 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFreqGRL: Suppressing Low-Frequency Bias and Mining High-Frequency Knowledge for Cross-Domain Few-Shot Learning
Nov 10, 2025Cross-domain few-shot learning (CD-FSL) aims to recognize novel classes with only a few labeled examples under significant domain shifts. While recent approaches leverage a limited amount of labeled target-domain data to improve performance, the severe imbalance between abundant source data and scarce target data remains a critical challenge for effective representation learning. We present the first frequency-space perspective to analyze this issue and identify two key challenges: (1) models are easily biased toward source-specific knowledge encoded in the low-frequency components of source data, and (2) the sparsity of target data hinders the learning of high-frequency, domain-generalizable features. To address these challenges, we propose \textbf{FreqGRL}, a novel CD-FSL framework that mitigates the impact of data imbalance in the frequency space. Specifically, we introduce a Low-Frequency Replacement (LFR) module that substitutes the low-frequency components of source tasks with those from the target domain to create new source tasks that better align with target characteristics, thus reducing source-specific biases and promoting generalizable representation learning. We further design a High-Frequency Enhancement (HFE) module that filters out low-frequency components and performs learning directly on high-frequency features in the frequency space to improve cross-domain generalization. Additionally, a Global Frequency Filter (GFF) is incorporated to suppress noisy or irrelevant frequencies and emphasize informative ones, mitigating overfitting risks under limited target supervision. Extensive experiments on five standard CD-FSL benchmarks demonstrate that our frequency-guided framework achieves state-of-the-art performance.
Attentive Contextual Attention for Cloud Removal
Nov 20, 2024

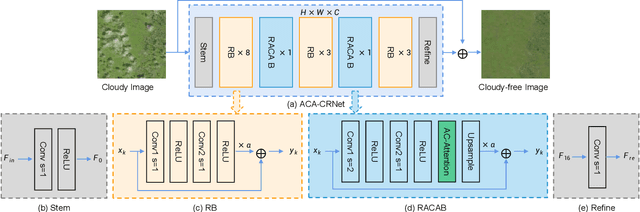

Cloud cover can significantly hinder the use of remote sensing images for Earth observation, prompting urgent advancements in cloud removal technology. Recently, deep learning strategies have shown strong potential in restoring cloud-obscured areas. These methods utilize convolution to extract intricate local features and attention mechanisms to gather long-range information, improving the overall comprehension of the scene. However, a common drawback of these approaches is that the resulting images often suffer from blurriness, artifacts, and inconsistencies. This is partly because attention mechanisms apply weights to all features based on generalized similarity scores, which can inadvertently introduce noise and irrelevant details from cloud-covered areas. To overcome this limitation and better capture relevant distant context, we introduce a novel approach named Attentive Contextual Attention (AC-Attention). This method enhances conventional attention mechanisms by dynamically learning data-driven attentive selection scores, enabling it to filter out noise and irrelevant features effectively. By integrating the AC-Attention module into the DSen2-CR cloud removal framework, we significantly improve the model's ability to capture essential distant information, leading to more effective cloud removal. Our extensive evaluation of various datasets shows that our method outperforms existing ones regarding image reconstruction quality. Additionally, we conducted ablation studies by integrating AC-Attention into multiple existing methods and widely used network architectures. These studies demonstrate the effectiveness and adaptability of AC-Attention and reveal its ability to focus on relevant features, thereby improving the overall performance of the networks. The code is available at \url{https://github.com/huangwenwenlili/ACA-CRNet}.
Semantic-aware Representation Learning for Homography Estimation
Jul 18, 2024



Homography estimation is the task of determining the transformation from an image pair. Our approach focuses on employing detector-free feature matching methods to address this issue. Previous work has underscored the importance of incorporating semantic information, however there still lacks an efficient way to utilize semantic information. Previous methods suffer from treating the semantics as a pre-processing, causing the utilization of semantics overly coarse-grained and lack adaptability when dealing with different tasks. In our work, we seek another way to use the semantic information, that is semantic-aware feature representation learning framework.Based on this, we propose SRMatcher, a new detector-free feature matching method, which encourages the network to learn integrated semantic feature representation.Specifically, to capture precise and rich semantics, we leverage the capabilities of recently popularized vision foundation models (VFMs) trained on extensive datasets. Then, a cross-images Semantic-aware Fusion Block (SFB) is proposed to integrate its fine-grained semantic features into the feature representation space. In this way, by reducing errors stemming from semantic inconsistencies in matching pairs, our proposed SRMatcher is able to deliver more accurate and realistic outcomes. Extensive experiments show that SRMatcher surpasses solid baselines and attains SOTA results on multiple real-world datasets. Compared to the previous SOTA approach GeoFormer, SRMatcher increases the area under the cumulative curve (AUC) by about 11\% on HPatches. Additionally, the SRMatcher could serve as a plug-and-play framework for other matching methods like LoFTR, yielding substantial precision improvement.
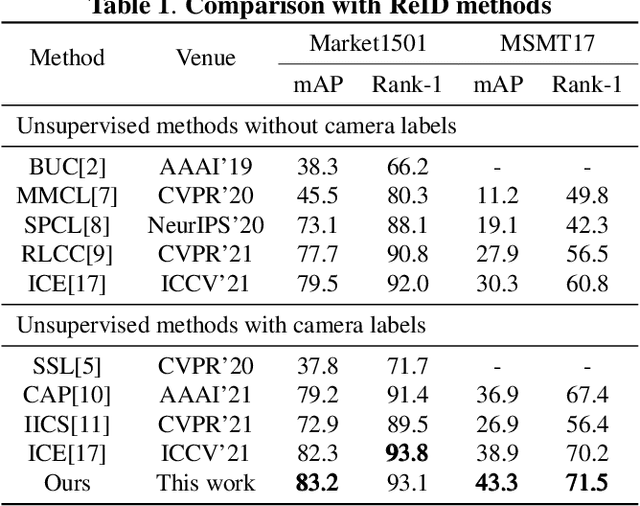
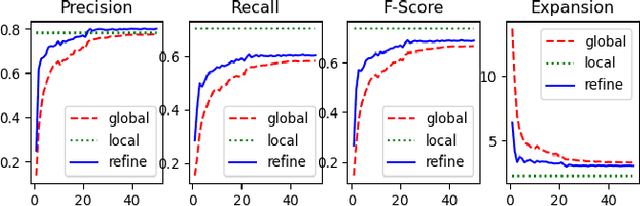
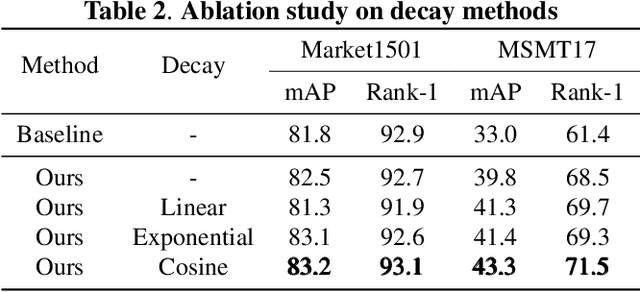
Camera-aware Label Refinement for Unsupervised Person Re-identification
Mar 25, 2024



Unsupervised person re-identification aims to retrieve images of a specified person without identity labels. Many recent unsupervised Re-ID approaches adopt clustering-based methods to measure cross-camera feature similarity to roughly divide images into clusters. They ignore the feature distribution discrepancy induced by camera domain gap, resulting in the unavoidable performance degradation. Camera information is usually available, and the feature distribution in the single camera usually focuses more on the appearance of the individual and has less intra-identity variance. Inspired by the observation, we introduce a \textbf{C}amera-\textbf{A}ware \textbf{L}abel \textbf{R}efinement~(CALR) framework that reduces camera discrepancy by clustering intra-camera similarity. Specifically, we employ intra-camera training to obtain reliable local pseudo labels within each camera, and then refine global labels generated by inter-camera clustering and train the discriminative model using more reliable global pseudo labels in a self-paced manner. Meanwhile, we develop a camera-alignment module to align feature distributions under different cameras, which could help deal with the camera variance further. Extensive experiments validate the superiority of our proposed method over state-of-the-art approaches. The code is accessible at https://github.com/leeBooMla/CALR.
Single-Shot and Multi-Shot Feature Learning for Multi-Object Tracking
Nov 17, 2023Multi-Object Tracking (MOT) remains a vital component of intelligent video analysis, which aims to locate targets and maintain a consistent identity for each target throughout a video sequence. Existing works usually learn a discriminative feature representation, such as motion and appearance, to associate the detections across frames, which are easily affected by mutual occlusion and background clutter in practice. In this paper, we propose a simple yet effective two-stage feature learning paradigm to jointly learn single-shot and multi-shot features for different targets, so as to achieve robust data association in the tracking process. For the detections without being associated, we design a novel single-shot feature learning module to extract discriminative features of each detection, which can efficiently associate targets between adjacent frames. For the tracklets being lost several frames, we design a novel multi-shot feature learning module to extract discriminative features of each tracklet, which can accurately refind these lost targets after a long period. Once equipped with a simple data association logic, the resulting VisualTracker can perform robust MOT based on the single-shot and multi-shot feature representations. Extensive experimental results demonstrate that our method has achieved significant improvements on MOT17 and MOT20 datasets while reaching state-of-the-art performance on DanceTrack dataset.
Understanding the Overfitting of the Episodic Meta-training
Jul 07, 2023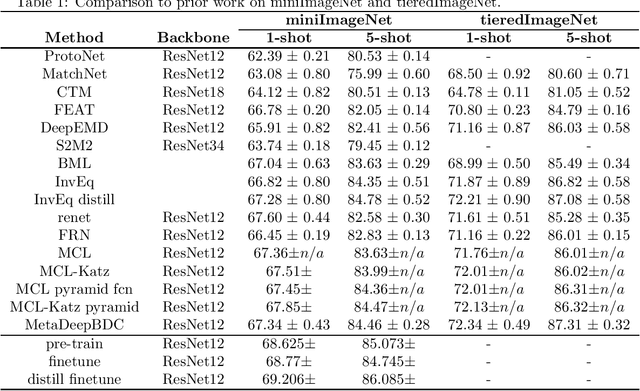
Despite the success of two-stage few-shot classification methods, in the episodic meta-training stage, the model suffers severe overfitting. We hypothesize that it is caused by over-discrimination, i.e., the model learns to over-rely on the superficial features that fit for base class discrimination while suppressing the novel class generalization. To penalize over-discrimination, we introduce knowledge distillation techniques to keep novel generalization knowledge from the teacher model during training. Specifically, we select the teacher model as the one with the best validation accuracy during meta-training and restrict the symmetric Kullback-Leibler (SKL) divergence between the output distribution of the linear classifier of the teacher model and that of the student model. This simple approach outperforms the standard meta-training process. We further propose the Nearest Neighbor Symmetric Kullback-Leibler (NNSKL) divergence for meta-training to push the limits of knowledge distillation techniques. NNSKL takes few-shot tasks as input and penalizes the output of the nearest neighbor classifier, which possesses an impact on the relationships between query embedding and support centers. By combining SKL and NNSKL in meta-training, the model achieves even better performance and surpasses state-of-the-art results on several benchmarks.
Milestones in Autonomous Driving and Intelligent Vehicles Part II: Perception and Planning
Jun 03, 2023



Growing interest in autonomous driving (AD) and intelligent vehicles (IVs) is fueled by their promise for enhanced safety, efficiency, and economic benefits. While previous surveys have captured progress in this field, a comprehensive and forward-looking summary is needed. Our work fills this gap through three distinct articles. The first part, a "Survey of Surveys" (SoS), outlines the history, surveys, ethics, and future directions of AD and IV technologies. The second part, "Milestones in Autonomous Driving and Intelligent Vehicles Part I: Control, Computing System Design, Communication, HD Map, Testing, and Human Behaviors" delves into the development of control, computing system, communication, HD map, testing, and human behaviors in IVs. This part, the third part, reviews perception and planning in the context of IVs. Aiming to provide a comprehensive overview of the latest advancements in AD and IVs, this work caters to both newcomers and seasoned researchers. By integrating the SoS and Part I, we offer unique insights and strive to serve as a bridge between past achievements and future possibilities in this dynamic field.
T-former: An Efficient Transformer for Image Inpainting
May 19, 2023
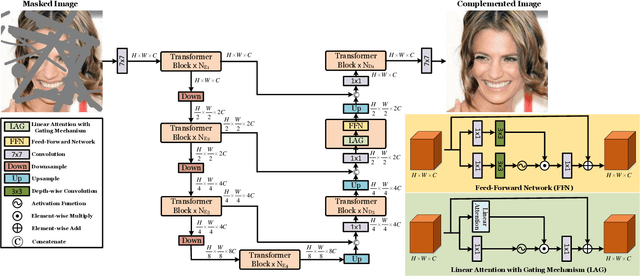

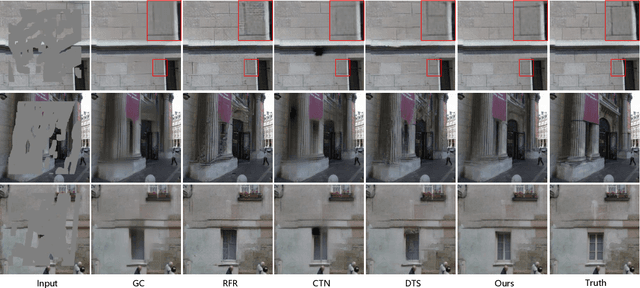
Benefiting from powerful convolutional neural networks (CNNs), learning-based image inpainting methods have made significant breakthroughs over the years. However, some nature of CNNs (e.g. local prior, spatially shared parameters) limit the performance in the face of broken images with diverse and complex forms. Recently, a class of attention-based network architectures, called transformer, has shown significant performance on natural language processing fields and high-level vision tasks. Compared with CNNs, attention operators are better at long-range modeling and have dynamic weights, but their computational complexity is quadratic in spatial resolution, and thus less suitable for applications involving higher resolution images, such as image inpainting. In this paper, we design a novel attention linearly related to the resolution according to Taylor expansion. And based on this attention, a network called $T$-former is designed for image inpainting. Experiments on several benchmark datasets demonstrate that our proposed method achieves state-of-the-art accuracy while maintaining a relatively low number of parameters and computational complexity. The code can be found at \href{https://github.com/dengyecode/T-former_image_inpainting}{github.com/dengyecode/T-former\_image\_inpainting}
Milestones in Autonomous Driving and Intelligent Vehicles Part \uppercase\expandafter{\romannumeral1}: Control, Computing System Design, Communication, HD Map, Testing, and Human Behaviors
May 12, 2023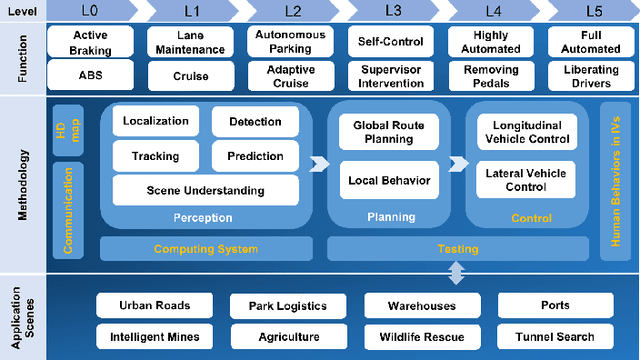
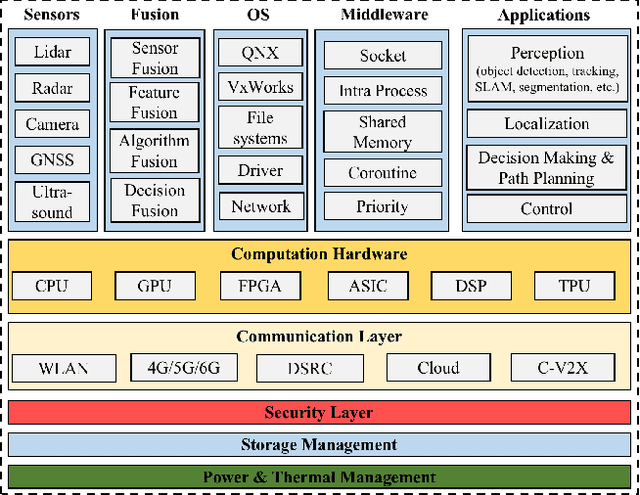
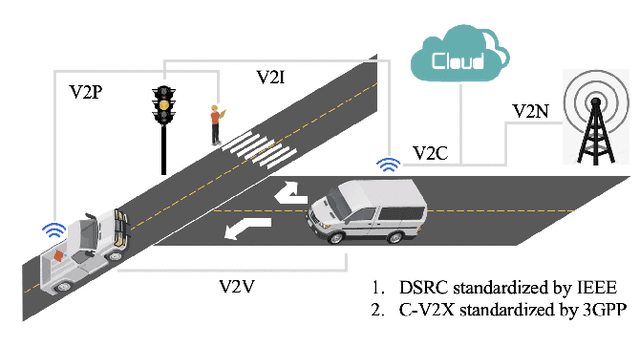

Interest in autonomous driving (AD) and intelligent vehicles (IVs) is growing at a rapid pace due to the convenience, safety, and economic benefits. Although a number of surveys have reviewed research achievements in this field, they are still limited in specific tasks and lack systematic summaries and research directions in the future. Our work is divided into 3 independent articles and the first part is a Survey of Surveys (SoS) for total technologies of AD and IVs that involves the history, summarizes the milestones, and provides the perspectives, ethics, and future research directions. This is the second part (Part \uppercase\expandafter{\romannumeral1} for this technical survey) to review the development of control, computing system design, communication, High Definition map (HD map), testing, and human behaviors in IVs. In addition, the third part (Part \uppercase\expandafter{\romannumeral2} for this technical survey) is to review the perception and planning sections. The objective of this paper is to involve all the sections of AD, summarize the latest technical milestones, and guide abecedarians to quickly understand the development of AD and IVs. Combining the SoS and Part \uppercase\expandafter{\romannumeral2}, we anticipate that this work will bring novel and diverse insights to researchers and abecedarians, and serve as a bridge between past and future.
* 18 pages, 4 figures, 3 tables
Pseudo Labels Refinement with Intra-camera Similarity for Unsupervised Person Re-identification
Apr 25, 2023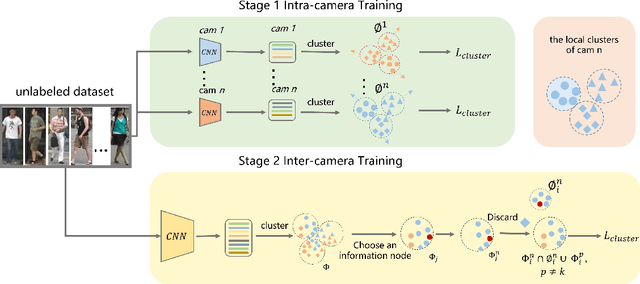
Unsupervised person re-identification (Re-ID) aims to retrieve person images across cameras without any identity labels. Most clustering-based methods roughly divide image features into clusters and neglect the feature distribution noise caused by domain shifts among different cameras, leading to inevitable performance degradation. To address this challenge, we propose a novel label refinement framework with clustering intra-camera similarity. Intra-camera feature distribution pays more attention to the appearance of pedestrians and labels are more reliable. We conduct intra-camera training to get local clusters in each camera, respectively, and refine inter-camera clusters with local results. We hence train the Re-ID model with refined reliable pseudo labels in a self-paced way. Extensive experiments demonstrate that the proposed method surpasses state-of-the-art performance.