 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation Assessment Guidelines towards Independent Safety Assurance of Autonomous Vehicles
Oct 02, 2023



This Simulation Assessment Guidelines document is a public guidelines document developed by the Centre of Excellence for Testing & Research of AVs - NTU (CETRAN) in collaboration with the Land Transport Authority (LTA) of Singapore. It is primarily intended to help the developers of Autonomous Vehicles (AVs) in Singapore to prepare their software simulations and provide recommendations that can ensure their readiness for independent assessment of their virtual simulation results according to the Milestone-testing framework adopted by the assessor and the local authority in Singapore, namely, CETRAN and LTA respectively.
White paper on Selected Environmental Parameters affecting Autonomous Vehicle (AV) Sensors
Sep 06, 2023



Autonomous Vehicles (AVs) being developed these days rely on various sensor technologies to sense and perceive the world around them. The sensor outputs are subsequently used by the Automated Driving System (ADS) onboard the vehicle to make decisions that affect its trajectory and how it interacts with the physical world. The main sensor technologies being utilized for sensing and perception (S&P) are LiDAR (Light Detection and Ranging), camera, RADAR (Radio Detection and Ranging), and ultrasound. Different environmental parameters would have different effects on the performance of each sensor, thereby affecting the S&P and decision-making (DM) of an AV. In this publication, we explore the effects of different environmental parameters on LiDARs and cameras, leading us to conduct a study to better understand the impact of several of these parameters on LiDAR performance. From the experiments undertaken, the goal is to identify some of the weaknesses and challenges that a LiDAR may face when an AV is using it. This informs AV regulators in Singapore of the effects of different environmental parameters on AV sensors so that they can determine testing standards and specifications which will assess the adequacy of LiDAR systems installed for local AV operations more robustly. Our approach adopts the LiDAR test methodology first developed in the Urban Mobility Grand Challenge (UMGC-L010) White Paper on LiDAR performance against selected Automotive Paints.
On the Simulation of Perception Errors in Autonomous Vehicles
Feb 23, 2023



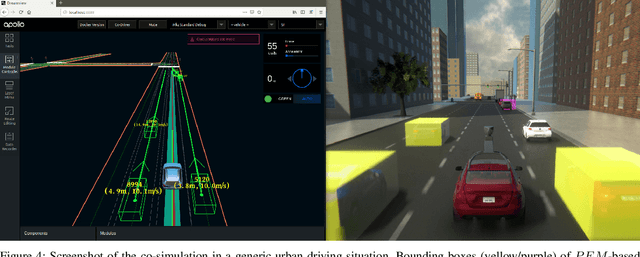
Even though virtual testing of Autonomous Vehicles (AVs) has been well recognized as essential for safety assessment, AV simulators are still undergoing active development. One particularly challenging question is to effectively include the Sensing and Perception (S&P) subsystem into the simulation loop. In this article, we define Perception Error Models (PEM), a virtual simulation component that can enable the analysis of the impact of perception errors on AV safety, without the need to model the sensors themselves. We propose a generalized data-driven procedure towards parametric modeling and evaluate it using Apollo, an open-source driving software, and nuScenes, a public AV dataset. Additionally, we implement PEMs in SVL, an open-source vehicle simulator. Furthermore, we demonstrate the usefulness of PEM-based virtual tests, by evaluating camera, LiDAR, and camera-LiDAR setups. Our virtual tests highlight limitations in the current evaluation metrics, and the proposed approach can help study the impact of perception errors on AV safety.
CoPEM: Cooperative Perception Error Models for Autonomous Driving
Nov 22, 2022



In this paper, we introduce the notion of Cooperative Perception Error Models (coPEMs) towards achieving an effective and efficient integration of V2X solutions within a virtual test environment. We focus our analysis on the occlusion problem in the (onboard) perception of Autonomous Vehicles (AV), which can manifest as misdetection errors on the occluded objects. Cooperative perception (CP) solutions based on Vehicle-to-Everything (V2X) communications aim to avoid such issues by cooperatively leveraging additional points of view for the world around the AV. This approach usually requires many sensors, mainly cameras and LiDARs, to be deployed simultaneously in the environment either as part of the road infrastructure or on other traffic vehicles. However, implementing a large number of sensor models in a virtual simulation pipeline is often prohibitively computationally expensive. Therefore, in this paper, we rely on extending Perception Error Models (PEMs) to efficiently implement such cooperative perception solutions along with the errors and uncertainties associated with them. We demonstrate the approach by comparing the safety achievable by an AV challenged with a traffic scenario where occlusion is the primary cause of a potential collision.
ViSTA: a Framework for Virtual Scenario-based Testing of Autonomous Vehicles
Sep 07, 2021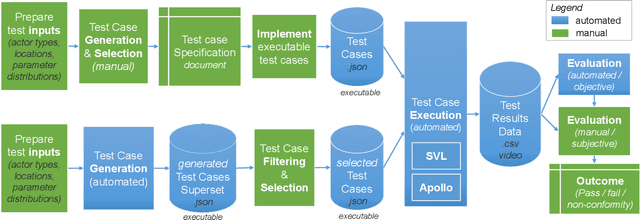
In this paper, we present ViSTA, a framework for Virtual Scenario-based Testing of Autonomous Vehicles (AV), developed as part of the 2021 IEEE Autonomous Test Driving AI Test Challenge. Scenario-based virtual testing aims to construct specific challenges posed for the AV to overcome, albeit in virtual test environments that may not necessarily resemble the real world. This approach is aimed at identifying specific issues that arise safety concerns before an actual deployment of the AV on the road. In this paper, we describe a comprehensive test case generation approach that facilitates the design of special-purpose scenarios with meaningful parameters to form test cases, both in automated and manual ways, leveraging the strength and weaknesses of either. Furthermore, we describe how to automate the execution of test cases, and analyze the performance of the AV under these test cases.
Vehicle Ego-Lane Estimation with Sensor Failure Modeling
Feb 06, 2020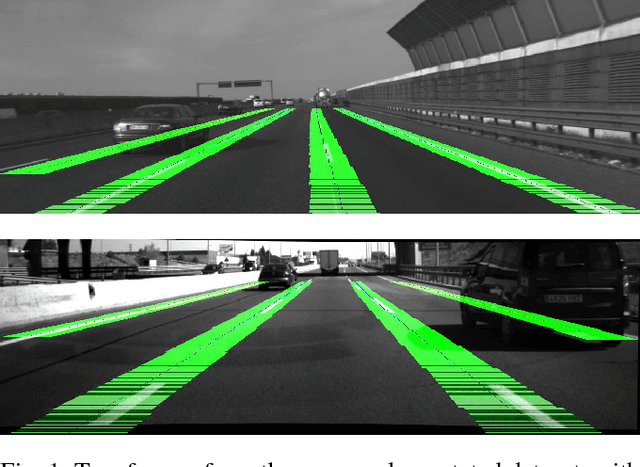
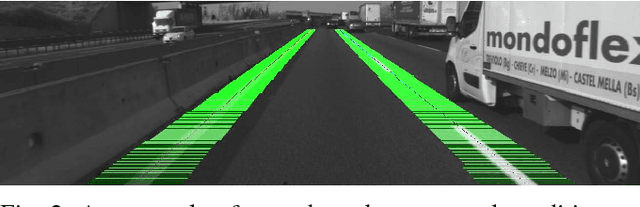
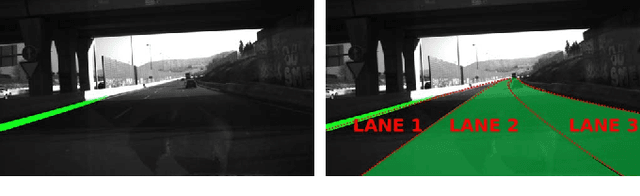
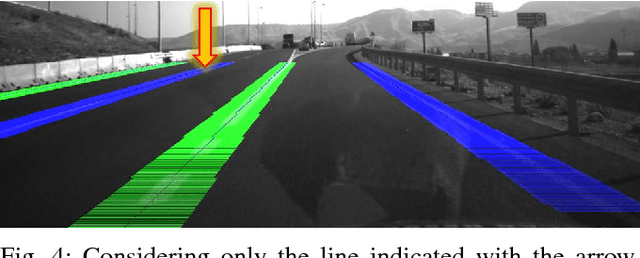
We present a probabilistic ego-lane estimation algorithm for highway-like scenarios that is designed to increase the accuracy of the ego-lane estimate, which can be obtained relying only on a noisy line detector and tracker. The contribution relies on a Hidden Markov Model (HMM) with a transient failure model. The proposed algorithm exploits the OpenStreetMap (or other cartographic services) road property lane number as the expected number of lanes and leverages consecutive, possibly incomplete, observations. The algorithm effectiveness is proven by employing different line detectors and showing we could achieve much more usable, i.e. stable and reliable, ego-lane estimates over more than 100 Km of highway scenarios, recorded both in Italy and Spain. Moreover, as we could not find a suitable dataset for a quantitative comparison with other approaches, we collected datasets and manually annotated the Ground Truth about the vehicle ego-lane. Such datasets are made publicly available for usage from the scientific community.
Modeling Sensing and Perception Errors towards Robust Decision Making in Autonomous Vehicles
Jan 31, 2020
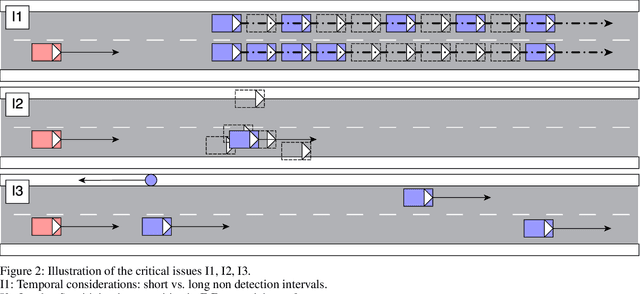

Sensing and Perception (S&P) is a crucial component of an autonomous system (such as a robot), especially when deployed in highly dynamic environments where it is required to react to unexpected situations. This is particularly true in case of Autonomous Vehicles (AVs) driving on public roads. However, the current evaluation metrics for perception algorithms are typically designed to measure their accuracy per se and do not account for their impact on the decision making subsystem(s). This limitation does not help developers and third party evaluators to answer a critical question: is the performance of a perception subsystem sufficient for the decision making subsystem to make robust, safe decisions? In this paper, we propose a simulation-based methodology towards answering this question. At the same time, we show how to analyze the impact of different kinds of sensing and perception errors on the behavior of the autonomous system.