 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorrentropy-Based Improper Likelihood Model for Robust Electrophysiological Source Imaging
Aug 27, 2024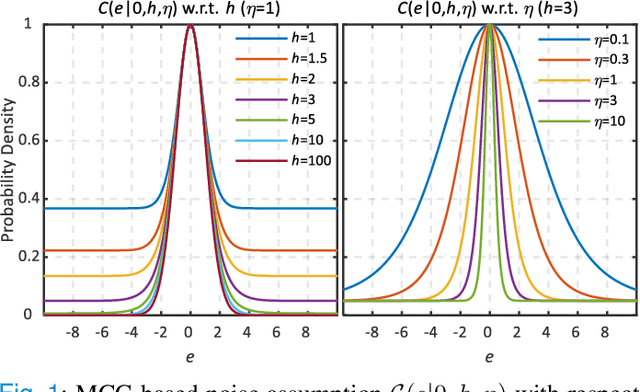
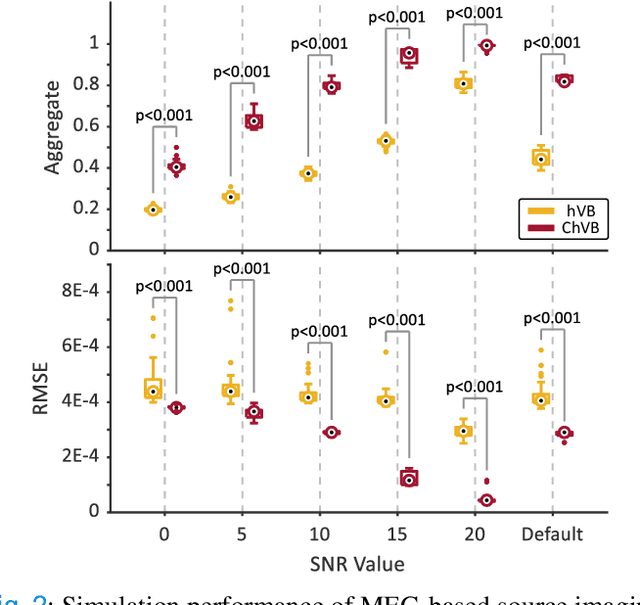
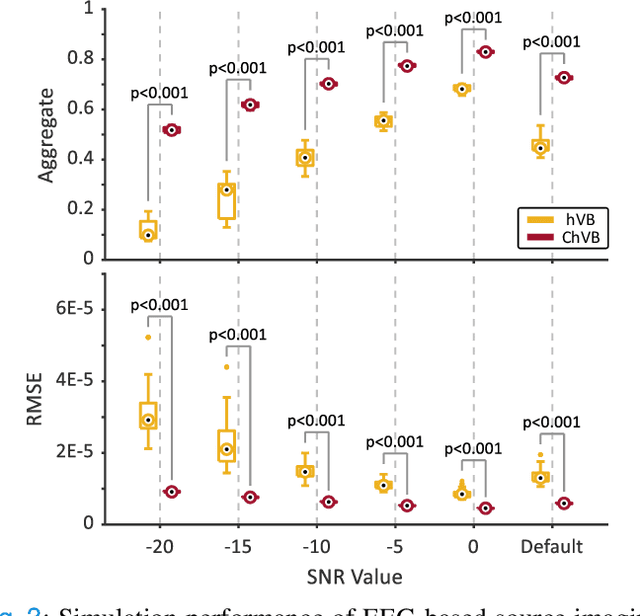
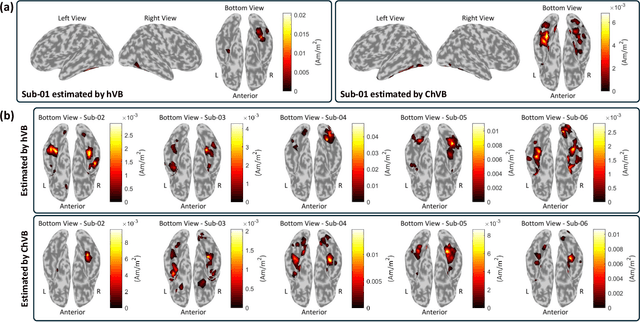
Bayesian learning provides a unified skeleton to solve the electrophysiological source imaging task. From this perspective, existing source imaging algorithms utilize the Gaussian assumption for the observation noise to build the likelihood function for Bayesian inference. However, the electromagnetic measurements of brain activity are usually affected by miscellaneous artifacts, leading to a potentially non-Gaussian distribution for the observation noise. Hence the conventional Gaussian likelihood model is a suboptimal choice for the real-world source imaging task. In this study, we aim to solve this problem by proposing a new likelihood model which is robust with respect to non-Gaussian noises. Motivated by the robust maximum correntropy criterion, we propose a new improper distribution model concerning the noise assumption. This new noise distribution is leveraged to structure a robust likelihood function and integrated with hierarchical prior distributions to estimate source activities by variational inference. In particular, the score matching is adopted to determine the hyperparameters for the improper likelihood model. A comprehensive performance evaluation is performed to compare the proposed noise assumption to the conventional Gaussian model. Simulation results show that, the proposed method can realize more precise source reconstruction by designing known ground-truth. The real-world dataset also demonstrates the superiority of our new method with the visual perception task. This study provides a new backbone for Bayesian source imaging, which would facilitate its application using real-world noisy brain signal.
Milestones in Autonomous Driving and Intelligent Vehicles Part \uppercase\expandafter{\romannumeral1}: Control, Computing System Design, Communication, HD Map, Testing, and Human Behaviors
May 12, 2023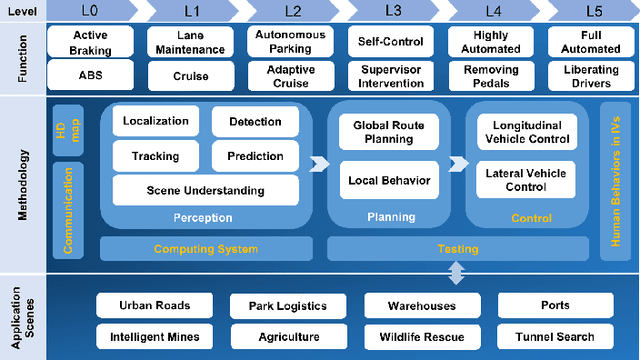
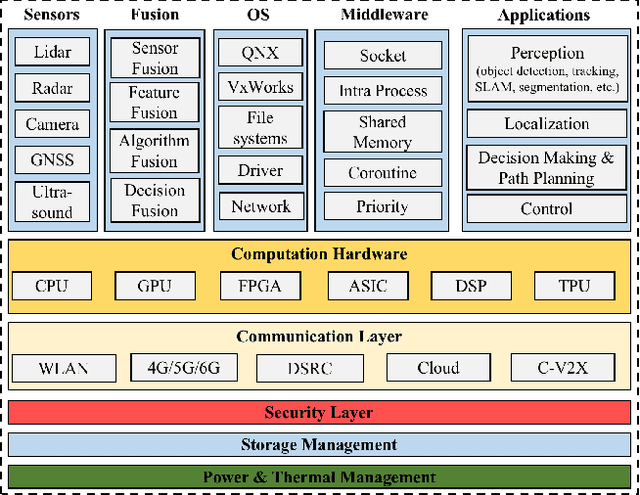
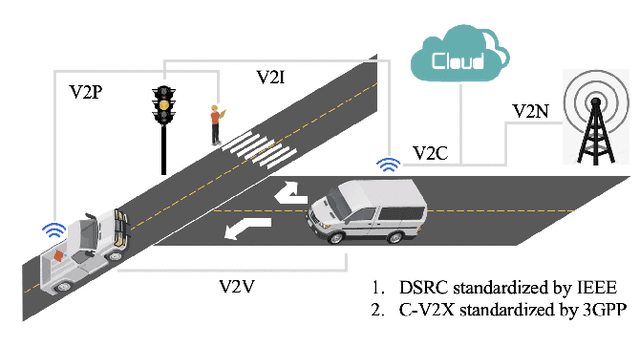

Interest in autonomous driving (AD) and intelligent vehicles (IVs) is growing at a rapid pace due to the convenience, safety, and economic benefits. Although a number of surveys have reviewed research achievements in this field, they are still limited in specific tasks and lack systematic summaries and research directions in the future. Our work is divided into 3 independent articles and the first part is a Survey of Surveys (SoS) for total technologies of AD and IVs that involves the history, summarizes the milestones, and provides the perspectives, ethics, and future research directions. This is the second part (Part \uppercase\expandafter{\romannumeral1} for this technical survey) to review the development of control, computing system design, communication, High Definition map (HD map), testing, and human behaviors in IVs. In addition, the third part (Part \uppercase\expandafter{\romannumeral2} for this technical survey) is to review the perception and planning sections. The objective of this paper is to involve all the sections of AD, summarize the latest technical milestones, and guide abecedarians to quickly understand the development of AD and IVs. Combining the SoS and Part \uppercase\expandafter{\romannumeral2}, we anticipate that this work will bring novel and diverse insights to researchers and abecedarians, and serve as a bridge between past and future.
* 18 pages, 4 figures, 3 tables
Milestones in Autonomous Driving and Intelligent Vehicles: Survey of Surveys
Mar 30, 2023



Interest in autonomous driving (AD) and intelligent vehicles (IVs) is growing at a rapid pace due to the convenience, safety, and economic benefits. Although a number of surveys have reviewed research achievements in this field, they are still limited in specific tasks, lack of systematic summary and research directions in the future. Here we propose a Survey of Surveys (SoS) for total technologies of AD and IVs that reviews the history, summarizes the milestones, and provides the perspectives, ethics, and future research directions. To our knowledge, this article is the first SoS with milestones in AD and IVs, which constitutes our complete research work together with two other technical surveys. We anticipate that this article will bring novel and diverse insights to researchers and abecedarians, and serve as a bridge between past and future.
* 13 pages, 3 tables, 0 figure
Human-in-the-Loop Deep Reinforcement Learning with Application to Autonomous Driving
Apr 15, 2021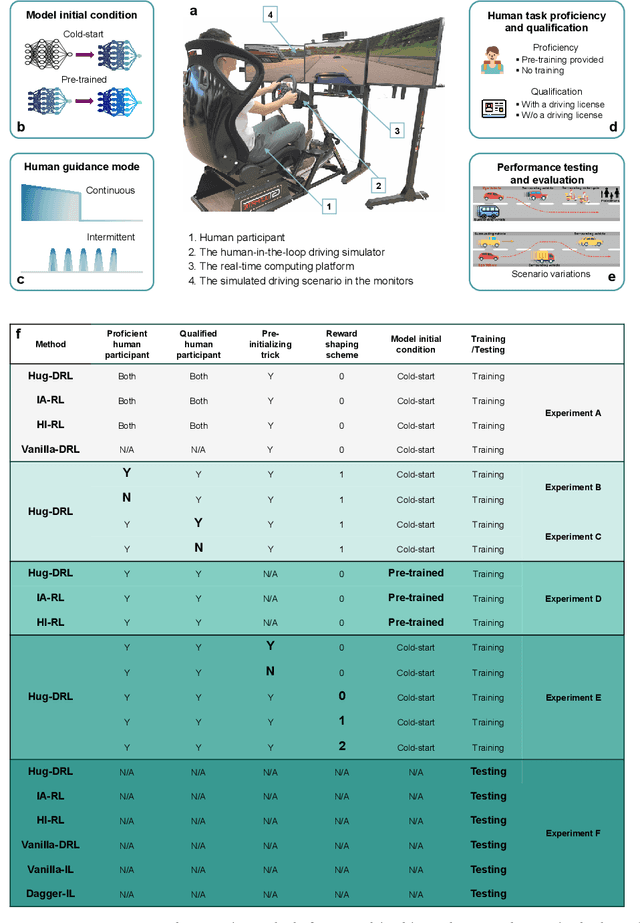
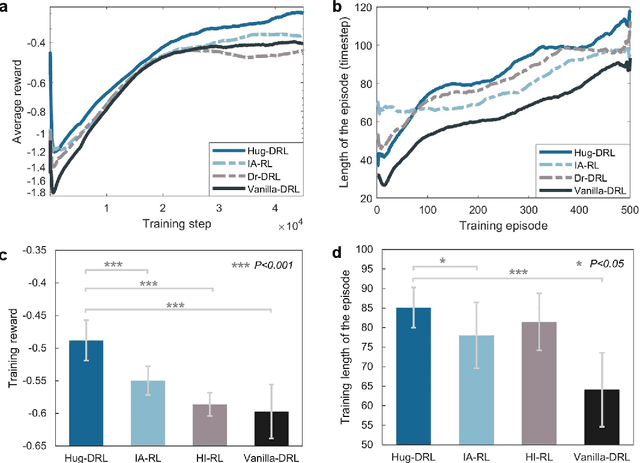
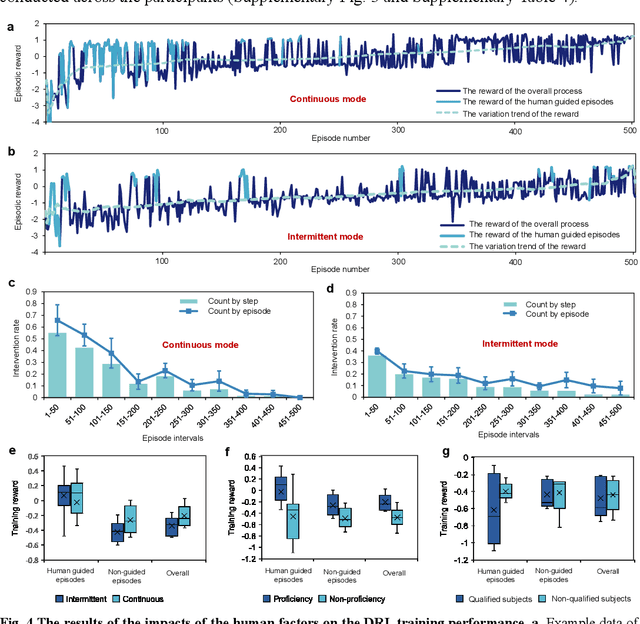

Due to the limited smartness and abilities of machine intelligence, currently autonomous vehicles are still unable to handle all kinds of situations and completely replace drivers. Because humans exhibit strong robustness and adaptability in complex driving scenarios, it is of great importance to introduce humans into the training loop of artificial intelligence, leveraging human intelligence to further advance machine learning algorithms. In this study, a real-time human-guidance-based deep reinforcement learning (Hug-DRL) method is developed for policy training of autonomous driving. Leveraging a newly designed control transfer mechanism between human and automation, human is able to intervene and correct the agent's unreasonable actions in real time when necessary during the model training process. Based on this human-in-the-loop guidance mechanism, an improved actor-critic architecture with modified policy and value networks is developed. The fast convergence of the proposed Hug-DRL allows real-time human guidance actions to be fused into the agent's training loop, further improving the efficiency and performance of deep reinforcement learning. The developed method is validated by human-in-the-loop experiments with 40 subjects and compared with other state-of-the-art learning approaches. The results suggest that the proposed method can effectively enhance the training efficiency and performance of the deep reinforcement learning algorithm under human guidance, without imposing specific requirements on participant expertise and experience.
A Marker-free Head Tracker Using Vision-based Head Pose Estimation with Adaptive Kalman Filter
Mar 24, 2021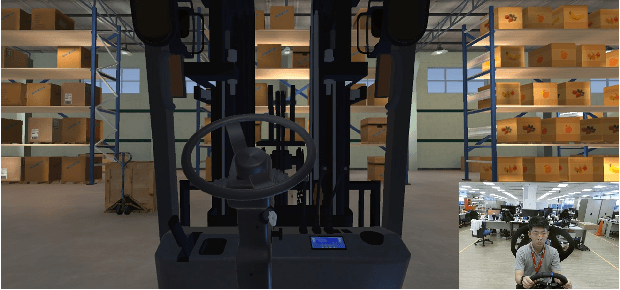

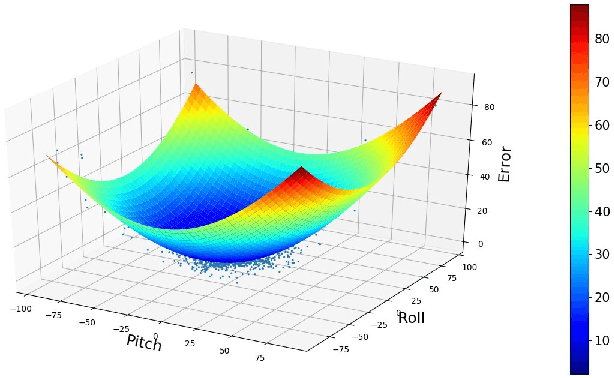
The immersion and the interaction are the important features of the driving simulator. To improve these characteristics, this paper proposes a low-cost and mark-less driver head tracking framework based on the head pose estimation model, which makes the view of the simulator can automatically align with the driver's head pose. The proposed method only uses the RGB camera without the other hardware or marker. To handle the error of the head pose estimation model, this paper proposes an adaptive Kalman Filter. By analyzing the error distribution of the estimation model and user experience, the proposed Kalman Filter includes the adaptive observation noise coefficient and loop closure module, which can adaptive moderate the smoothness of the curve and keep the curve stable near the initial position. The experiments show that the proposed method is feasible, and it can be used with different head pose estimation models.
Deep Convolutional Neural Network-based Bernoulli Heatmap for Head Pose Estimation
May 24, 2020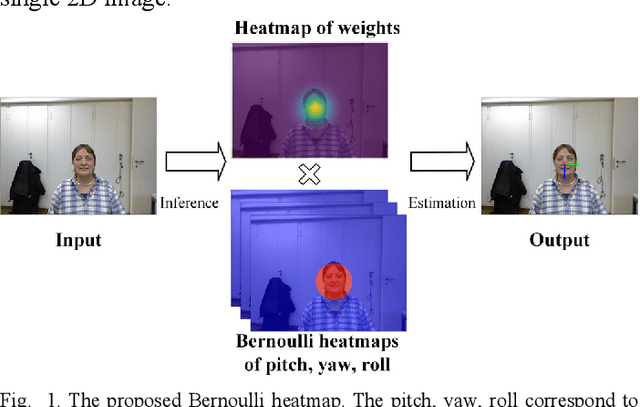
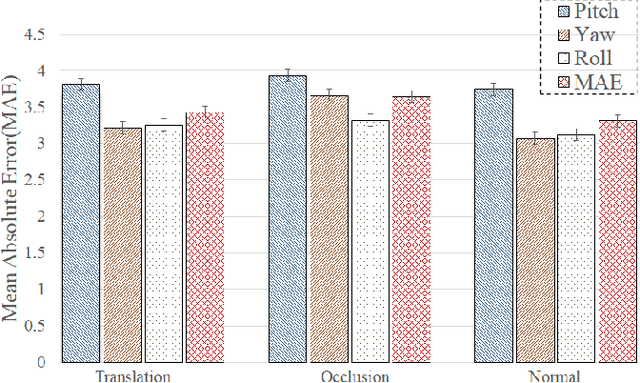
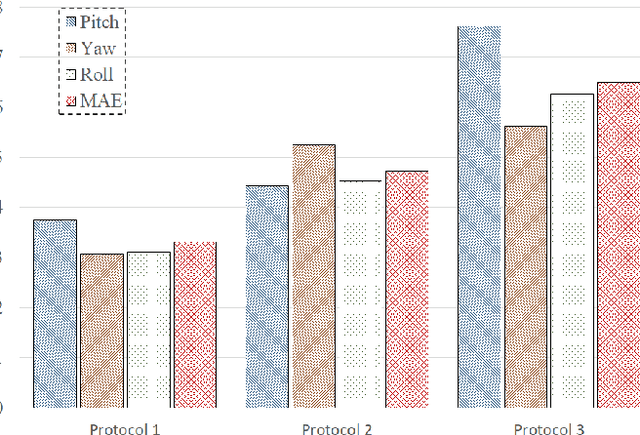
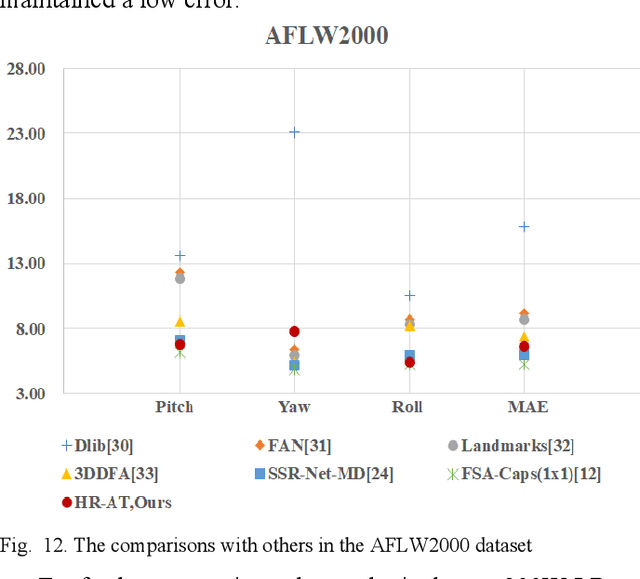
Head pose estimation is a crucial problem for many tasks, such as driver attention, fatigue detection, and human behaviour analysis. It is well known that neural networks are better at handling classification problems than regression problems. It is an extremely nonlinear process to let the network output the angle value directly for optimization learning, and the weight constraint of the loss function will be relatively weak. This paper proposes a novel Bernoulli heatmap for head pose estimation from a single RGB image. Our method can achieve the positioning of the head area while estimating the angles of the head. The Bernoulli heatmap makes it possible to construct fully convolutional neural networks without fully connected layers and provides a new idea for the output form of head pose estimation. A deep convolutional neural network (CNN) structure with multiscale representations is adopted to maintain high-resolution information and low-resolution information in parallel. This kind of structure can maintain rich, high-resolution representations. In addition, channelwise fusion is adopted to make the fusion weights learnable instead of simple addition with equal weights. As a result, the estimation is spatially more precise and potentially more accurate. The effectiveness of the proposed method is empirically demonstrated by comparing it with other state-of-the-art methods on public datasets.
Human-Like Decision Making for Autonomous Driving: A Noncooperative Game Theoretic Approach
May 22, 2020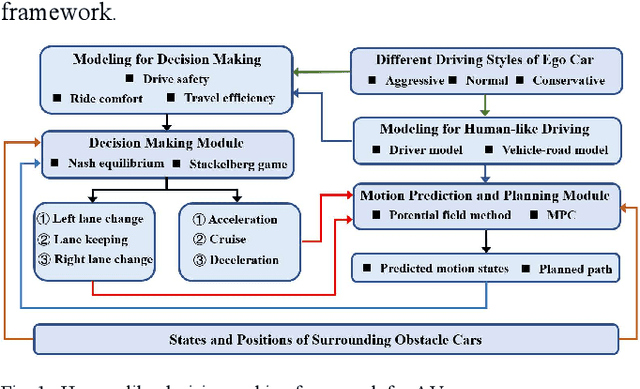
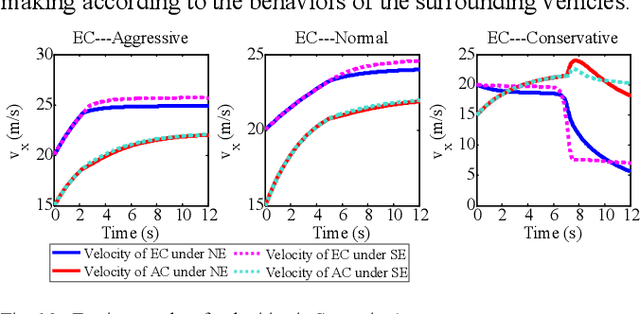
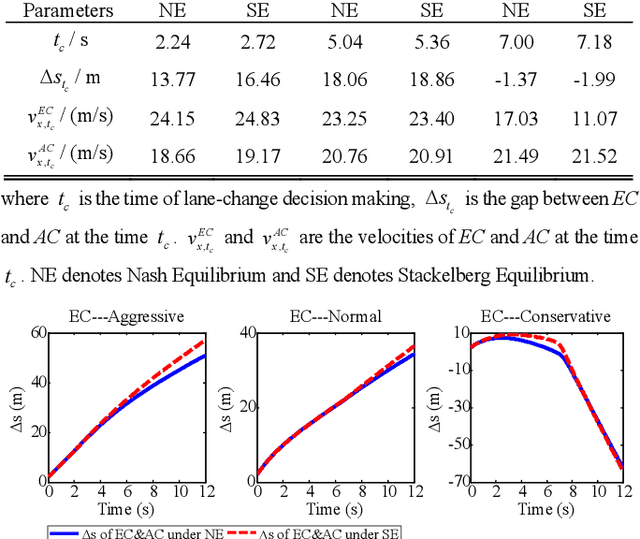
Considering that human-driven vehicles and autonomous vehicles (AVs) will coexist on roads in the future for a long time, how to merge AVs into human drivers traffic ecology and minimize the effect of AVs and their misfit with human drivers, are issues worthy of consideration. Moreover, different passengers have different needs for AVs, thus, how to provide personalized choices for different passengers is another issue for AVs. Therefore, a human-like decision making framework is designed for AVs in this paper. Different driving styles and social interaction characteristics are formulated for AVs regarding drive safety, ride comfort and travel efficiency, which are considered in the modelling process of decision making. Then, Nash equilibrium and Stackelberg game theory are applied to the noncooperative decision making. In addition, potential field method and model predictive control (MPC) are combined to deal with the motion prediction and planning for AVs, which provides predicted motion information for the decision-making module. Finally, two typical testing scenarios of lane change, i.e., merging and overtaking, are carried out to evaluate the feasibility and effectiveness of the proposed decision-making framework considering different human-like behaviors. Testing results indicate that this human-like decision making framework can make personalized decisions according to different driving styles.
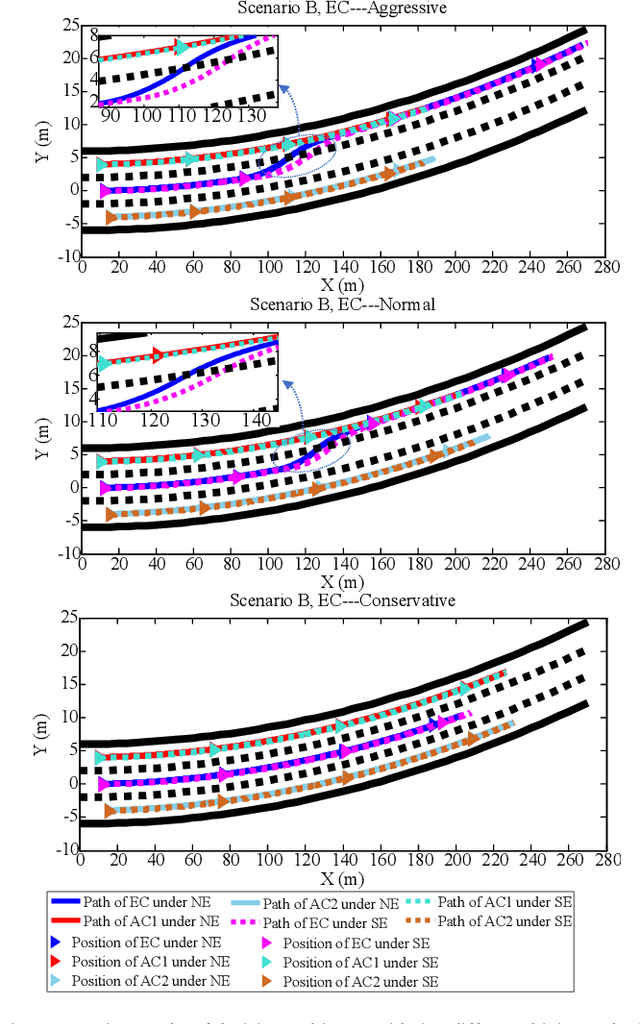
An Integrated Framework of Decision Making and Motion Planning for Autonomous Vehicles Considering Social Behaviors
May 22, 2020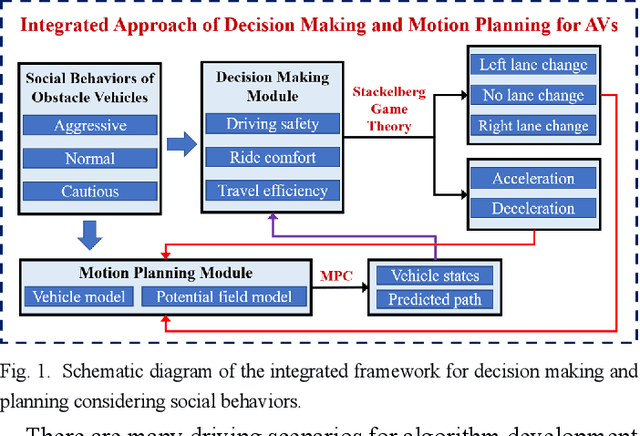
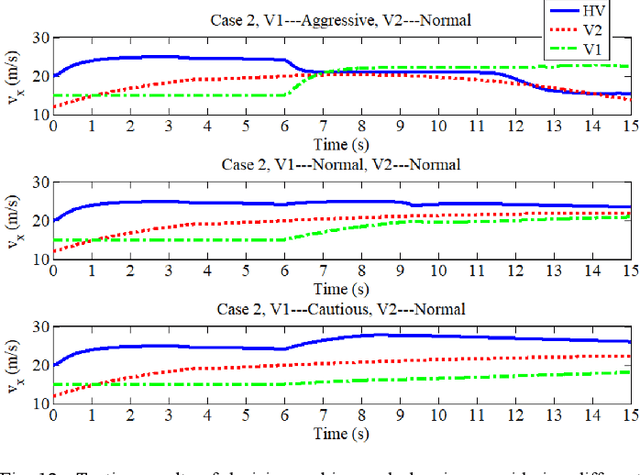
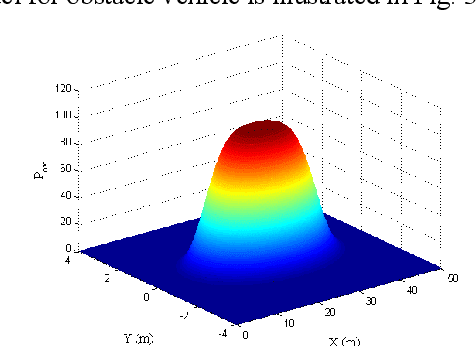
This paper presents a novel integrated approach to deal with the decision making and motion planning for lane-change maneuvers of autonomous vehicle (AV) considering social behaviors of surrounding traffic occupants. Reflected by driving styles and intentions of surrounding vehicles, the social behaviors are taken into consideration during the modelling process. Then, the Stackelberg Game theory is applied to solve the decision-making, which is formulated as a non-cooperative game problem. Besides, potential field is adopted in the motion planning model, which uses different potential functions to describe surrounding vehicles with different behaviors and road constrains. Then, Model Predictive Control (MPC) is utilized to predict the state and trajectory of the autonomous vehicle. Finally, the decision-making and motion planning is then integrated into a constrained multi-objective optimization problem. Three testing scenarios considering different social behaviors of surrounding vehicles are carried out to validate the performance of the proposed approach. Testing results show that the integrated approach is able to address different social interactions with other traffic participants, and make proper and safe decisions and planning for autonomous vehicles, demonstrating its feasibility and effectiveness.