 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Online Robot-Agnostic Traversability Estimation for Open-World Environments
May 27, 2026Self-supervised online traversability estimation enables robots to continuously learn from unlabeled open-world experiences and adapt their navigation behavior toward safe and efficient trajectories. Existing approaches either rely on handcrafted proprioceptive traversability scores, limiting robot-agnosticism, or cluster prior data, preventing online learning. Moreover, many continual learning methods incur substantial memory and computational costs, hindering onboard deployment. We introduce COTRATE, an online learning framework for continuous traversability estimation from multimodal, unlabeled robot experience. Our method first infers robust traversability scores using a robot-agnostic, learning-based online terrain assessment module operating on proprioceptiveand inertial signals. These scores then supervise a visual traversability network through a novel alignment loss that associates visual embeddings with online terrain assessments.To mitigate forgetting during continual learning with minimal overhead, we propose a diversity-aware feature selection strategythat preserves performance using a compact replay memory. We further show that the learned traversability representation supports knowledge transfer across different robot platforms with different locomotion kinematics. We evaluate COTRATE on a dataset of \approx 50,000 images collected with two robotic platforms across 11 outdoor terrains, and benchmark it on navigation tasks in three representative outdoor environments. We make the dataset, code, and trained models publicly available.
Joint Target-Less Intrinsic and Extrinsic Camera-LiDAR Calibration using Deep Point Correspondences
May 22, 2026Accurate camera-LiDAR calibration is a prerequisite for robust multi-modal perception in robotics. Recent target-less approaches based on deep point correspondences achieve remarkable performance for extrinsic calibration but assume rectified images with known intrinsics. In this work, we overcome this limitation and present the first fully target-less pipeline that jointly estimates camera intrinsics (pinhole model with radial-tangential distortion) and camera-LiDAR extrinsics with deep pixel-point correspondences. Our approach extends deep correspondence-based calibration by (i) automatic intrinsic initialization via structure-from-motion, (ii) generalizing camera-LiDAR matching to raw images with unknown intrinsics including distortion, and (iii) tightly coupling correspondence estimation with joint nonlinear optimization over both intrinsics and extrinsics. We evaluate our method on the KITTI dataset with unseen camera-LiDAR pairs and demonstrate that joint calibration achieves improved extrinsic accuracy while additionally recovering accurate intrinsics.
Latent Gaussian Splatting for 4D Panoptic Occupancy Tracking
Feb 26, 2026Capturing 4D spatiotemporal surroundings is crucial for the safe and reliable operation of robots in dynamic environments. However, most existing methods address only one side of the problem: they either provide coarse geometric tracking via bounding boxes, or detailed 3D structures like voxel-based occupancy that lack explicit temporal association. In this work, we present Latent Gaussian Splatting for 4D Panoptic Occupancy Tracking (LaGS) that advances spatiotemporal scene understanding in a holistic direction. Our approach incorporates camera-based end-to-end tracking with mask-based multi-view panoptic occupancy prediction, and addresses the key challenge of efficiently aggregating multi-view information into 3D voxel grids via a novel latent Gaussian splatting approach. Specifically, we first fuse observations into 3D Gaussians that serve as a sparse point-centric latent representation of the 3D scene, and then splat the aggregated features onto a 3D voxel grid that is decoded by a mask-based segmentation head. We evaluate LaGS on the Occ3D nuScenes and Waymo datasets, achieving state-of-the-art performance for 4D panoptic occupancy tracking. We make our code available at https://lags.cs.uni-freiburg.de/.
UP-Fuse: Uncertainty-guided LiDAR-Camera Fusion for 3D Panoptic Segmentation
Feb 22, 2026LiDAR-camera fusion enhances 3D panoptic segmentation by leveraging camera images to complement sparse LiDAR scans, but it also introduces a critical failure mode. Under adverse conditions, degradation or failure of the camera sensor can significantly compromise the reliability of the perception system. To address this problem, we introduce UP-Fuse, a novel uncertainty-aware fusion framework in the 2D range-view that remains robust under camera sensor degradation, calibration drift, and sensor failure. Raw LiDAR data is first projected into the range-view and encoded by a LiDAR encoder, while camera features are simultaneously extracted and projected into the same shared space. At its core, UP-Fuse employs an uncertainty-guided fusion module that dynamically modulates cross-modal interaction using predicted uncertainty maps. These maps are learned by quantifying representational divergence under diverse visual degradations, ensuring that only reliable visual cues influence the fused representation. The fused range-view features are decoded by a novel hybrid 2D-3D transformer that mitigates spatial ambiguities inherent to the 2D projection and directly predicts 3D panoptic segmentation masks. Extensive experiments on Panoptic nuScenes, SemanticKITTI, and our introduced Panoptic Waymo benchmark demonstrate the efficacy and robustness of UP-Fuse, which maintains strong performance even under severe visual corruption or misalignment, making it well suited for robotic perception in safety-critical settings.
Open-Set LiDAR Panoptic Segmentation Guided by Uncertainty-Aware Learning
Jun 16, 2025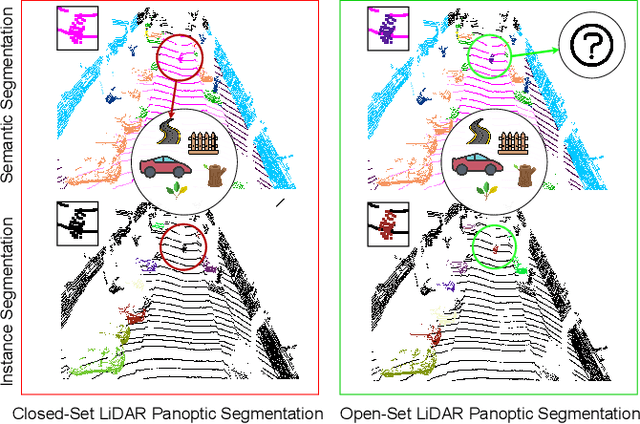
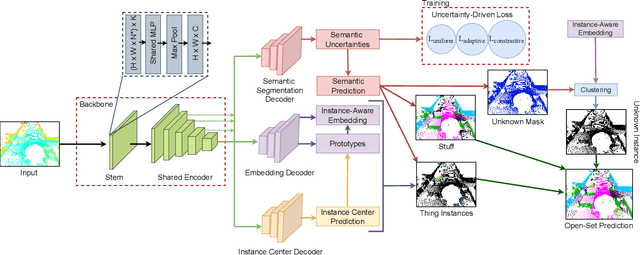
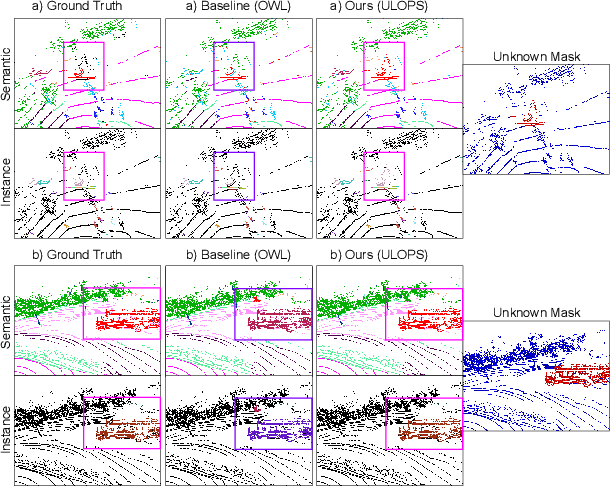
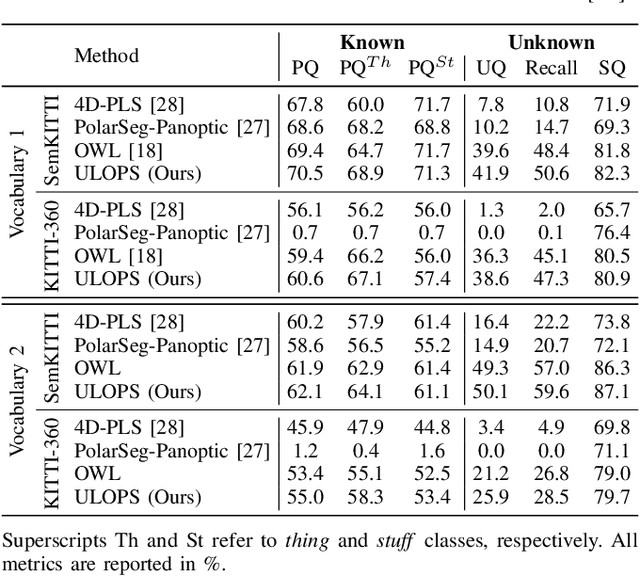
Autonomous vehicles that navigate in open-world environments may encounter previously unseen object classes. However, most existing LiDAR panoptic segmentation models rely on closed-set assumptions, failing to detect unknown object instances. In this work, we propose ULOPS, an uncertainty-guided open-set panoptic segmentation framework that leverages Dirichlet-based evidential learning to model predictive uncertainty. Our architecture incorporates separate decoders for semantic segmentation with uncertainty estimation, embedding with prototype association, and instance center prediction. During inference, we leverage uncertainty estimates to identify and segment unknown instances. To strengthen the model's ability to differentiate between known and unknown objects, we introduce three uncertainty-driven loss functions. Uniform Evidence Loss to encourage high uncertainty in unknown regions. Adaptive Uncertainty Separation Loss ensures a consistent difference in uncertainty estimates between known and unknown objects at a global scale. Contrastive Uncertainty Loss refines this separation at the fine-grained level. To evaluate open-set performance, we extend benchmark settings on KITTI-360 and introduce a new open-set evaluation for nuScenes. Extensive experiments demonstrate that ULOPS consistently outperforms existing open-set LiDAR panoptic segmentation methods.
Visual Loop Closure Detection Through Deep Graph Consensus
May 27, 2025Visual loop closure detection traditionally relies on place recognition methods to retrieve candidate loops that are validated using computationally expensive RANSAC-based geometric verification. As false positive loop closures significantly degrade downstream pose graph estimates, verifying a large number of candidates in online simultaneous localization and mapping scenarios is constrained by limited time and compute resources. While most deep loop closure detection approaches only operate on pairs of keyframes, we relax this constraint by considering neighborhoods of multiple keyframes when detecting loops. In this work, we introduce LoopGNN, a graph neural network architecture that estimates loop closure consensus by leveraging cliques of visually similar keyframes retrieved through place recognition. By propagating deep feature encodings among nodes of the clique, our method yields high-precision estimates while maintaining high recall. Extensive experimental evaluations on the TartanDrive 2.0 and NCLT datasets demonstrate that LoopGNN outperforms traditional baselines. Additionally, an ablation study across various keypoint extractors demonstrates that our method is robust, regardless of the type of deep feature encodings used, and exhibits higher computational efficiency compared to classical geometric verification baselines. We release our code, supplementary material, and keyframe data at https://loopgnn.cs.uni-freiburg.de.
Label-Efficient LiDAR Semantic Segmentation with 2D-3D Vision Transformer Adapters
Mar 05, 2025LiDAR semantic segmentation models are typically trained from random initialization as universal pre-training is hindered by the lack of large, diverse datasets. Moreover, most point cloud segmentation architectures incorporate custom network layers, limiting the transferability of advances from vision-based architectures. Inspired by recent advances in universal foundation models, we propose BALViT, a novel approach that leverages frozen vision models as amodal feature encoders for learning strong LiDAR encoders. Specifically, BALViT incorporates both range-view and bird's-eye-view LiDAR encoding mechanisms, which we combine through a novel 2D-3D adapter. While the range-view features are processed through a frozen image backbone, our bird's-eye-view branch enhances them through multiple cross-attention interactions. Thereby, we continuously improve the vision network with domain-dependent knowledge, resulting in a strong label-efficient LiDAR encoding mechanism. Extensive evaluations of BALViT on the SemanticKITTI and nuScenes benchmarks demonstrate that it outperforms state-of-the-art methods on small data regimes. We make the code and models publicly available at: http://balvit.cs.uni-freiburg.de.
Progressive Multi-Modal Fusion for Robust 3D Object Detection
Oct 09, 2024



Multi-sensor fusion is crucial for accurate 3D object detection in autonomous driving, with cameras and LiDAR being the most commonly used sensors. However, existing methods perform sensor fusion in a single view by projecting features from both modalities either in Bird's Eye View (BEV) or Perspective View (PV), thus sacrificing complementary information such as height or geometric proportions. To address this limitation, we propose ProFusion3D, a progressive fusion framework that combines features in both BEV and PV at both intermediate and object query levels. Our architecture hierarchically fuses local and global features, enhancing the robustness of 3D object detection. Additionally, we introduce a self-supervised mask modeling pre-training strategy to improve multi-modal representation learning and data efficiency through three novel objectives. Extensive experiments on nuScenes and Argoverse2 datasets conclusively demonstrate the efficacy of ProFusion3D. Moreover, ProFusion3D is robust to sensor failure, demonstrating strong performance when only one modality is available.
Taxonomy-Aware Continual Semantic Segmentation in Hyperbolic Spaces for Open-World Perception
Jul 25, 2024



Semantic segmentation models are typically trained on a fixed set of classes, limiting their applicability in open-world scenarios. Class-incremental semantic segmentation aims to update models with emerging new classes while preventing catastrophic forgetting of previously learned ones. However, existing methods impose strict rigidity on old classes, reducing their effectiveness in learning new incremental classes. In this work, we propose Taxonomy-Oriented Poincar\'e-regularized Incremental-Class Segmentation (TOPICS) that learns feature embeddings in hyperbolic space following explicit taxonomy-tree structures. This supervision provides plasticity for old classes, updating ancestors based on new classes while integrating new classes at fitting positions. Additionally, we maintain implicit class relational constraints on the geometric basis of the Poincar\'e ball. This ensures that the latent space can continuously adapt to new constraints while maintaining a robust structure to combat catastrophic forgetting. We also establish eight realistic incremental learning protocols for autonomous driving scenarios, where novel classes can originate from known classes or the background. Extensive evaluations of TOPICS on the Cityscapes and Mapillary Vistas 2.0 benchmarks demonstrate that it achieves state-of-the-art performance. We make the code and trained models publicly available at http://topics.cs.uni-freiburg.de.
Automatic Target-Less Camera-LiDAR Calibration From Motion and Deep Point Correspondences
Apr 26, 2024



Sensor setups of robotic platforms commonly include both camera and LiDAR as they provide complementary information. However, fusing these two modalities typically requires a highly accurate calibration between them. In this paper, we propose MDPCalib which is a novel method for camera-LiDAR calibration that requires neither human supervision nor any specific target objects. Instead, we utilize sensor motion estimates from visual and LiDAR odometry as well as deep learning-based 2D-pixel-to-3D-point correspondences that are obtained without in-domain retraining. We represent the camera-LiDAR calibration as a graph optimization problem and minimize the costs induced by constraints from sensor motion and point correspondences. In extensive experiments, we demonstrate that our approach yields highly accurate extrinsic calibration parameters and is robust to random initialization. Additionally, our approach generalizes to a wide range of sensor setups, which we demonstrate by employing it on various robotic platforms including a self-driving perception car, a quadruped robot, and a UAV. To make our calibration method publicly accessible, we release the code on our project website at http://calibration.cs.uni-freiburg.de.