 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Residual Safe Reinforcement Learning for Multi-Agent Safety-Critical Scenarios Decision-Making
Apr 09, 2025
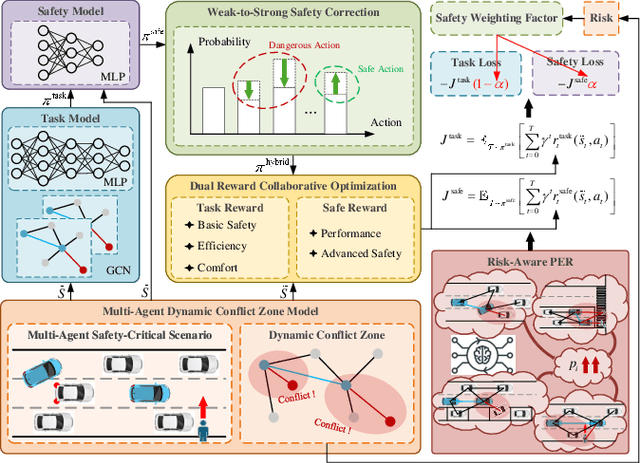
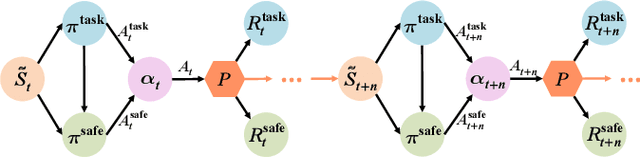
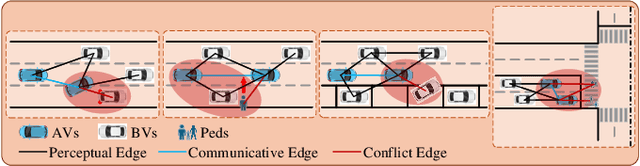
In multi-agent safety-critical scenarios, traditional autonomous driving frameworks face significant challenges in balancing safety constraints and task performance. These frameworks struggle to quantify dynamic interaction risks in real-time and depend heavily on manual rules, resulting in low computational efficiency and conservative strategies. To address these limitations, we propose a Dynamic Residual Safe Reinforcement Learning (DRS-RL) framework grounded in a safety-enhanced networked Markov decision process. It's the first time that the weak-to-strong theory is introduced into multi-agent decision-making, enabling lightweight dynamic calibration of safety boundaries via a weak-to-strong safety correction paradigm. Based on the multi-agent dynamic conflict zone model, our framework accurately captures spatiotemporal coupling risks among heterogeneous traffic participants and surpasses the static constraints of conventional geometric rules. Moreover, a risk-aware prioritized experience replay mechanism mitigates data distribution bias by mapping risk to sampling probability. Experimental results reveal that the proposed method significantly outperforms traditional RL algorithms in safety, efficiency, and comfort. Specifically, it reduces the collision rate by up to 92.17%, while the safety model accounts for merely 27% of the main model's parameters.