 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Residual Safe Reinforcement Learning for Multi-Agent Safety-Critical Scenarios Decision-Making
Apr 09, 2025
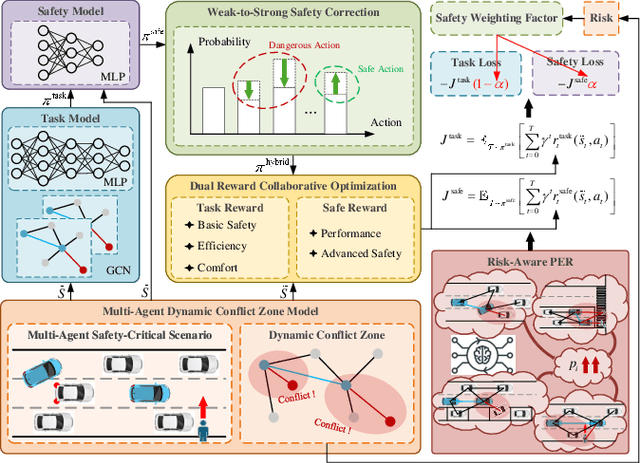
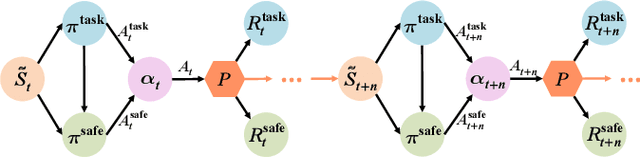
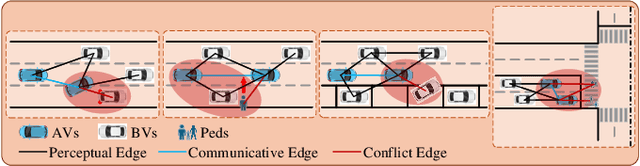
In multi-agent safety-critical scenarios, traditional autonomous driving frameworks face significant challenges in balancing safety constraints and task performance. These frameworks struggle to quantify dynamic interaction risks in real-time and depend heavily on manual rules, resulting in low computational efficiency and conservative strategies. To address these limitations, we propose a Dynamic Residual Safe Reinforcement Learning (DRS-RL) framework grounded in a safety-enhanced networked Markov decision process. It's the first time that the weak-to-strong theory is introduced into multi-agent decision-making, enabling lightweight dynamic calibration of safety boundaries via a weak-to-strong safety correction paradigm. Based on the multi-agent dynamic conflict zone model, our framework accurately captures spatiotemporal coupling risks among heterogeneous traffic participants and surpasses the static constraints of conventional geometric rules. Moreover, a risk-aware prioritized experience replay mechanism mitigates data distribution bias by mapping risk to sampling probability. Experimental results reveal that the proposed method significantly outperforms traditional RL algorithms in safety, efficiency, and comfort. Specifically, it reduces the collision rate by up to 92.17%, while the safety model accounts for merely 27% of the main model's parameters.
A Nested Graph Reinforcement Learning-based Decision-making Strategy for Eco-platooning
Aug 14, 2024Platooning technology is renowned for its precise vehicle control, traffic flow optimization, and energy efficiency enhancement. However, in large-scale mixed platoons, vehicle heterogeneity and unpredictable traffic conditions lead to virtual bottlenecks. These bottlenecks result in reduced traffic throughput and increased energy consumption within the platoon. To address these challenges, we introduce a decision-making strategy based on nested graph reinforcement learning. This strategy improves collaborative decision-making, ensuring energy efficiency and alleviating congestion. We propose a theory of nested traffic graph representation that maps dynamic interactions between vehicles and platoons in non-Euclidean spaces. By incorporating spatio-temporal weighted graph into a multi-head attention mechanism, we further enhance the model's capacity to process both local and global data. Additionally, we have developed a nested graph reinforcement learning framework to enhance the self-iterative learning capabilities of platooning. Using the I-24 dataset, we designed and conducted comparative algorithm experiments, generalizability testing, and permeability ablation experiments, thereby validating the proposed strategy's effectiveness. Compared to the baseline, our strategy increases throughput by 10% and decreases energy use by 9%. Specifically, increasing the penetration rate of CAVs significantly enhances traffic throughput, though it also increases energy consumption.
Leverage Weakly Annotation to Pixel-wise Annotation via Zero-shot Segment Anything Model for Molecular-empowered Learning
Aug 10, 2023Precise identification of multiple cell classes in high-resolution Giga-pixel whole slide imaging (WSI) is critical for various clinical scenarios. Building an AI model for this purpose typically requires pixel-level annotations, which are often unscalable and must be done by skilled domain experts (e.g., pathologists). However, these annotations can be prone to errors, especially when distinguishing between intricate cell types (e.g., podocytes and mesangial cells) using only visual inspection. Interestingly, a recent study showed that lay annotators, when using extra immunofluorescence (IF) images for reference (referred to as molecular-empowered learning), can sometimes outperform domain experts in labeling. Despite this, the resource-intensive task of manual delineation remains a necessity during the annotation process. In this paper, we explore the potential of bypassing pixel-level delineation by employing the recent segment anything model (SAM) on weak box annotation in a zero-shot learning approach. Specifically, we harness SAM's ability to produce pixel-level annotations from box annotations and utilize these SAM-generated labels to train a segmentation model. Our findings show that the proposed SAM-assisted molecular-empowered learning (SAM-L) can diminish the labeling efforts for lay annotators by only requiring weak box annotations. This is achieved without compromising annotation accuracy or the performance of the deep learning-based segmentation. This research represents a significant advancement in democratizing the annotation process for training pathological image segmentation, relying solely on non-expert annotators.
Graph Reinforcement Learning Application to Co-operative Decision-Making in Mixed Autonomy Traffic: Framework, Survey, and Challenges
Nov 06, 2022Proper functioning of connected and automated vehicles (CAVs) is crucial for the safety and efficiency of future intelligent transport systems. Meanwhile, transitioning to fully autonomous driving requires a long period of mixed autonomy traffic, including both CAVs and human-driven vehicles. Thus, collaboration decision-making for CAVs is essential to generate appropriate driving behaviors to enhance the safety and efficiency of mixed autonomy traffic. In recent years, deep reinforcement learning (DRL) has been widely used in solving decision-making problems. However, the existing DRL-based methods have been mainly focused on solving the decision-making of a single CAV. Using the existing DRL-based methods in mixed autonomy traffic cannot accurately represent the mutual effects of vehicles and model dynamic traffic environments. To address these shortcomings, this article proposes a graph reinforcement learning (GRL) approach for multi-agent decision-making of CAVs in mixed autonomy traffic. First, a generic and modular GRL framework is designed. Then, a systematic review of DRL and GRL methods is presented, focusing on the problems addressed in recent research. Moreover, a comparative study on different GRL methods is further proposed based on the designed framework to verify the effectiveness of GRL methods. Results show that the GRL methods can well optimize the performance of multi-agent decision-making for CAVs in mixed autonomy traffic compared to the DRL methods. Finally, challenges and future research directions are summarized. This study can provide a valuable research reference for solving the multi-agent decision-making problems of CAVs in mixed autonomy traffic and can promote the implementation of GRL-based methods into intelligent transportation systems. The source code of our work can be found at https://github.com/Jacklinkk/Graph_CAVs.
Graph Convolution-Based Deep Reinforcement Learning for Multi-Agent Decision-Making in Mixed Traffic Environments
Jan 30, 2022
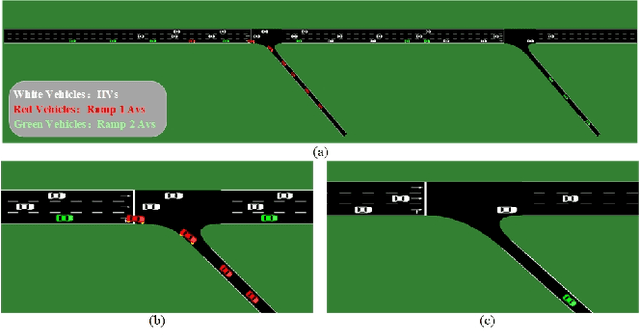
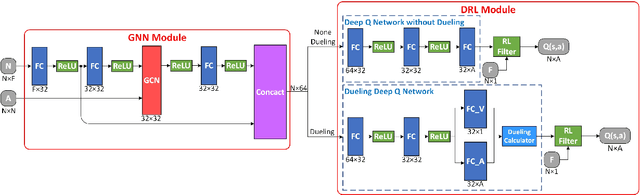
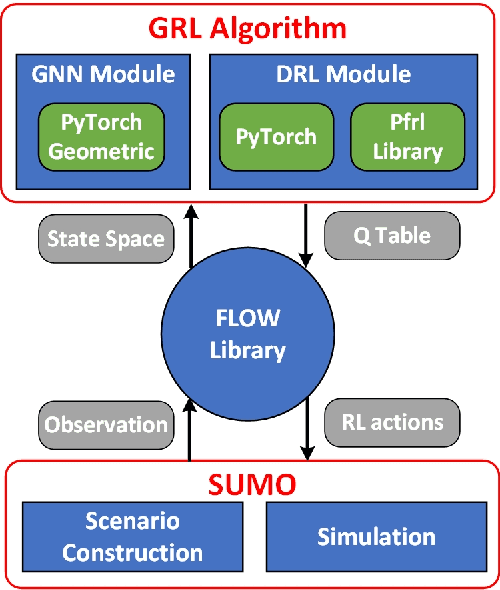
An efficient and reliable multi-agent decision-making system is highly demanded for the safe and efficient operation of connected autonomous vehicles in intelligent transportation systems. Current researches mainly focus on the Deep Reinforcement Learning (DRL) methods. However, utilizing DRL methods in interactive traffic scenarios is hard to represent the mutual effects between different vehicles and model the dynamic traffic environments due to the lack of interactive information in the representation of the environments, which results in low accuracy of cooperative decisions generation. To tackle these difficulties, this research proposes a framework to enable different Graph Reinforcement Learning (GRL) methods for decision-making, and compares their performance in interactive driving scenarios. GRL methods combinate the Graph Neural Network (GNN) and DRL to achieve the better decisions generation in interactive scenarios of autonomous vehicles, where the features of interactive scenarios are extracted by the GNN, and cooperative behaviors are generated by DRL framework. Several GRL approaches are summarized and implemented in the proposed framework. To evaluate the performance of the proposed GRL methods, an interactive driving scenarios on highway with two ramps is constructed, and simulated experiment in the SUMO platform is carried out to evaluate the performance of different GRL approaches. Finally, results are analyzed in multiple perspectives and dimensions to compare the characteristic of different GRL approaches in intelligent transportation scenarios. Results show that the implementation of GNN can well represents the interaction between vehicles, and the combination of GNN and DRL is able to improve the performance of the generation of lane-change behaviors. The source code of our work can be found at https://github.com/Jacklinkk/TorchGRL.
Decision-Making Technology for Autonomous Vehicles Learning-Based Methods, Applications and Future Outlook
Jul 02, 2021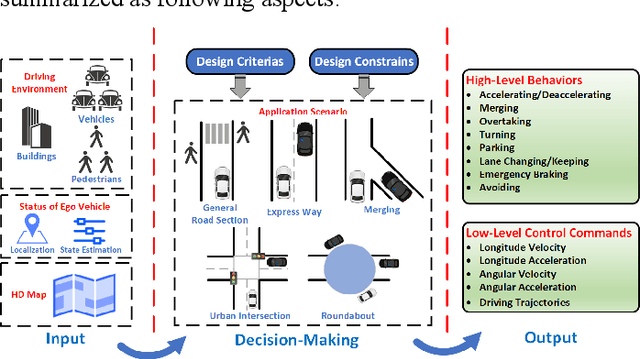
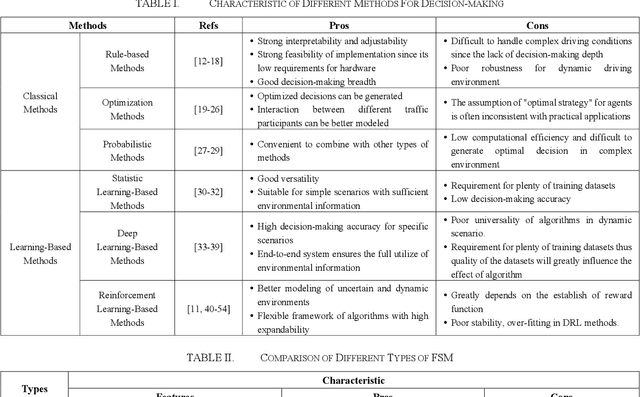
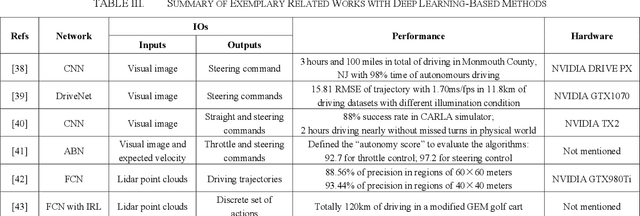
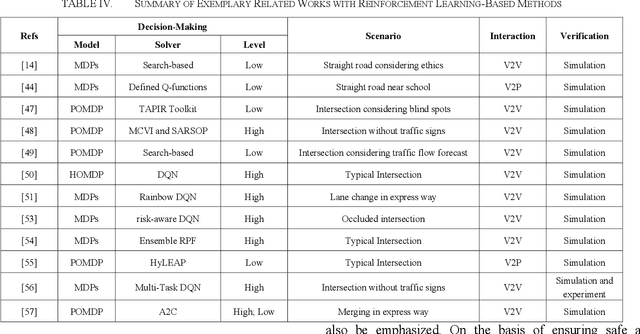
Autonomous vehicles have a great potential in the application of both civil and military fields, and have become the focus of research with the rapid development of science and economy. This article proposes a brief review on learning-based decision-making technology for autonomous vehicles since it is significant for safer and efficient performance of autonomous vehicles. Firstly, the basic outline of decision-making technology is provided. Secondly, related works about learning-based decision-making methods for autonomous vehicles are mainly reviewed with the comparison to classical decision-making methods. In addition, applications of decision-making methods in existing autonomous vehicles are summarized. Finally, promising research topics in the future study of decision-making technology for autonomous vehicles are prospected.
Uncovering Interpretable Internal States of Merging Tasks at Highway On-Ramps for Autonomous Driving Decision-Making
Feb 15, 2021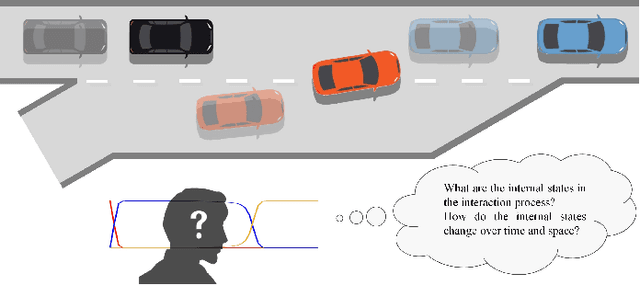
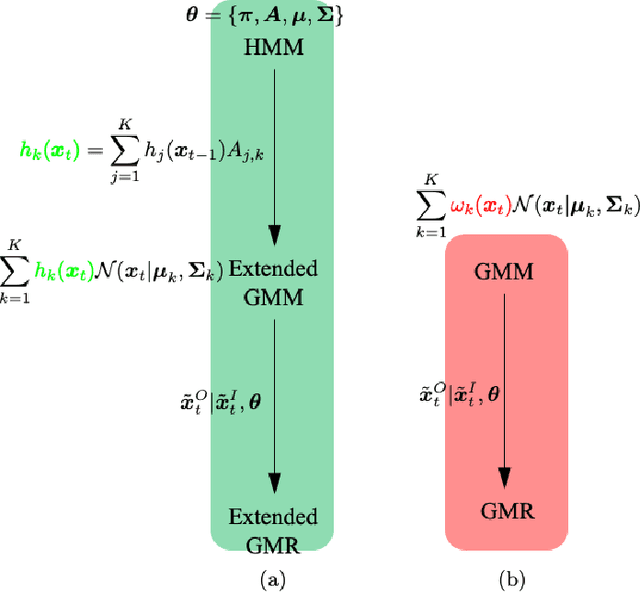
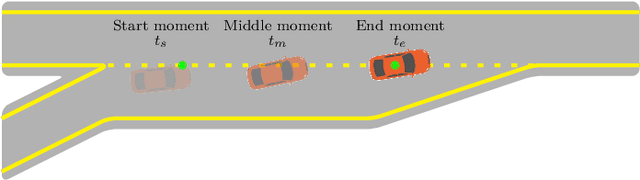
Humans make daily-routine decisions based on their internal states in intricate interaction scenarios. This paper presents a probabilistically reconstructive learning approach to identify the internal states of multi-vehicle sequential interactions when merging at highway on-ramps. We treated the merging task's sequential decision as a dynamic, stochastic process and then integrated the internal states into an HMM-GMR model, a probabilistic combination of an extended Gaussian mixture regression (GMR) and hidden Markov models (HMM). We also developed a variant expectation-maximum (EM) algorithm to estimate the model parameters and verified them based on a real-world data set. Experimental results reveal that the interactive merge procedure at highway on-ramps can be semantically described by three interpretable internal states. This finding provides a basis for autonomous vehicles to develop a model-based decision-making algorithm in a partially observable environment.
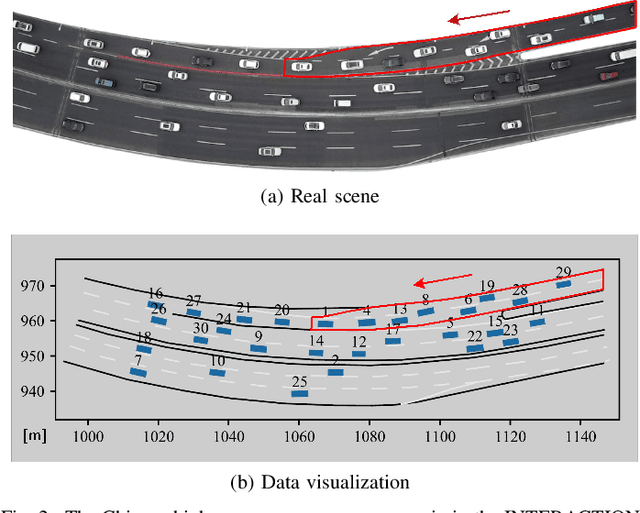
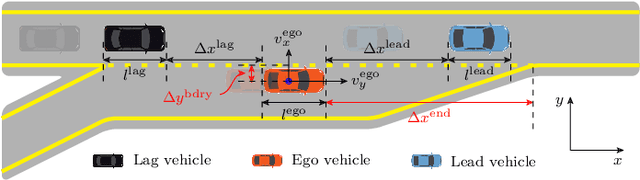
On Social Interactions of Merging Behaviors at Highway On-Ramps in Congested Traffic
Aug 14, 2020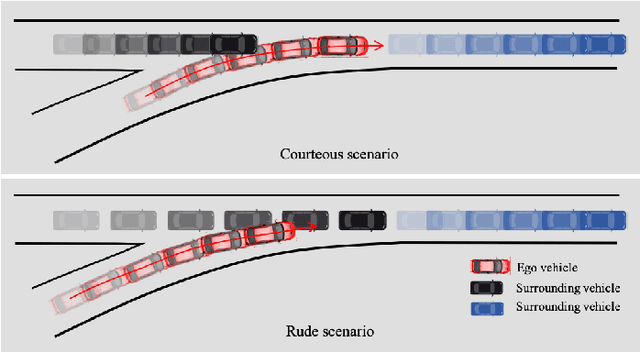
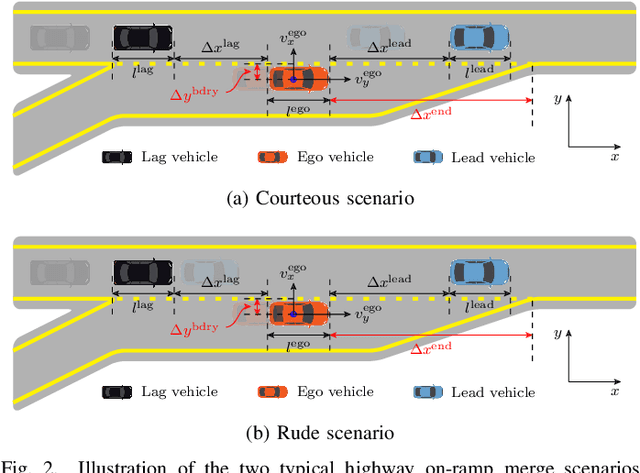

Merging at highway on-ramps while interacting with other human-driven vehicles is challenging for autonomous vehicles (AVs). An efficient route to this challenge requires exploring and then exploiting knowledge of the interaction process from demonstrations by humans. However, it is unclear what information (or the environment states) is utilized by the human driver to guide their behavior over the whole merging process. This paper provides quantitative analysis and evaluation of the merging behavior at highway on-ramps with congested traffic in a volume of time and space. Two types of social interaction scenarios are considered based on the social preferences of surrounding vehicles: courteous and rude. The significant levels of environment states for characterizing the interactive merging process are empirically analyzed based on the real-world INTERACTION dataset. Experimental results reveal two fundamental mechanisms in the merging process: 1) Human driver selects different states to make sequential decisions at different moments of task execution and 2) the social preference of surrounding vehicles has an impact on variable selection for making decisions. It implies that for autonomous driving, efficient decision-making design should filter out irrelevant information while considering the social preference of the surrounding vehicles, to reach a comparable human-level performance. These essential findings shed light on developing new decision-making approaches for AVs.
Research on Control Method and Evaluation System of Ground Unmanned Vehicle Formation Transform
Aug 05, 2018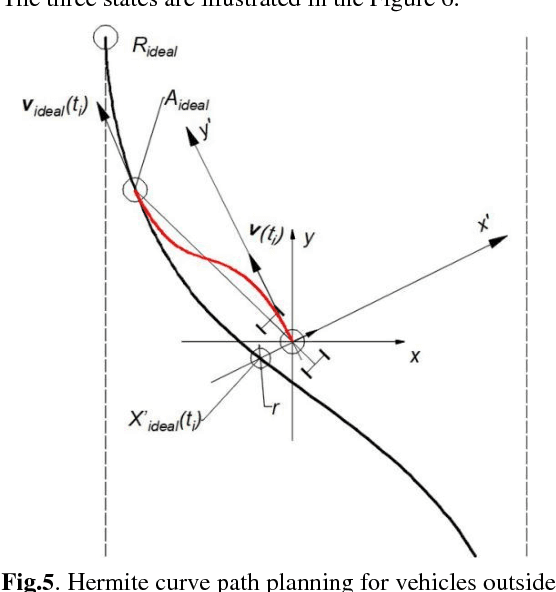
In this paper,we design a formation control systrm for multi-unmanned ground vehicles(UGV) from the prospective of path planning and path tracking.The master-slave control is adopted by electing out a main vehicle to address the problem of possible accumulation,tranmission and amplification of errors.In the process of formation transformation,we first generate an expected path by combing the methods of dynamic window and potential energy field.Then a path tracking algorithm based on Hermite curve is adopted to make the formation transformation process more stable and accurate.Finally,the evaluation system of the formation control system is constructed,which combines the expected position,the actual position,the expected speed, the actual speed and the actual acceleration,giving an evalutaion on the performance of the formation transformation,response of the formation driving process and the performance of the formation stability.