 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA new method for optical steel rope non-destructive damage detection
Feb 09, 2024


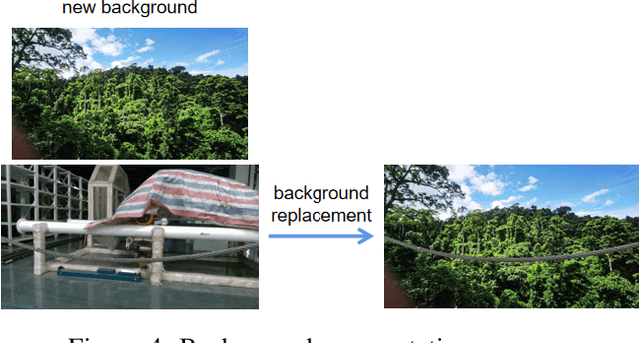
This paper presents a novel algorithm for non-destructive damage detection for steel ropes in high-altitude environments (aerial ropeway). The algorithm comprises two key components: First, a segmentation model named RGBD-UNet is designed to accurately extract steel ropes from complex backgrounds. This model is equipped with the capability to process and combine color and depth information through the proposed CMA module. Second, a detection model named VovNetV3.5 is developed to differentiate between normal and abnormal steel ropes. It integrates the VovNet architecture with a DBB module to enhance performance. Besides, a novel background augmentation method is proposed to enhance the generalization ability of the segmentation model. Datasets containing images of steel ropes in different scenarios are created for the training and testing of both the segmentation and detection models. Experiments demonstrate a significant improvement over baseline models. On the proposed dataset, the highest accuracy achieved by the detection model reached 0.975, and the maximum F-measure achieved by the segmentation model reached 0.948.
Semi-Supervised Cross-Modal Salient Object Detection with U-Structure Networks
Aug 08, 2022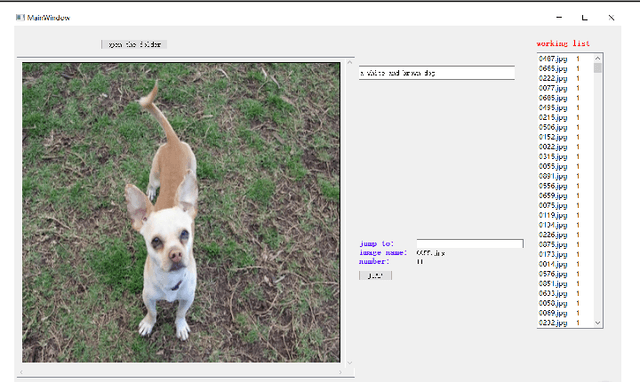
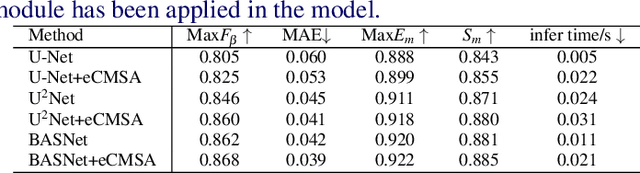
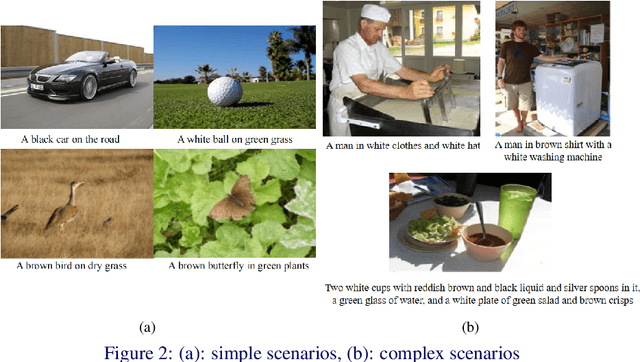
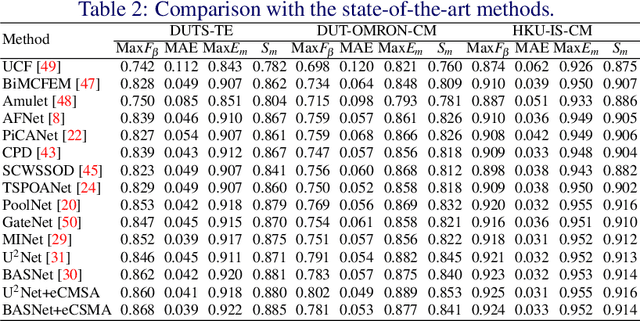
Salient Object Detection (SOD) is a popular and important topic aimed at precise detection and segmentation of the interesting regions in the images. We integrate the linguistic information into the vision-based U-Structure networks designed for salient object detection tasks. The experiments are based on the newly created DUTS Cross Modal (DUTS-CM) dataset, which contains both visual and linguistic labels. We propose a new module called efficient Cross-Modal Self-Attention (eCMSA) to combine visual and linguistic features and improve the performance of the original U-structure networks. Meanwhile, to reduce the heavy burden of labeling, we employ a semi-supervised learning method by training an image caption model based on the DUTS-CM dataset, which can automatically label other datasets like DUT-OMRON and HKU-IS. The comprehensive experiments show that the performance of SOD can be improved with the natural language input and is competitive compared with other SOD methods.
Research on Control Method and Evaluation System of Ground Unmanned Vehicle Formation Transform
Aug 05, 2018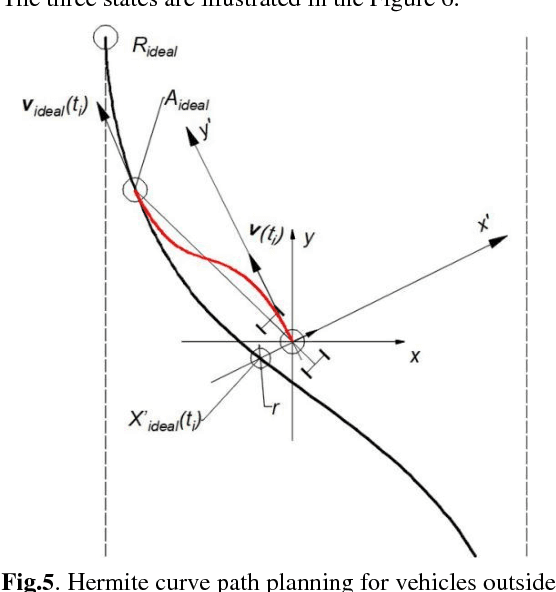
In this paper,we design a formation control systrm for multi-unmanned ground vehicles(UGV) from the prospective of path planning and path tracking.The master-slave control is adopted by electing out a main vehicle to address the problem of possible accumulation,tranmission and amplification of errors.In the process of formation transformation,we first generate an expected path by combing the methods of dynamic window and potential energy field.Then a path tracking algorithm based on Hermite curve is adopted to make the formation transformation process more stable and accurate.Finally,the evaluation system of the formation control system is constructed,which combines the expected position,the actual position,the expected speed, the actual speed and the actual acceleration,giving an evalutaion on the performance of the formation transformation,response of the formation driving process and the performance of the formation stability.