 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePre-trained Transformer-Enabled Strategies with Human-Guided Fine-Tuning for End-to-end Navigation of Autonomous Vehicles
Feb 20, 2024Autonomous driving (AD) technology, leveraging artificial intelligence, strives for vehicle automation. End-toend strategies, emerging to simplify traditional driving systems by integrating perception, decision-making, and control, offer new avenues for advanced driving functionalities. Despite their potential, current challenges include data efficiency, training complexities, and poor generalization. This study addresses these issues with a novel end-to-end AD training model, enhancing system adaptability and intelligence. The model incorporates a Transformer module into the policy network, undergoing initial behavior cloning (BC) pre-training for update gradients. Subsequently, fine-tuning through reinforcement learning with human guidance (RLHG) adapts the model to specific driving environments, aiming to surpass the performance limits of imitation learning (IL). The fine-tuning process involves human interactions, guiding the model to acquire more efficient and safer driving behaviors through supervision, intervention, demonstration, and reward feedback. Simulation results demonstrate that this framework accelerates learning, achieving precise control and significantly enhancing safety and reliability. Compared to other advanced baseline methods, the proposed approach excels in challenging AD tasks. The introduction of the Transformer module and human-guided fine-tuning provides valuable insights and methods for research and applications in the AD field.
Learning Interaction-aware Motion Prediction Model for Decision-making in Autonomous Driving
Feb 08, 2023



Predicting the behaviors of other road users is crucial to safe and intelligent decision-making for autonomous vehicles (AVs). However, most motion prediction models ignore the influence of the AV's actions and the planning module has to treat other agents as unalterable moving obstacles. To address this problem, this paper proposes an interaction-aware motion prediction model that is able to predict other agents' future trajectories according to the ego agent's future plan, i.e., their reactions to the ego's actions. Specifically, we employ Transformers to effectively encode the driving scene and incorporate the AV's plan in decoding the predicted trajectories. To train the model to accurately predict the reactions of other agents, we develop an online learning framework, where the ego agent explores the environment and collects other agents' reactions to itself. We validate the decision-making and learning framework in three highly interactive simulated driving scenarios. The results reveal that our decision-making method significantly outperforms the reinforcement learning methods in terms of data efficiency and performance. We also find that using the interaction-aware model can bring better performance than the non-interaction-aware model and the exploration process helps improve the success rate in testing.
Conditional Predictive Behavior Planning with Inverse Reinforcement Learning for Human-like Autonomous Driving
Dec 17, 2022Making safe and human-like decisions is an essential capability of autonomous driving systems and learning-based behavior planning is a promising pathway toward this objective. Distinguished from existing learning-based methods that directly output decisions, this work introduces a predictive behavior planning framework that learns to predict and evaluate from human driving data. Concretely, a behavior generation module first produces a diverse set of candidate behaviors in the form of trajectory proposals. Then the proposed conditional motion prediction network is employed to forecast other agents' future trajectories conditioned on each trajectory proposal. Given the candidate plans and associated prediction results, we learn a scoring module to evaluate the plans using maximum entropy inverse reinforcement learning (IRL). We conduct comprehensive experiments to validate the proposed framework on a large-scale real-world urban driving dataset. The results reveal that the conditional prediction model is able to forecast multiple possible future trajectories given a candidate behavior and the prediction results are reactive to different plans. Moreover, the IRL-based scoring module can properly evaluate the trajectory proposals and select close-to-human ones. The proposed framework outperforms other baseline methods in terms of similarity to human driving trajectories. Moreover, we find that the conditional prediction model can improve both prediction and planning performance compared to the non-conditional model, and learning the scoring module is critical to correctly evaluating the candidate plans to align with human drivers.
Graph Reinforcement Learning Application to Co-operative Decision-Making in Mixed Autonomy Traffic: Framework, Survey, and Challenges
Nov 06, 2022Proper functioning of connected and automated vehicles (CAVs) is crucial for the safety and efficiency of future intelligent transport systems. Meanwhile, transitioning to fully autonomous driving requires a long period of mixed autonomy traffic, including both CAVs and human-driven vehicles. Thus, collaboration decision-making for CAVs is essential to generate appropriate driving behaviors to enhance the safety and efficiency of mixed autonomy traffic. In recent years, deep reinforcement learning (DRL) has been widely used in solving decision-making problems. However, the existing DRL-based methods have been mainly focused on solving the decision-making of a single CAV. Using the existing DRL-based methods in mixed autonomy traffic cannot accurately represent the mutual effects of vehicles and model dynamic traffic environments. To address these shortcomings, this article proposes a graph reinforcement learning (GRL) approach for multi-agent decision-making of CAVs in mixed autonomy traffic. First, a generic and modular GRL framework is designed. Then, a systematic review of DRL and GRL methods is presented, focusing on the problems addressed in recent research. Moreover, a comparative study on different GRL methods is further proposed based on the designed framework to verify the effectiveness of GRL methods. Results show that the GRL methods can well optimize the performance of multi-agent decision-making for CAVs in mixed autonomy traffic compared to the DRL methods. Finally, challenges and future research directions are summarized. This study can provide a valuable research reference for solving the multi-agent decision-making problems of CAVs in mixed autonomy traffic and can promote the implementation of GRL-based methods into intelligent transportation systems. The source code of our work can be found at https://github.com/Jacklinkk/Graph_CAVs.
Differentiable Integrated Motion Prediction and Planning with Learnable Cost Function for Autonomous Driving
Jul 21, 2022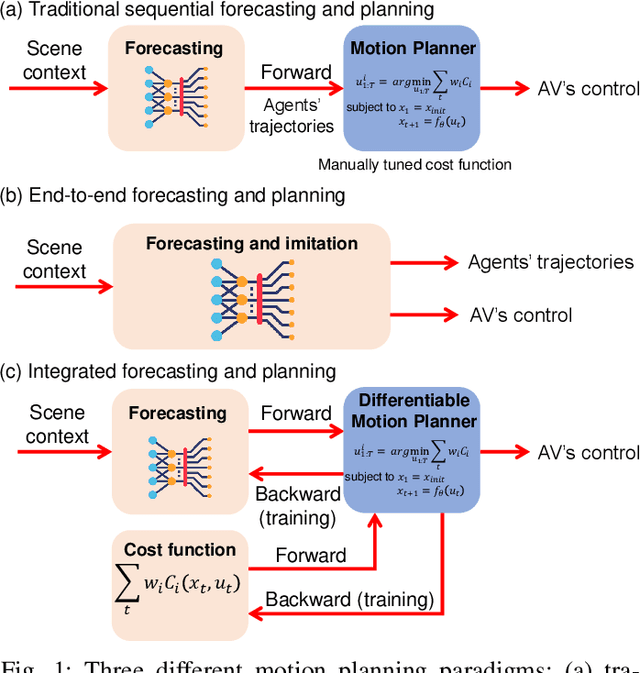



Predicting the future states of surrounding traffic participants and planning a safe, smooth, and socially compliant trajectory accordingly is crucial for autonomous vehicles. There are two major issues with the current autonomous driving system: the prediction module is often decoupled from the planning module and the cost function for planning is hard to specify and tune. To tackle these issues, we propose an end-to-end differentiable framework that integrates prediction and planning modules and is able to learn the cost function from data. Specifically, we employ a differentiable nonlinear optimizer as the motion planner, which takes the predicted trajectories of surrounding agents given by the neural network as input and optimizes the trajectory for the autonomous vehicle, thus enabling all operations in the framework to be differentiable including the cost function weights. The proposed framework is trained on a large-scale real-world driving dataset to imitate human driving trajectories in the entire driving scene and validated in both open-loop and closed-loop manners. The open-loop testing results reveal that the proposed method outperforms the baseline methods across a variety of metrics and delivers planning-centric prediction results, allowing the planning module to output close-to-human trajectories. In closed-loop testing, the proposed method shows the ability to handle complex urban driving scenarios and robustness against the distributional shift that imitation learning methods suffer from. Importantly, we find that joint training of planning and prediction modules achieves better performance than planning with a separate trained prediction module in both open-loop and closed-loop tests. Moreover, the ablation study indicates that the learnable components in the framework are essential to ensure planning stability and performance.
Safe Decision-making for Lane-change of Autonomous Vehicles via Human Demonstration-aided Reinforcement Learning
Jul 07, 2022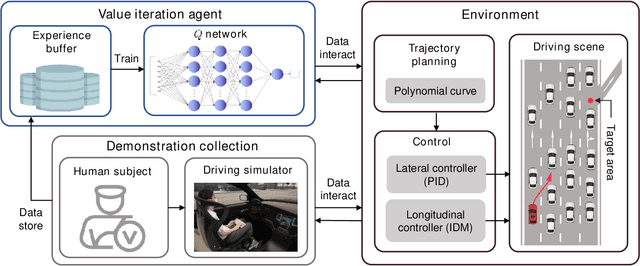
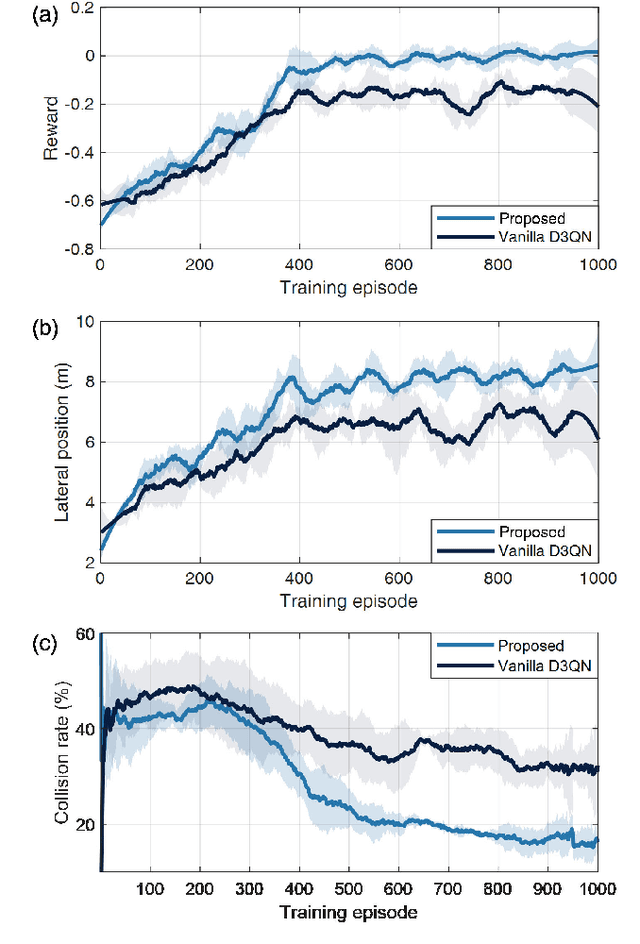
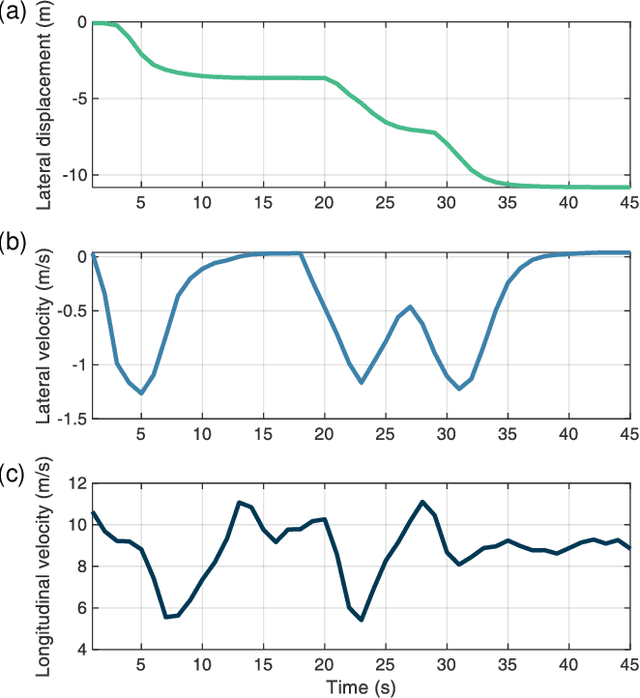
Decision-making is critical for lane change in autonomous driving. Reinforcement learning (RL) algorithms aim to identify the values of behaviors in various situations and thus they become a promising pathway to address the decision-making problem. However, poor runtime safety hinders RL-based decision-making strategies from complex driving tasks in practice. To address this problem, human demonstrations are incorporated into the RL-based decision-making strategy in this paper. Decisions made by human subjects in a driving simulator are treated as safe demonstrations, which are stored into the replay buffer and then utilized to enhance the training process of RL. A complex lane change task in an off-ramp scenario is established to examine the performance of the developed strategy. Simulation results suggest that human demonstrations can effectively improve the safety of decisions of RL. And the proposed strategy surpasses other existing learning-based decision-making strategies with respect to multiple driving performances.
Sampling Efficient Deep Reinforcement Learning through Preference-Guided Stochastic Exploration
Jun 20, 2022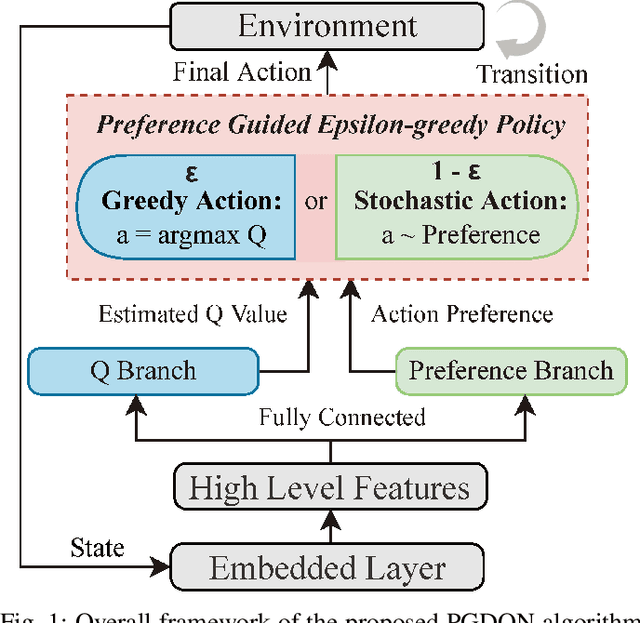
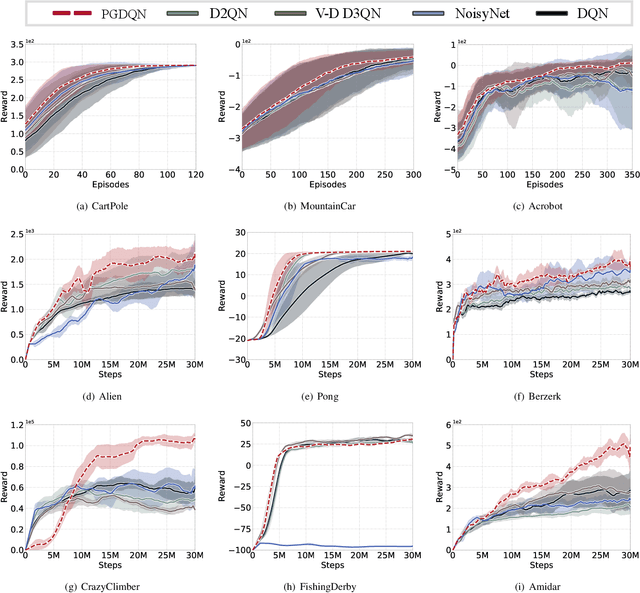
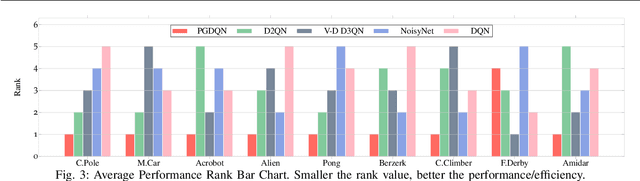
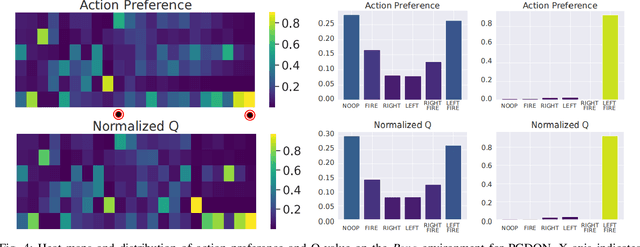
Massive practical works addressed by Deep Q-network (DQN) algorithm have indicated that stochastic policy, despite its simplicity, is the most frequently used exploration approach. However, most existing stochastic exploration approaches either explore new actions heuristically regardless of Q-values or inevitably introduce bias into the learning process to couple the sampling with Q-values. In this paper, we propose a novel preference-guided $\epsilon$-greedy exploration algorithm that can efficiently learn the action distribution in line with the landscape of Q-values for DQN without introducing additional bias. Specifically, we design a dual architecture consisting of two branches, one of which is a copy of DQN, namely the Q-branch. The other branch, which we call the preference branch, learns the action preference that the DQN implicit follows. We theoretically prove that the policy improvement theorem holds for the preference-guided $\epsilon$-greedy policy and experimentally show that the inferred action preference distribution aligns with the landscape of corresponding Q-values. Consequently, preference-guided $\epsilon$-greedy exploration motivates the DQN agent to take diverse actions, i.e., actions with larger Q-values can be sampled more frequently whereas actions with smaller Q-values still have a chance to be explored, thus encouraging the exploration. We assess the proposed method with four well-known DQN variants in nine different environments. Extensive results confirm the superiority of our proposed method in terms of performance and convergence speed. Index Terms- Preference-guided exploration, stochastic policy, data efficiency, deep reinforcement learning, deep Q-learning.
Graph Convolution-Based Deep Reinforcement Learning for Multi-Agent Decision-Making in Mixed Traffic Environments
Jan 30, 2022
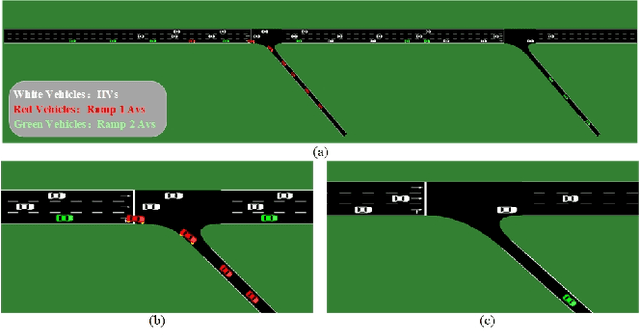
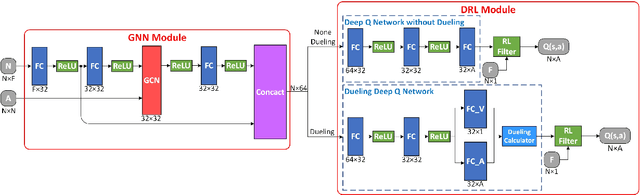
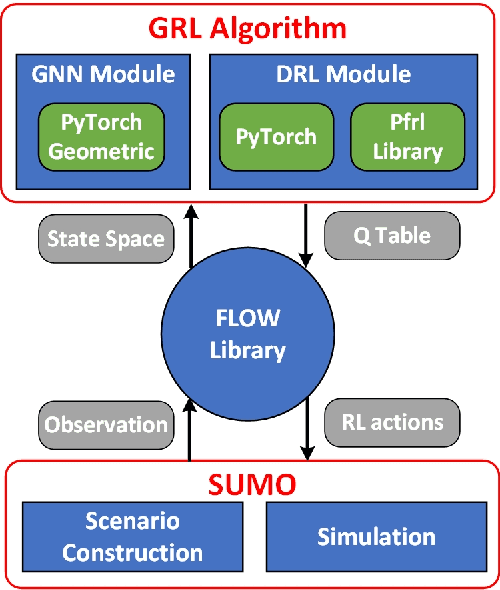
An efficient and reliable multi-agent decision-making system is highly demanded for the safe and efficient operation of connected autonomous vehicles in intelligent transportation systems. Current researches mainly focus on the Deep Reinforcement Learning (DRL) methods. However, utilizing DRL methods in interactive traffic scenarios is hard to represent the mutual effects between different vehicles and model the dynamic traffic environments due to the lack of interactive information in the representation of the environments, which results in low accuracy of cooperative decisions generation. To tackle these difficulties, this research proposes a framework to enable different Graph Reinforcement Learning (GRL) methods for decision-making, and compares their performance in interactive driving scenarios. GRL methods combinate the Graph Neural Network (GNN) and DRL to achieve the better decisions generation in interactive scenarios of autonomous vehicles, where the features of interactive scenarios are extracted by the GNN, and cooperative behaviors are generated by DRL framework. Several GRL approaches are summarized and implemented in the proposed framework. To evaluate the performance of the proposed GRL methods, an interactive driving scenarios on highway with two ramps is constructed, and simulated experiment in the SUMO platform is carried out to evaluate the performance of different GRL approaches. Finally, results are analyzed in multiple perspectives and dimensions to compare the characteristic of different GRL approaches in intelligent transportation scenarios. Results show that the implementation of GNN can well represents the interaction between vehicles, and the combination of GNN and DRL is able to improve the performance of the generation of lane-change behaviors. The source code of our work can be found at https://github.com/Jacklinkk/TorchGRL.
Prioritized Experience-based Reinforcement Learning with Human Guidance: Methdology and Application to Autonomous Driving
Sep 26, 2021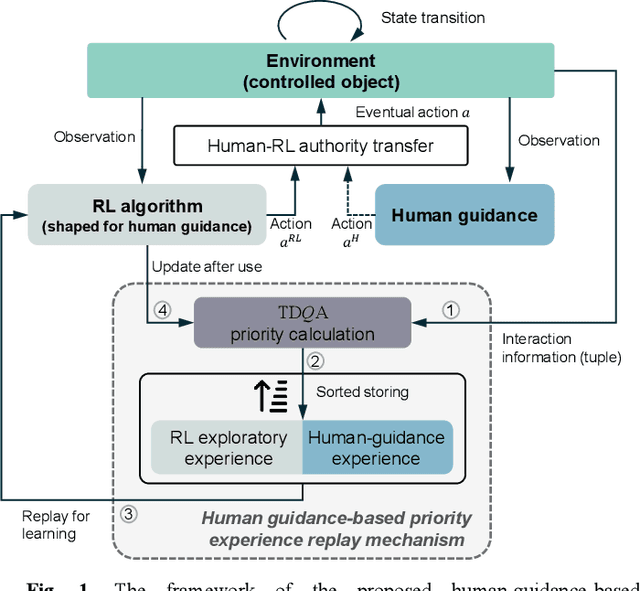
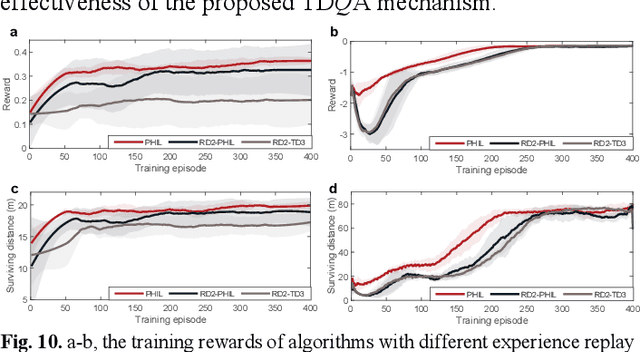
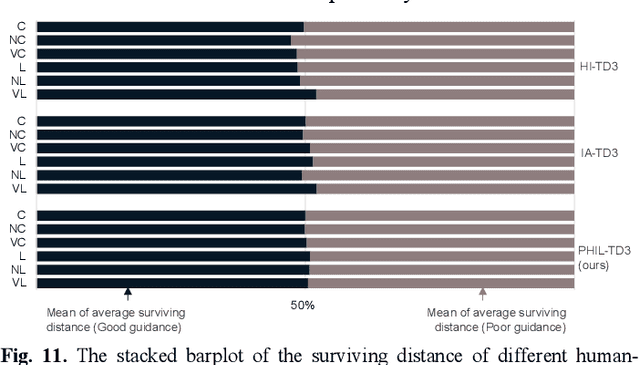
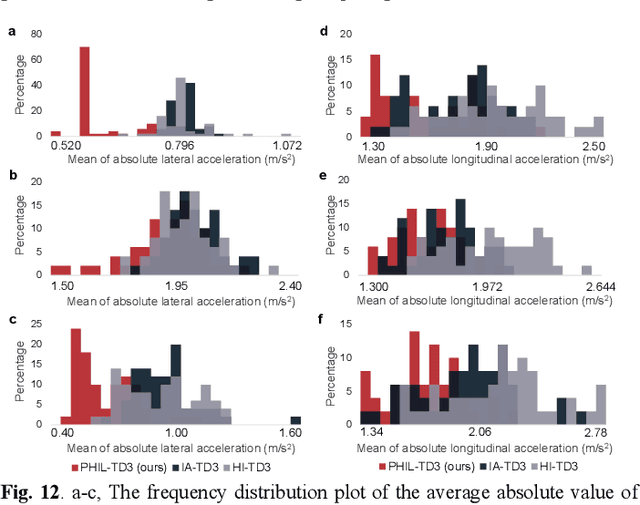
Reinforcement learning requires skillful definition and remarkable computational efforts to solve optimization and control problems, which could impair its prospect. Introducing human guidance into reinforcement learning is a promising way to improve learning performance. In this paper, a comprehensive human guidance-based reinforcement learning framework is established. A novel prioritized experience replay mechanism that adapts to human guidance in the reinforcement learning process is proposed to boost the efficiency and performance of the reinforcement learning algorithm. To relieve the heavy workload on human participants, a behavior model is established based on an incremental online learning method to mimic human actions. We design two challenging autonomous driving tasks for evaluating the proposed algorithm. Experiments are conducted to access the training and testing performance and learning mechanism of the proposed algorithm. Comparative results against the state-of-the-arts suggest the advantages of our algorithm in terms of learning efficiency, performance, and robustness.
Uncertainty-Aware Model-Based Reinforcement Learning with Application to Autonomous Driving
Jul 05, 2021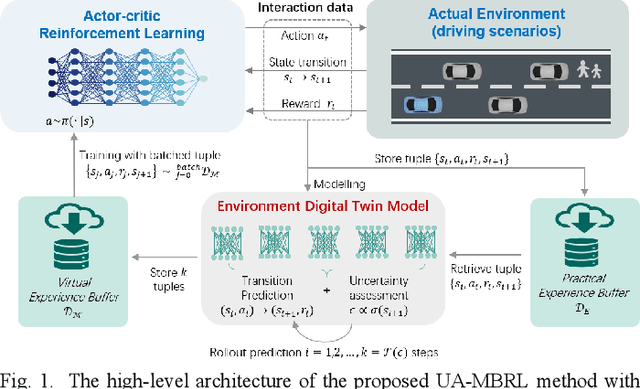
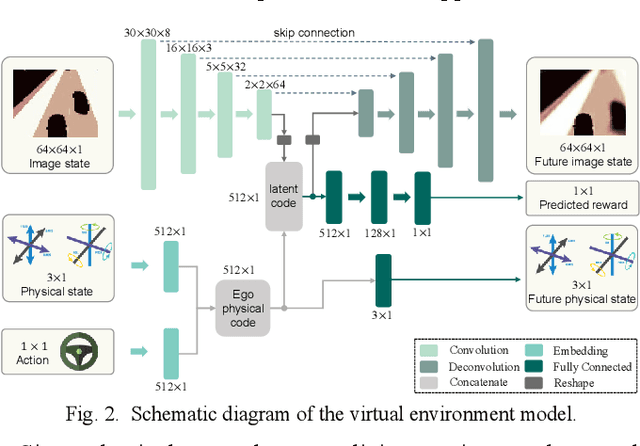
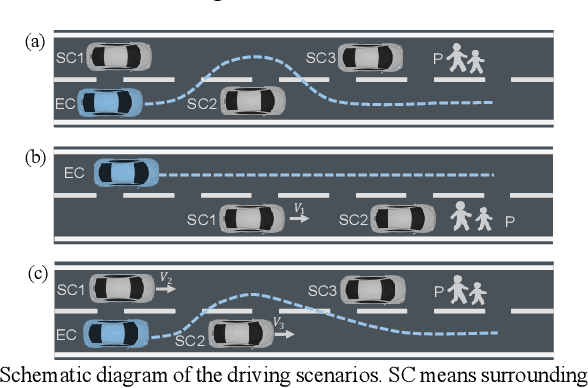
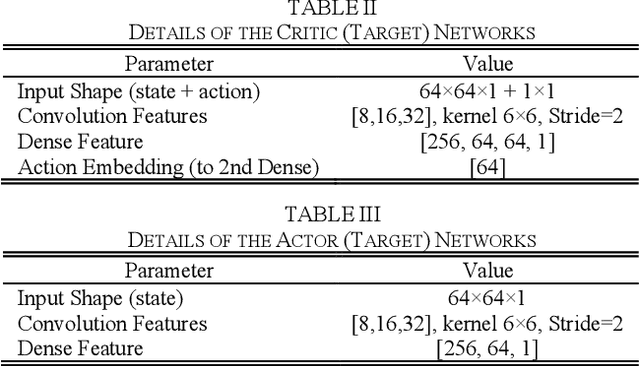
To further improve the learning efficiency and performance of reinforcement learning (RL), in this paper we propose a novel uncertainty-aware model-based RL (UA-MBRL) framework, and then implement and validate it in autonomous driving under various task scenarios. First, an action-conditioned ensemble model with the ability of uncertainty assessment is established as the virtual environment model. Then, a novel uncertainty-aware model-based RL framework is developed based on the adaptive truncation approach, providing virtual interactions between the agent and environment model, and improving RL's training efficiency and performance. The developed algorithms are then implemented in end-to-end autonomous vehicle control tasks, validated and compared with state-of-the-art methods under various driving scenarios. The validation results suggest that the proposed UA-MBRL method surpasses the existing model-based and model-free RL approaches, in terms of learning efficiency and achieved performance. The results also demonstrate the good ability of the proposed method with respect to the adaptiveness and robustness, under various autonomous driving scenarios.