 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Surface Inspection via Operational Modal Analysis by a Swarm of Miniaturized Vibration-Sensing Robots
Jul 10, 2025Robot swarms offer the potential to serve a variety of distributed sensing applications. An interesting real-world application that stands to benefit significantly from deployment of swarms is structural monitoring, where traditional sensor networks face challenges in structural coverage due to their static nature. This paper investigates the deployment of a swarm of miniaturized vibration sensing robots to inspect and localize structural damages on a surface section within a high-fidelity simulation environment. In particular, we consider a 1 m x 1 m x 3 mm steel surface section and utilize finite element analysis using Abaqus to obtain realistic structural vibration data. The resulting vibration data is imported into the physics-based robotic simulator Webots, where we simulate the dynamics of our surface inspecting robot swarm. We employ (i) Gaussian process estimators to guide the robots' exploration as they collect vibration samples across the surface and (ii) operational modal analysis to detect structural damages by estimating and comparing existing and intact structural vibration patterns. We analyze the influence of exploration radii on estimation uncertainty and assess the effectiveness of our method across 10 randomized scenarios, where the number, locations, surface area, and depth of structural damages vary. Our simulation studies validate the efficacy of our miniaturized robot swarm for vibration-based structural inspection.
Simulation Assessment Guidelines towards Independent Safety Assurance of Autonomous Vehicles
Oct 02, 2023



This Simulation Assessment Guidelines document is a public guidelines document developed by the Centre of Excellence for Testing & Research of AVs - NTU (CETRAN) in collaboration with the Land Transport Authority (LTA) of Singapore. It is primarily intended to help the developers of Autonomous Vehicles (AVs) in Singapore to prepare their software simulations and provide recommendations that can ensure their readiness for independent assessment of their virtual simulation results according to the Milestone-testing framework adopted by the assessor and the local authority in Singapore, namely, CETRAN and LTA respectively.
White paper on Selected Environmental Parameters affecting Autonomous Vehicle (AV) Sensors
Sep 06, 2023



Autonomous Vehicles (AVs) being developed these days rely on various sensor technologies to sense and perceive the world around them. The sensor outputs are subsequently used by the Automated Driving System (ADS) onboard the vehicle to make decisions that affect its trajectory and how it interacts with the physical world. The main sensor technologies being utilized for sensing and perception (S&P) are LiDAR (Light Detection and Ranging), camera, RADAR (Radio Detection and Ranging), and ultrasound. Different environmental parameters would have different effects on the performance of each sensor, thereby affecting the S&P and decision-making (DM) of an AV. In this publication, we explore the effects of different environmental parameters on LiDARs and cameras, leading us to conduct a study to better understand the impact of several of these parameters on LiDAR performance. From the experiments undertaken, the goal is to identify some of the weaknesses and challenges that a LiDAR may face when an AV is using it. This informs AV regulators in Singapore of the effects of different environmental parameters on AV sensors so that they can determine testing standards and specifications which will assess the adequacy of LiDAR systems installed for local AV operations more robustly. Our approach adopts the LiDAR test methodology first developed in the Urban Mobility Grand Challenge (UMGC-L010) White Paper on LiDAR performance against selected Automotive Paints.
White paper on LiDAR performance against selected Automotive Paints
Sep 04, 2023



LiDAR (Light Detection and Ranging) is a useful sensing technique and an important source of data for autonomous vehicles (AVs). In this publication we present the results of a study undertaken to understand the impact of automotive paint on LiDAR performance along with a methodology used to conduct this study. Our approach consists of evaluating the average reflected intensity output by different LiDAR sensor models when tested with different types of automotive paints. The paints were chosen to represent common paints found on vehicles in Singapore. The experiments were conducted with LiDAR sensors commonly used by autonomous vehicle (AV) developers and OEMs. The paints used were also selected based on those observed in real-world conditions. This stems from a desire to model real-world performance of actual sensing systems when exposed to the physical world. The goal is then to inform regulators of AVs in Singapore of the impact of automotive paint on LiDAR performance, so that they can determine testing standards and specifications which will better reflect real-world performance and also better assess the adequacy of LiDAR systems installed for local AV operations. The tests were conducted for a combination of 13 different paint panels and 3 LiDAR sensors. In general, it was observed that darker coloured paints have lower reflection intensity whereas lighter coloured paints exhibited higher intensity values.
Safe Decision-making for Lane-change of Autonomous Vehicles via Human Demonstration-aided Reinforcement Learning
Jul 07, 2022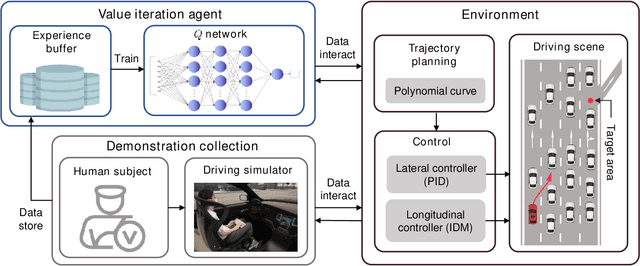
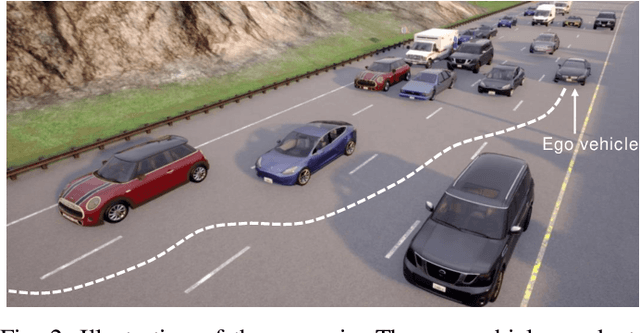
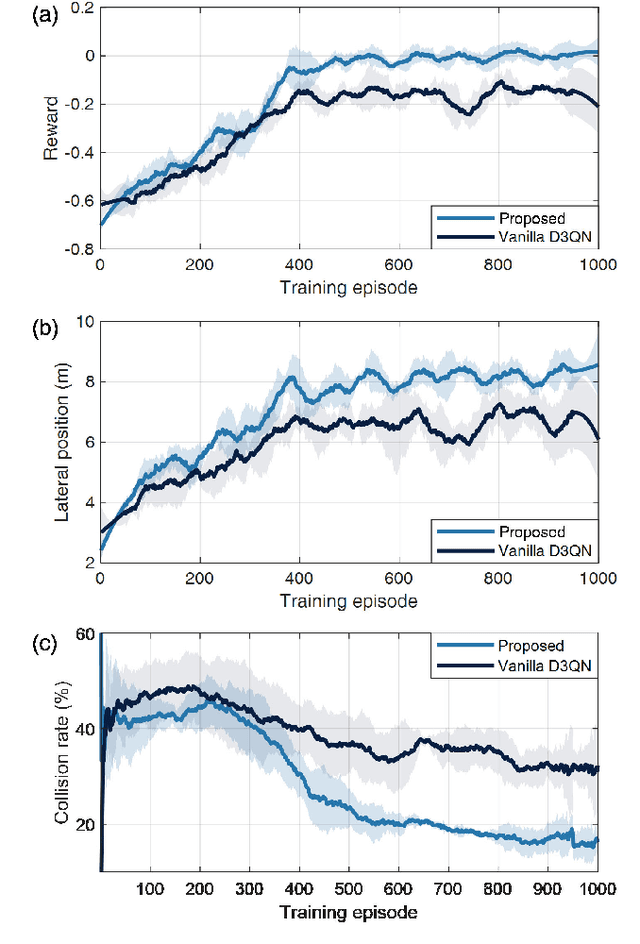
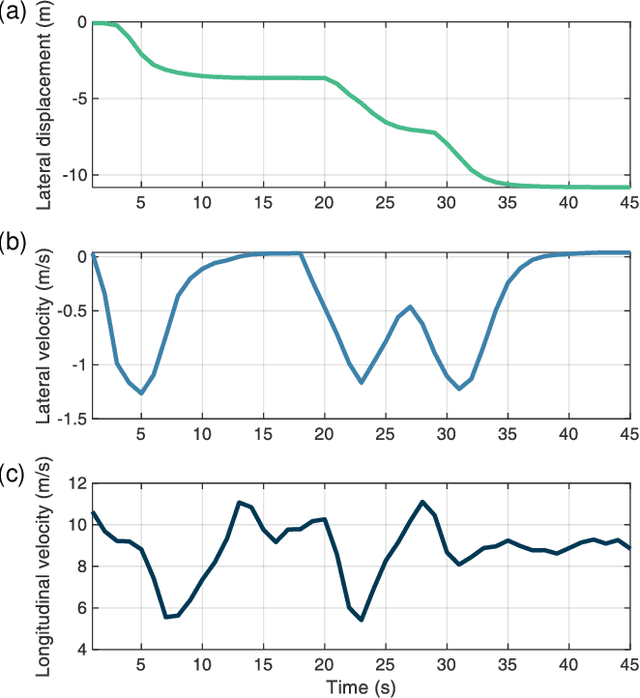
Decision-making is critical for lane change in autonomous driving. Reinforcement learning (RL) algorithms aim to identify the values of behaviors in various situations and thus they become a promising pathway to address the decision-making problem. However, poor runtime safety hinders RL-based decision-making strategies from complex driving tasks in practice. To address this problem, human demonstrations are incorporated into the RL-based decision-making strategy in this paper. Decisions made by human subjects in a driving simulator are treated as safe demonstrations, which are stored into the replay buffer and then utilized to enhance the training process of RL. A complex lane change task in an off-ramp scenario is established to examine the performance of the developed strategy. Simulation results suggest that human demonstrations can effectively improve the safety of decisions of RL. And the proposed strategy surpasses other existing learning-based decision-making strategies with respect to multiple driving performances.
Optimal Placement of Roadside Infrastructure Sensors towards Safer Autonomous Vehicle Deployments
Oct 04, 2021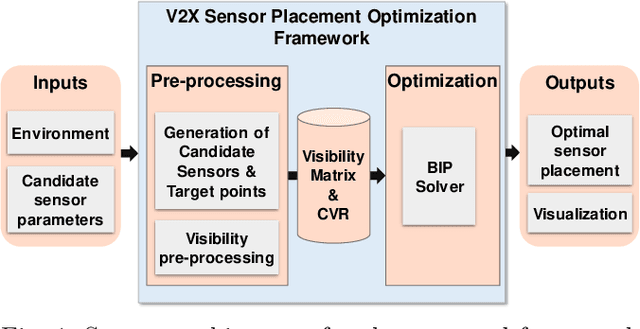
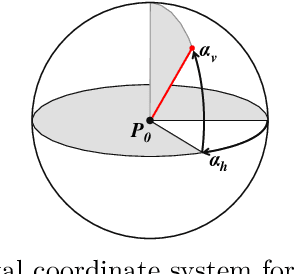

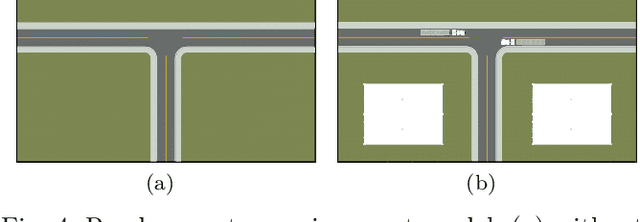
Vehicles with driving automation are increasingly being developed for deployment across the world. However, the onboard sensing and perception capabilities of such automated or autonomous vehicles (AV) may not be sufficient to ensure safety under all scenarios and contexts. Infrastructure-augmented environment perception using roadside infrastructure sensors can be considered as an effective solution, at least for selected regions of interest such as urban road intersections or curved roads that present occlusions to the AV. However, they incur significant costs for procurement, installation and maintenance. Therefore these sensors must be placed strategically and optimally to yield maximum benefits in terms of the overall safety of road users. In this paper, we propose a novel methodology towards obtaining an optimal placement of V2X (Vehicle-to-everything) infrastructure sensors, which is particularly attractive to urban AV deployments, with various considerations including costs, coverage and redundancy. We combine the latest advances made in raycasting and linear optimization literature to deliver a tool for urban city planners, traffic analysis and AV deployment operators. Through experimental evaluation in representative environments, we prove the benefits and practicality of our approach.