 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhite paper on Selected Environmental Parameters affecting Autonomous Vehicle (AV) Sensors
Sep 06, 2023



Autonomous Vehicles (AVs) being developed these days rely on various sensor technologies to sense and perceive the world around them. The sensor outputs are subsequently used by the Automated Driving System (ADS) onboard the vehicle to make decisions that affect its trajectory and how it interacts with the physical world. The main sensor technologies being utilized for sensing and perception (S&P) are LiDAR (Light Detection and Ranging), camera, RADAR (Radio Detection and Ranging), and ultrasound. Different environmental parameters would have different effects on the performance of each sensor, thereby affecting the S&P and decision-making (DM) of an AV. In this publication, we explore the effects of different environmental parameters on LiDARs and cameras, leading us to conduct a study to better understand the impact of several of these parameters on LiDAR performance. From the experiments undertaken, the goal is to identify some of the weaknesses and challenges that a LiDAR may face when an AV is using it. This informs AV regulators in Singapore of the effects of different environmental parameters on AV sensors so that they can determine testing standards and specifications which will assess the adequacy of LiDAR systems installed for local AV operations more robustly. Our approach adopts the LiDAR test methodology first developed in the Urban Mobility Grand Challenge (UMGC-L010) White Paper on LiDAR performance against selected Automotive Paints.
White paper on LiDAR performance against selected Automotive Paints
Sep 04, 2023



LiDAR (Light Detection and Ranging) is a useful sensing technique and an important source of data for autonomous vehicles (AVs). In this publication we present the results of a study undertaken to understand the impact of automotive paint on LiDAR performance along with a methodology used to conduct this study. Our approach consists of evaluating the average reflected intensity output by different LiDAR sensor models when tested with different types of automotive paints. The paints were chosen to represent common paints found on vehicles in Singapore. The experiments were conducted with LiDAR sensors commonly used by autonomous vehicle (AV) developers and OEMs. The paints used were also selected based on those observed in real-world conditions. This stems from a desire to model real-world performance of actual sensing systems when exposed to the physical world. The goal is then to inform regulators of AVs in Singapore of the impact of automotive paint on LiDAR performance, so that they can determine testing standards and specifications which will better reflect real-world performance and also better assess the adequacy of LiDAR systems installed for local AV operations. The tests were conducted for a combination of 13 different paint panels and 3 LiDAR sensors. In general, it was observed that darker coloured paints have lower reflection intensity whereas lighter coloured paints exhibited higher intensity values.
ViSTA: a Framework for Virtual Scenario-based Testing of Autonomous Vehicles
Sep 07, 2021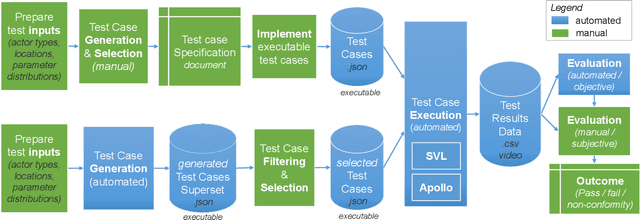
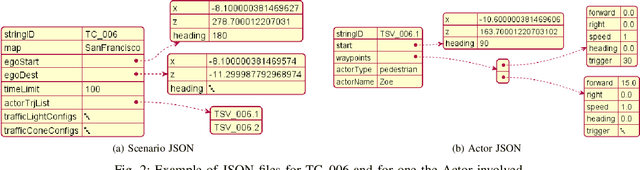
In this paper, we present ViSTA, a framework for Virtual Scenario-based Testing of Autonomous Vehicles (AV), developed as part of the 2021 IEEE Autonomous Test Driving AI Test Challenge. Scenario-based virtual testing aims to construct specific challenges posed for the AV to overcome, albeit in virtual test environments that may not necessarily resemble the real world. This approach is aimed at identifying specific issues that arise safety concerns before an actual deployment of the AV on the road. In this paper, we describe a comprehensive test case generation approach that facilitates the design of special-purpose scenarios with meaningful parameters to form test cases, both in automated and manual ways, leveraging the strength and weaknesses of either. Furthermore, we describe how to automate the execution of test cases, and analyze the performance of the AV under these test cases.