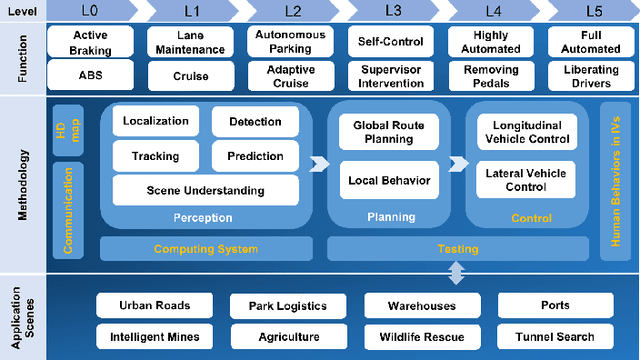
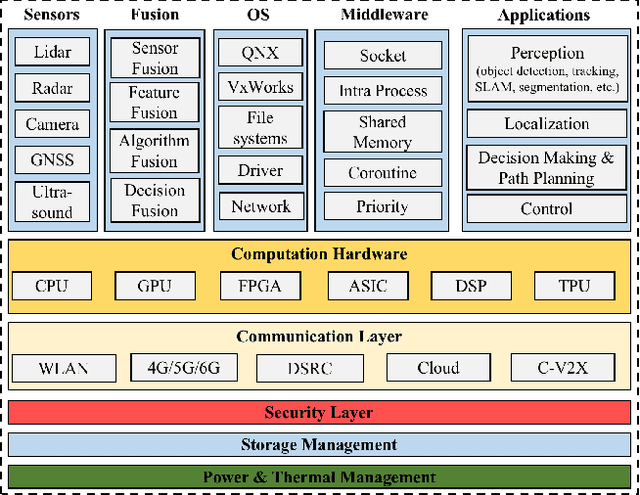
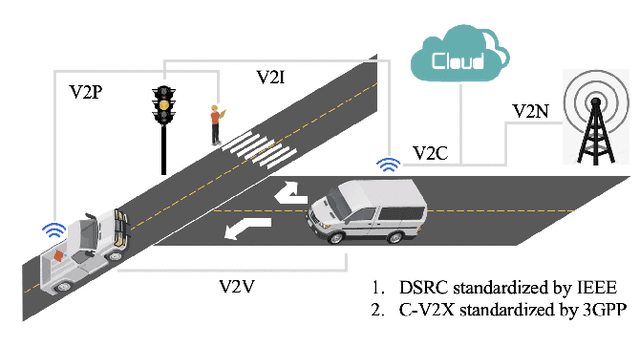

Interest in autonomous driving (AD) and intelligent vehicles (IVs) is growing at a rapid pace due to the convenience, safety, and economic benefits. Although a number of surveys have reviewed research achievements in this field, they are still limited in specific tasks and lack systematic summaries and research directions in the future. Our work is divided into 3 independent articles and the first part is a Survey of Surveys (SoS) for total technologies of AD and IVs that involves the history, summarizes the milestones, and provides the perspectives, ethics, and future research directions. This is the second part (Part \uppercase\expandafter{\romannumeral1} for this technical survey) to review the development of control, computing system design, communication, High Definition map (HD map), testing, and human behaviors in IVs. In addition, the third part (Part \uppercase\expandafter{\romannumeral2} for this technical survey) is to review the perception and planning sections. The objective of this paper is to involve all the sections of AD, summarize the latest technical milestones, and guide abecedarians to quickly understand the development of AD and IVs. Combining the SoS and Part \uppercase\expandafter{\romannumeral2}, we anticipate that this work will bring novel and diverse insights to researchers and abecedarians, and serve as a bridge between past and future.
* 18 pages, 4 figures, 3 tables
Milestones in Autonomous Driving and Intelligent Vehicles: Survey of Surveys
Mar 30, 2023



Interest in autonomous driving (AD) and intelligent vehicles (IVs) is growing at a rapid pace due to the convenience, safety, and economic benefits. Although a number of surveys have reviewed research achievements in this field, they are still limited in specific tasks, lack of systematic summary and research directions in the future. Here we propose a Survey of Surveys (SoS) for total technologies of AD and IVs that reviews the history, summarizes the milestones, and provides the perspectives, ethics, and future research directions. To our knowledge, this article is the first SoS with milestones in AD and IVs, which constitutes our complete research work together with two other technical surveys. We anticipate that this article will bring novel and diverse insights to researchers and abecedarians, and serve as a bridge between past and future.
* 13 pages, 3 tables, 0 figure
Motion Planning for Autonomous Driving: The State of the Art and Future Perspectives
Mar 29, 2023



Thanks to the augmented convenience, safety advantages, and potential commercial value, Intelligent vehicles (IVs) have attracted wide attention throughout the world. Although a few autonomous driving unicorns assert that IVs will be commercially deployable by 2025, their implementation is still restricted to small-scale validation due to various issues, among which precise computation of control commands or trajectories by planning methods remains a prerequisite for IVs. This paper aims to review state-of-the-art planning methods, including pipeline planning and end-to-end planning methods. In terms of pipeline methods, a survey of selecting algorithms is provided along with a discussion of the expansion and optimization mechanisms, whereas in end-to-end methods, the training approaches and verification scenarios of driving tasks are points of concern. Experimental platforms are reviewed to facilitate readers in selecting suitable training and validation methods. Finally, the current challenges and future directions are discussed. The side-by-side comparison presented in this survey not only helps to gain insights into the strengths and limitations of the reviewed methods but also assists with system-level design choices.