 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Social Interactions of Merging Behaviors at Highway On-Ramps in Congested Traffic
Paper and Code
Aug 14, 2020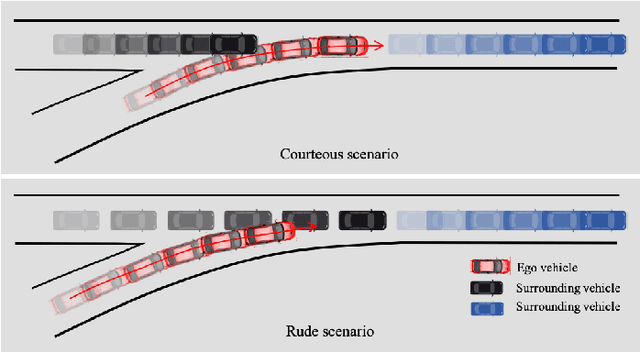
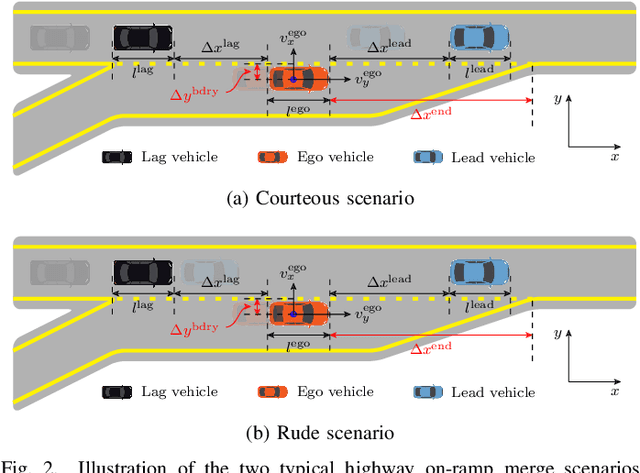
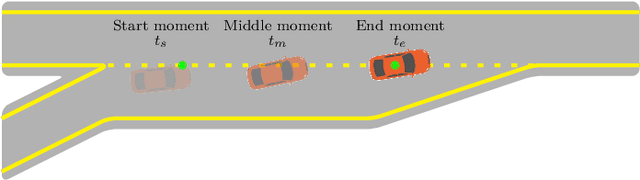

Merging at highway on-ramps while interacting with other human-driven vehicles is challenging for autonomous vehicles (AVs). An efficient route to this challenge requires exploring and then exploiting knowledge of the interaction process from demonstrations by humans. However, it is unclear what information (or the environment states) is utilized by the human driver to guide their behavior over the whole merging process. This paper provides quantitative analysis and evaluation of the merging behavior at highway on-ramps with congested traffic in a volume of time and space. Two types of social interaction scenarios are considered based on the social preferences of surrounding vehicles: courteous and rude. The significant levels of environment states for characterizing the interactive merging process are empirically analyzed based on the real-world INTERACTION dataset. Experimental results reveal two fundamental mechanisms in the merging process: 1) Human driver selects different states to make sequential decisions at different moments of task execution and 2) the social preference of surrounding vehicles has an impact on variable selection for making decisions. It implies that for autonomous driving, efficient decision-making design should filter out irrelevant information while considering the social preference of the surrounding vehicles, to reach a comparable human-level performance. These essential findings shed light on developing new decision-making approaches for AVs.