 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSyn-Mediverse: A Multimodal Synthetic Dataset for Intelligent Scene Understanding of Healthcare Facilities
Aug 06, 2023



Safety and efficiency are paramount in healthcare facilities where the lives of patients are at stake. Despite the adoption of robots to assist medical staff in challenging tasks such as complex surgeries, human expertise is still indispensable. The next generation of autonomous healthcare robots hinges on their capacity to perceive and understand their complex and frenetic environments. While deep learning models are increasingly used for this purpose, they require extensive annotated training data which is impractical to obtain in real-world healthcare settings. To bridge this gap, we present Syn-Mediverse, the first hyper-realistic multimodal synthetic dataset of diverse healthcare facilities. Syn-Mediverse contains over \num{48000} images from a simulated industry-standard optical tracking camera and provides more than 1.5M annotations spanning five different scene understanding tasks including depth estimation, object detection, semantic segmentation, instance segmentation, and panoptic segmentation. We demonstrate the complexity of our dataset by evaluating the performance on a broad range of state-of-the-art baselines for each task. To further advance research on scene understanding of healthcare facilities, along with the public dataset we provide an online evaluation benchmark available at \url{http://syn-mediverse.cs.uni-freiburg.de}
PADLoC: LiDAR-Based Deep Loop Closure Detection and Registration using Panoptic Attention
Sep 20, 2022


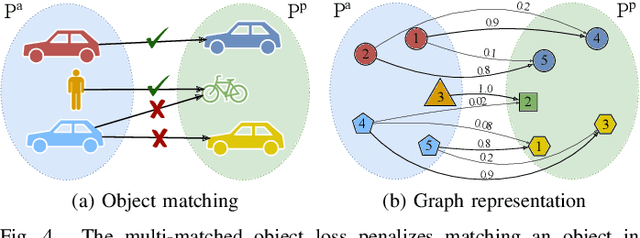
A key component of graph-based SLAM systems is the ability to detect loop closures in a trajectory to reduce the drift accumulated over time from the odometry. Most LiDAR-based methods achieve this goal by using only the geometric information, disregarding the semantics of the scene. In this work, we introduce PADLoC, a LiDAR-based loop closure detection and registration architecture comprising a shared 3D convolutional feature extraction backbone, a global descriptor head for loop closure detection, and a novel transformer-based head for point cloud matching and registration. We present multiple methods for estimating the point-wise matching confidence based on diversity indices. Additionally, to improve forward-backward consistency, we propose the use of two shared matching and registration heads with their source and target inputs swapped by exploiting that the estimated relative transformations must be inverse of each other. Furthermore, we leverage panoptic information during training in the form of a novel loss function that reframes the matching problem as a classification task in the case of the semantic labels and as a graph connectivity assignment for the instance labels. We perform extensive evaluations of PADLoC on multiple real-world datasets demonstrating that it achieves state-of-the-art performance. The code of our work is publicly available at http://padloc.cs.uni-freiburg.de.