 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDREAM: Dynamic Refinement of Early Assignment Mappings
Jun 05, 2026Generative recommendation advances item retrieval by reformulating it as autoregressive generation of Semantic IDs (SIDs), compact token sequences that encode item semantics. While SIDs offer a strong semantic prior, current SID-based methods assign each item a single static identifier through offline tokenization before sufficient user feedback is observed. For cold-start items, this one-shot commitment produces poorly discriminative codes, generating misaligned paths that remain unrefined because the associated tokens are rarely sampled during training. We identify this early static commitment, not model capacity, as the fundamental cold-start bottleneck in SID-based generative recommendation. To overcome this bottleneck and bridge the disjoint objectives of tokenization and generation, we propose DREAM (Dynamic Refinement of Early Assignment Mappings), a three-stage framework that resolves this flaw through progressive refinement. First, an intent-aware tokenizer rebuilds the SID space through counterfactual contrastive learning, generating a diverse pool of behavior-aligned candidates per cold-start item. Second, the frozen recommendation backbone serves as an evaluator, selecting the most reliable candidate based on multi-context user support without retraining. Third, a dynamic beam mechanism maintains multiple weighted SID hypotheses throughout training and inference, preventing premature collapse to a single assignment. Extensive experiments on three Amazon benchmarks show that DREAM substantially outperforms state-of-the-art generative and sequential baselines on cold-start metrics.
OneReason Technical Report
Jun 04, 2026Generative recommendation models in the OneRec family have been widely deployed in many real-world services, such as short-video, live-streaming, advertising, and e-commerce. However, these generative models can only benefit from the scaling advantage, while their reasoning ability is hard to activate, since we cannot construct meaningful Chain-of-Thought (CoT) sequences consisting of itemic tokens only. Inspired by the success of the reasoning-style ``think before answer'' paradigm in the LLM field, we conduct preliminary studies (i.e., OneRec-Think, OpenOneRec) to explore reasoning capability in generative recommendation. Nevertheless, we notice an unexpected phenomenon: the thinking mode does not show advantages over the non-thinking mode. Drawing insights from recent findings on CoT robustness in multi-modal language models, we argue that effective reasoning in recommendation rests on two factors: perception, the ability to ground itemic tokens in their underlying language semantics, and cognition, the ability to reorganize a user's behavior sequence into coherent latent interest points. We therefore propose OneReason, which includes: (1) strong itemic token perception in pre-training, (2) a three-level cognition-enhanced CoT format for recommendation tasks in SFT, and (3) a specialize-then-unify training recipe in RL to enhance the thinking ability.
PIT: A Dynamic Personalized Item Tokenizer for End-to-End Generative Recommendation
Feb 09, 2026Generative Recommendation has revolutionized recommender systems by reformulating retrieval as a sequence generation task over discrete item identifiers. Despite the progress, existing approaches typically rely on static, decoupled tokenization that ignores collaborative signals. While recent methods attempt to integrate collaborative signals into item identifiers either during index construction or through end-to-end modeling, they encounter significant challenges in real-world production environments. Specifically, the volatility of collaborative signals leads to unstable tokenization, and current end-to-end strategies often devolve into suboptimal two-stage training rather than achieving true co-evolution. To bridge this gap, we propose PIT, a dynamic Personalized Item Tokenizer framework for end-to-end generative recommendation, which employs a co-generative architecture that harmonizes collaborative patterns through collaborative signal alignment and synchronizes item tokenizer with generative recommender via a co-evolution learning. This enables the dynamic, joint, end-to-end evolution of both index construction and recommendation. Furthermore, a one-to-many beam index ensures scalability and robustness, facilitating seamless integration into large-scale industrial deployments. Extensive experiments on real-world datasets demonstrate that PIT consistently outperforms competitive baselines. In a large-scale deployment at Kuaishou, an online A/B test yielded a substantial 0.402% uplift in App Stay Time, validating the framework's effectiveness in dynamic industrial environments.
OpenOneRec Technical Report
Dec 31, 2025While the OneRec series has successfully unified the fragmented recommendation pipeline into an end-to-end generative framework, a significant gap remains between recommendation systems and general intelligence. Constrained by isolated data, they operate as domain specialists-proficient in pattern matching but lacking world knowledge, reasoning capabilities, and instruction following. This limitation is further compounded by the lack of a holistic benchmark to evaluate such integrated capabilities. To address this, our contributions are: 1) RecIF Bench & Open Data: We propose RecIF-Bench, a holistic benchmark covering 8 diverse tasks that thoroughly evaluate capabilities from fundamental prediction to complex reasoning. Concurrently, we release a massive training dataset comprising 96 million interactions from 160,000 users to facilitate reproducible research. 2) Framework & Scaling: To ensure full reproducibility, we open-source our comprehensive training pipeline, encompassing data processing, co-pretraining, and post-training. Leveraging this framework, we demonstrate that recommendation capabilities can scale predictably while mitigating catastrophic forgetting of general knowledge. 3) OneRec-Foundation: We release OneRec Foundation (1.7B and 8B), a family of models establishing new state-of-the-art (SOTA) results across all tasks in RecIF-Bench. Furthermore, when transferred to the Amazon benchmark, our models surpass the strongest baselines with an average 26.8% improvement in Recall@10 across 10 diverse datasets (Figure 1). This work marks a step towards building truly intelligent recommender systems. Nonetheless, realizing this vision presents significant technical and theoretical challenges, highlighting the need for broader research engagement in this promising direction.
OneRec-V2 Technical Report
Aug 28, 2025



Recent breakthroughs in generative AI have transformed recommender systems through end-to-end generation. OneRec reformulates recommendation as an autoregressive generation task, achieving high Model FLOPs Utilization. While OneRec-V1 has shown significant empirical success in real-world deployment, two critical challenges hinder its scalability and performance: (1) inefficient computational allocation where 97.66% of resources are consumed by sequence encoding rather than generation, and (2) limitations in reinforcement learning relying solely on reward models. To address these challenges, we propose OneRec-V2, featuring: (1) Lazy Decoder-Only Architecture: Eliminates encoder bottlenecks, reducing total computation by 94% and training resources by 90%, enabling successful scaling to 8B parameters. (2) Preference Alignment with Real-World User Interactions: Incorporates Duration-Aware Reward Shaping and Adaptive Ratio Clipping to better align with user preferences using real-world feedback. Extensive A/B tests on Kuaishou demonstrate OneRec-V2's effectiveness, improving App Stay Time by 0.467%/0.741% while balancing multi-objective recommendations. This work advances generative recommendation scalability and alignment with real-world feedback, representing a step forward in the development of end-to-end recommender systems.
OneRec Technical Report
Jun 16, 2025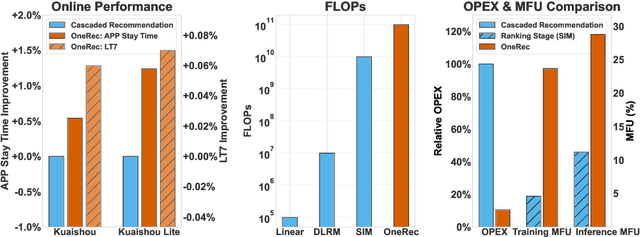

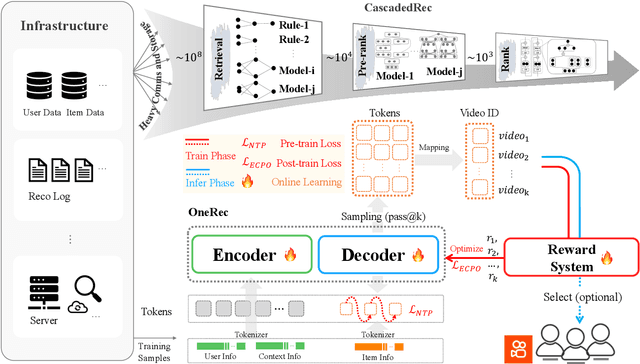

Recommender systems have been widely used in various large-scale user-oriented platforms for many years. However, compared to the rapid developments in the AI community, recommendation systems have not achieved a breakthrough in recent years. For instance, they still rely on a multi-stage cascaded architecture rather than an end-to-end approach, leading to computational fragmentation and optimization inconsistencies, and hindering the effective application of key breakthrough technologies from the AI community in recommendation scenarios. To address these issues, we propose OneRec, which reshapes the recommendation system through an end-to-end generative approach and achieves promising results. Firstly, we have enhanced the computational FLOPs of the current recommendation model by 10 $\times$ and have identified the scaling laws for recommendations within certain boundaries. Secondly, reinforcement learning techniques, previously difficult to apply for optimizing recommendations, show significant potential in this framework. Lastly, through infrastructure optimizations, we have achieved 23.7% and 28.8% Model FLOPs Utilization (MFU) on flagship GPUs during training and inference, respectively, aligning closely with the LLM community. This architecture significantly reduces communication and storage overhead, resulting in operating expense that is only 10.6% of traditional recommendation pipelines. Deployed in Kuaishou/Kuaishou Lite APP, it handles 25% of total queries per second, enhancing overall App Stay Time by 0.54% and 1.24%, respectively. Additionally, we have observed significant increases in metrics such as 7-day Lifetime, which is a crucial indicator of recommendation experience. We also provide practical lessons and insights derived from developing, optimizing, and maintaining a production-scale recommendation system with significant real-world impact.
On Trustworthy Decision-Making Process of Human Drivers from the View of Perceptual Uncertainty Reduction
Oct 15, 2022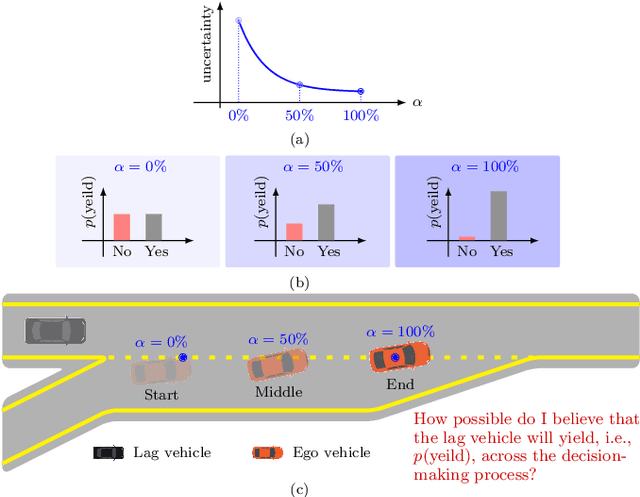
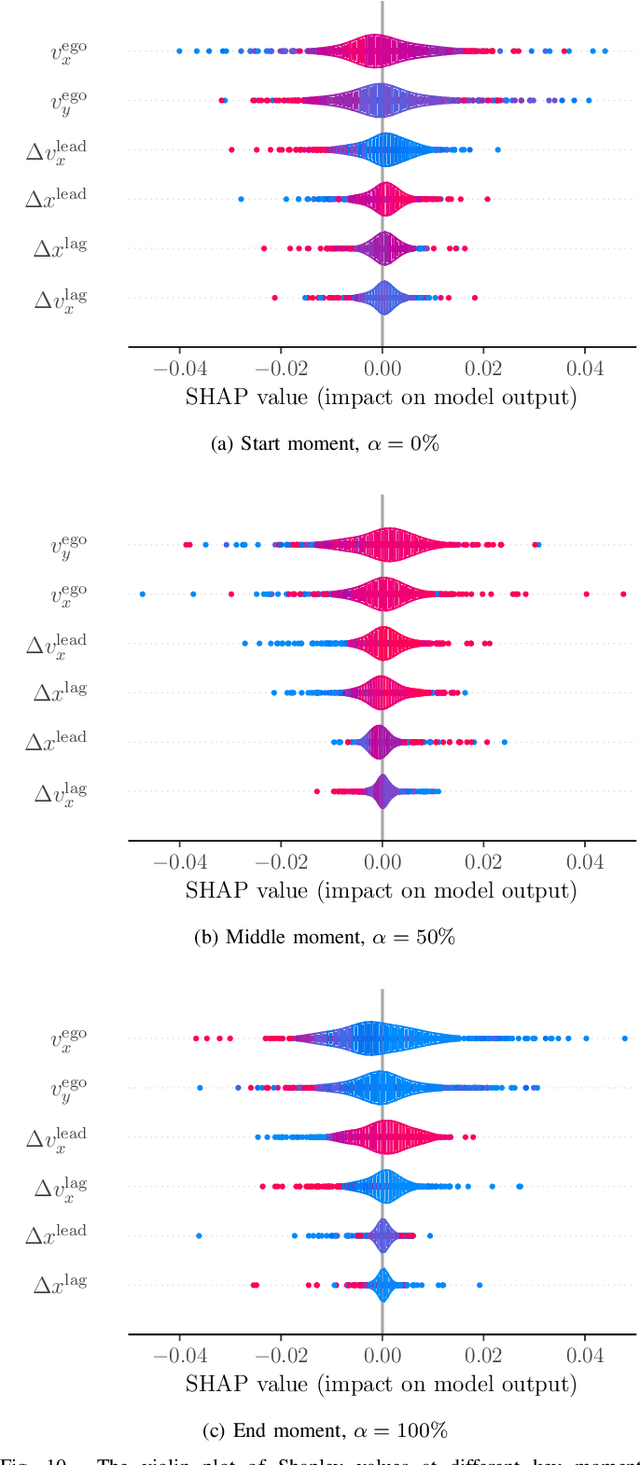
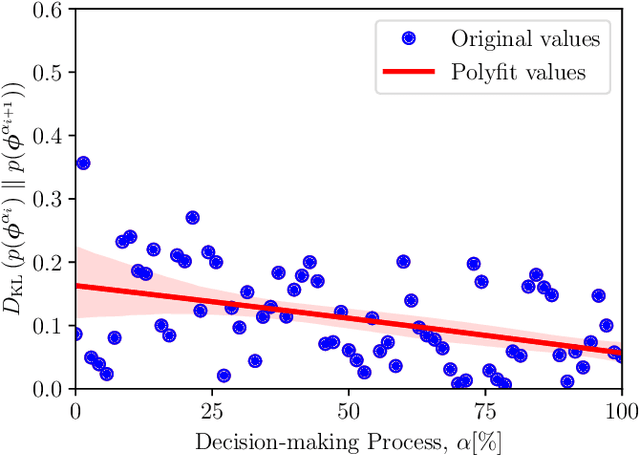
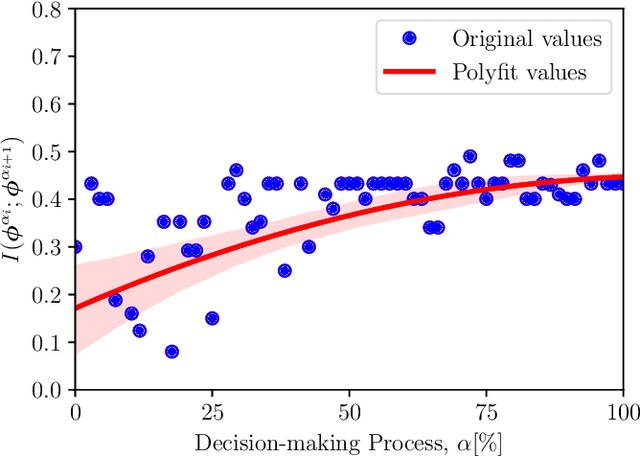
Humans are experts in making decisions for challenging driving tasks with uncertainties. Many efforts have been made to model the decision-making process of human drivers at the behavior level. However, limited studies explain how human drivers actively make reliable sequential decisions to complete interactive driving tasks in an uncertain environment. This paper argues that human drivers intently search for actions to reduce the uncertainty of their perception of the environment, i.e., perceptual uncertainty, to a low level that allows them to make a trustworthy decision easily. This paper provides a proof of concept framework to empirically reveal that human drivers' perceptual uncertainty decreases when executing interactive tasks with uncertainties. We first introduce an explainable-artificial intelligence approach (i.e., SHapley Additive exPlanation, SHAP) to determine the salient features on which human drivers make decisions. Then, we use entropy-based measures to quantify the drivers' perceptual changes in these ranked salient features across the decision-making process, reflecting the changes in uncertainties. The validation and verification of our proposed method are conducted in the highway on-ramp merging scenario with congested traffic using the INTERACTION dataset. Experimental results support that human drivers intentionally seek information to reduce their perceptual uncertainties in the number and rank of salient features of their perception of environments to make a trustworthy decision.
Uncovering Interpretable Internal States of Merging Tasks at Highway On-Ramps for Autonomous Driving Decision-Making
Feb 15, 2021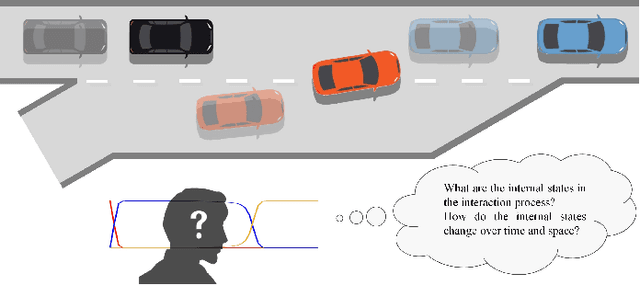
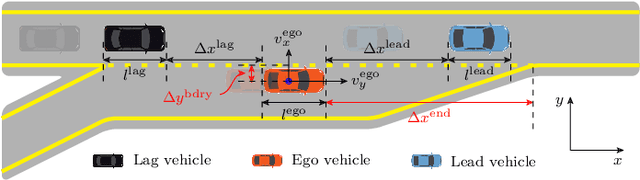
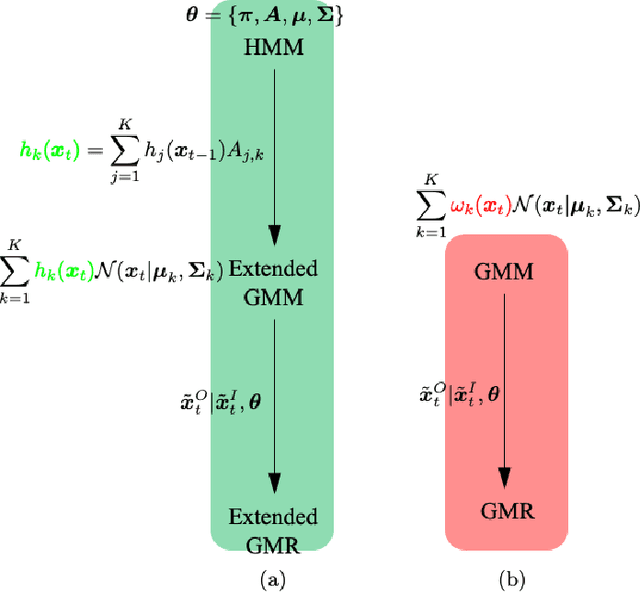
Humans make daily-routine decisions based on their internal states in intricate interaction scenarios. This paper presents a probabilistically reconstructive learning approach to identify the internal states of multi-vehicle sequential interactions when merging at highway on-ramps. We treated the merging task's sequential decision as a dynamic, stochastic process and then integrated the internal states into an HMM-GMR model, a probabilistic combination of an extended Gaussian mixture regression (GMR) and hidden Markov models (HMM). We also developed a variant expectation-maximum (EM) algorithm to estimate the model parameters and verified them based on a real-world data set. Experimental results reveal that the interactive merge procedure at highway on-ramps can be semantically described by three interpretable internal states. This finding provides a basis for autonomous vehicles to develop a model-based decision-making algorithm in a partially observable environment.
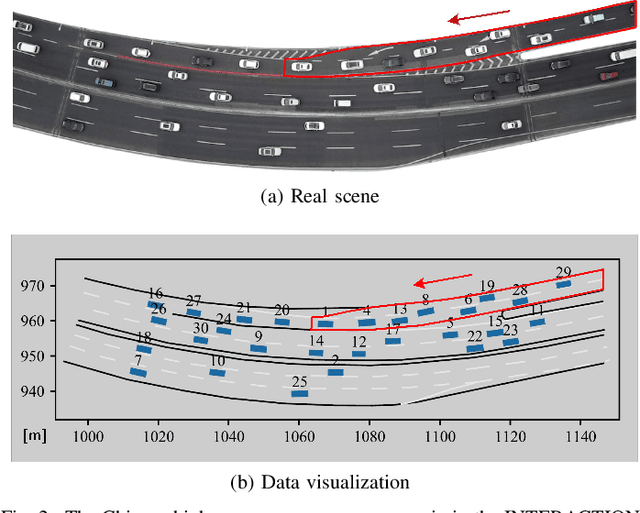
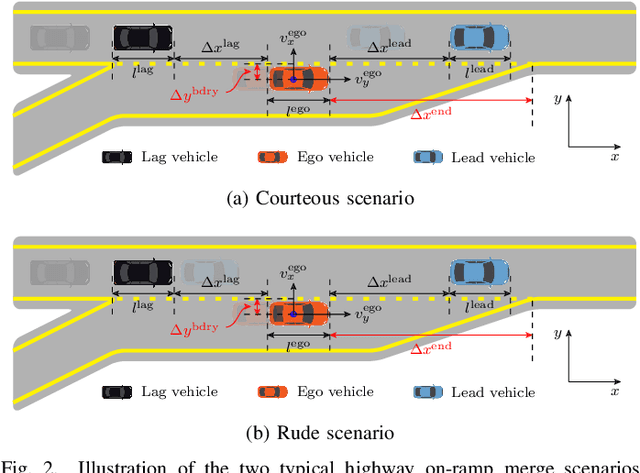
On Social Interactions of Merging Behaviors at Highway On-Ramps in Congested Traffic
Aug 14, 2020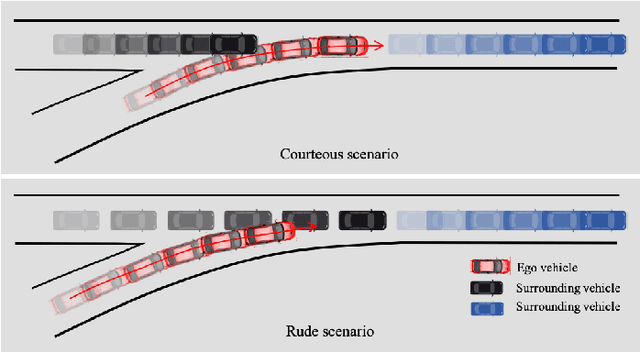

Merging at highway on-ramps while interacting with other human-driven vehicles is challenging for autonomous vehicles (AVs). An efficient route to this challenge requires exploring and then exploiting knowledge of the interaction process from demonstrations by humans. However, it is unclear what information (or the environment states) is utilized by the human driver to guide their behavior over the whole merging process. This paper provides quantitative analysis and evaluation of the merging behavior at highway on-ramps with congested traffic in a volume of time and space. Two types of social interaction scenarios are considered based on the social preferences of surrounding vehicles: courteous and rude. The significant levels of environment states for characterizing the interactive merging process are empirically analyzed based on the real-world INTERACTION dataset. Experimental results reveal two fundamental mechanisms in the merging process: 1) Human driver selects different states to make sequential decisions at different moments of task execution and 2) the social preference of surrounding vehicles has an impact on variable selection for making decisions. It implies that for autonomous driving, efficient decision-making design should filter out irrelevant information while considering the social preference of the surrounding vehicles, to reach a comparable human-level performance. These essential findings shed light on developing new decision-making approaches for AVs.