 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResearch on Control Method and Evaluation System of Ground Unmanned Vehicle Formation Transform
Aug 05, 2018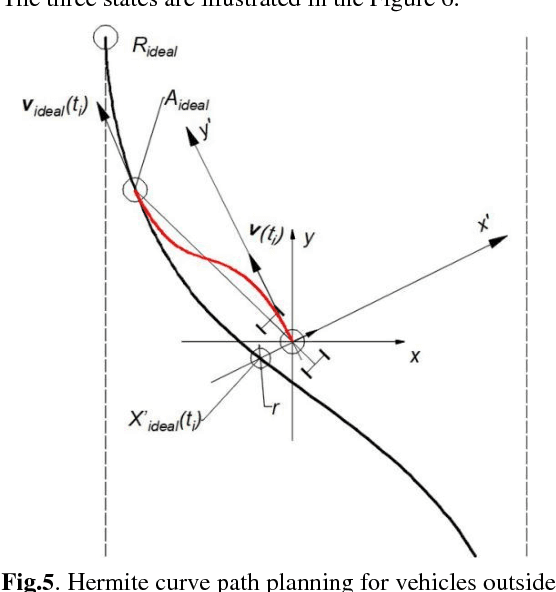
In this paper,we design a formation control systrm for multi-unmanned ground vehicles(UGV) from the prospective of path planning and path tracking.The master-slave control is adopted by electing out a main vehicle to address the problem of possible accumulation,tranmission and amplification of errors.In the process of formation transformation,we first generate an expected path by combing the methods of dynamic window and potential energy field.Then a path tracking algorithm based on Hermite curve is adopted to make the formation transformation process more stable and accurate.Finally,the evaluation system of the formation control system is constructed,which combines the expected position,the actual position,the expected speed, the actual speed and the actual acceleration,giving an evalutaion on the performance of the formation transformation,response of the formation driving process and the performance of the formation stability.