 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-Set LiDAR Panoptic Segmentation Guided by Uncertainty-Aware Learning
Jun 16, 2025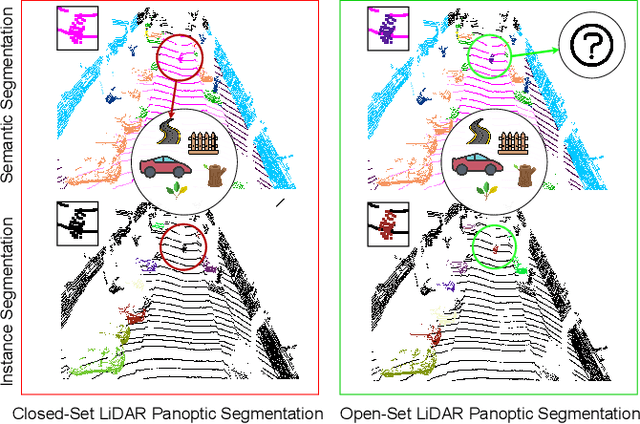
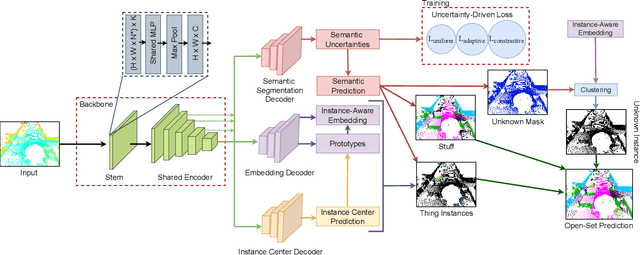
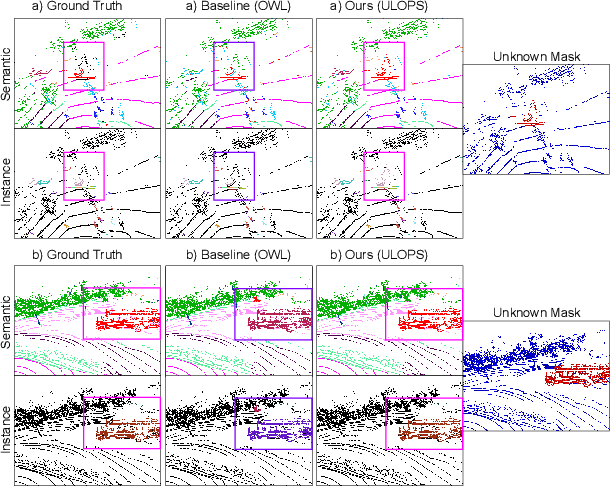
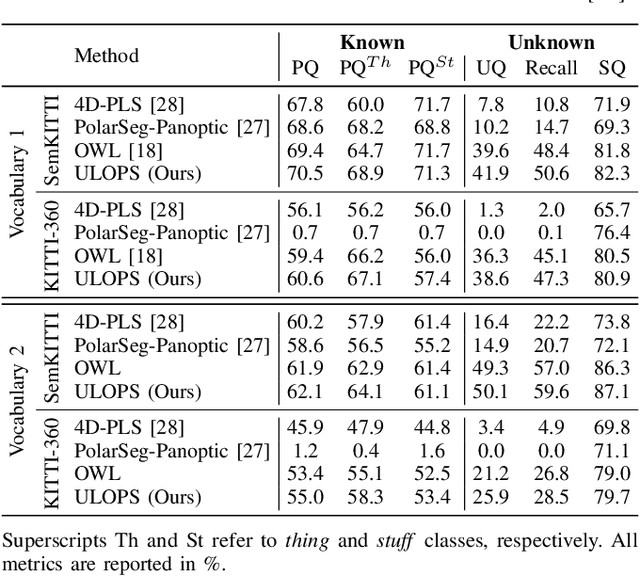
Autonomous vehicles that navigate in open-world environments may encounter previously unseen object classes. However, most existing LiDAR panoptic segmentation models rely on closed-set assumptions, failing to detect unknown object instances. In this work, we propose ULOPS, an uncertainty-guided open-set panoptic segmentation framework that leverages Dirichlet-based evidential learning to model predictive uncertainty. Our architecture incorporates separate decoders for semantic segmentation with uncertainty estimation, embedding with prototype association, and instance center prediction. During inference, we leverage uncertainty estimates to identify and segment unknown instances. To strengthen the model's ability to differentiate between known and unknown objects, we introduce three uncertainty-driven loss functions. Uniform Evidence Loss to encourage high uncertainty in unknown regions. Adaptive Uncertainty Separation Loss ensures a consistent difference in uncertainty estimates between known and unknown objects at a global scale. Contrastive Uncertainty Loss refines this separation at the fine-grained level. To evaluate open-set performance, we extend benchmark settings on KITTI-360 and introduce a new open-set evaluation for nuScenes. Extensive experiments demonstrate that ULOPS consistently outperforms existing open-set LiDAR panoptic segmentation methods.
Progressive Multi-Modal Fusion for Robust 3D Object Detection
Oct 09, 2024



Multi-sensor fusion is crucial for accurate 3D object detection in autonomous driving, with cameras and LiDAR being the most commonly used sensors. However, existing methods perform sensor fusion in a single view by projecting features from both modalities either in Bird's Eye View (BEV) or Perspective View (PV), thus sacrificing complementary information such as height or geometric proportions. To address this limitation, we propose ProFusion3D, a progressive fusion framework that combines features in both BEV and PV at both intermediate and object query levels. Our architecture hierarchically fuses local and global features, enhancing the robustness of 3D object detection. Additionally, we introduce a self-supervised mask modeling pre-training strategy to improve multi-modal representation learning and data efficiency through three novel objectives. Extensive experiments on nuScenes and Argoverse2 datasets conclusively demonstrate the efficacy of ProFusion3D. Moreover, ProFusion3D is robust to sensor failure, demonstrating strong performance when only one modality is available.
DeepFusion: A Robust and Modular 3D Object Detector for Lidars, Cameras and Radars
Sep 27, 2022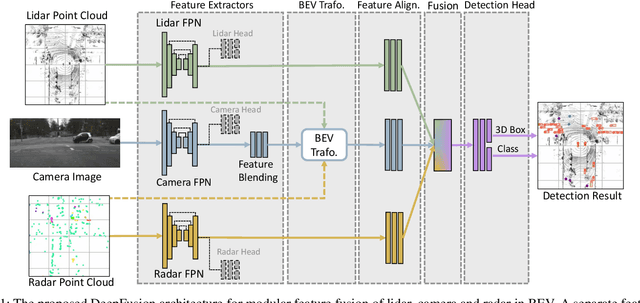
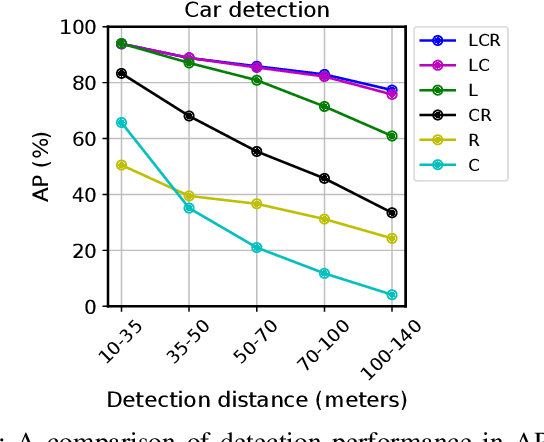
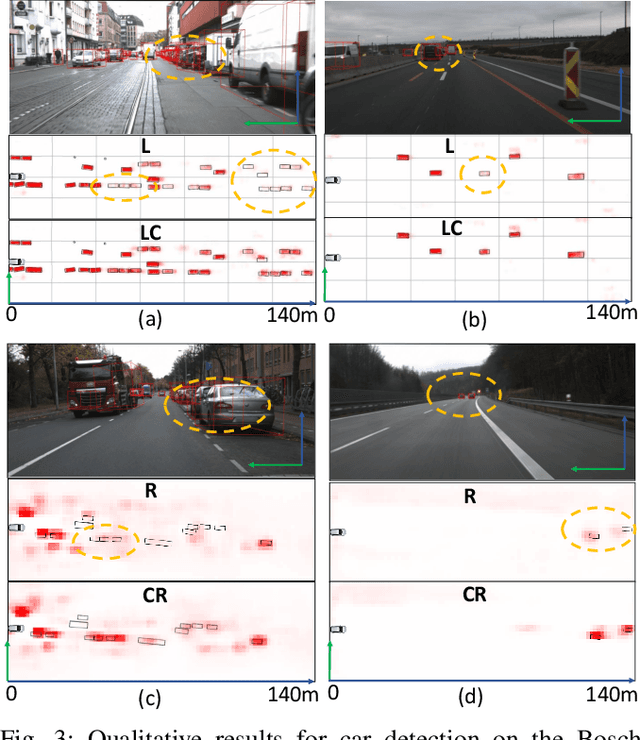
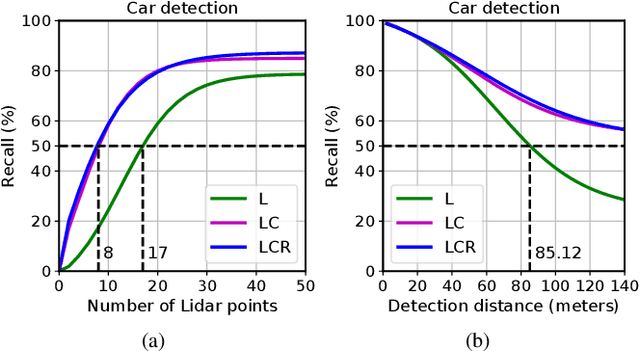
We propose DeepFusion, a modular multi-modal architecture to fuse lidars, cameras and radars in different combinations for 3D object detection. Specialized feature extractors take advantage of each modality and can be exchanged easily, making the approach simple and flexible. Extracted features are transformed into bird's-eye-view as a common representation for fusion. Spatial and semantic alignment is performed prior to fusing modalities in the feature space. Finally, a detection head exploits rich multi-modal features for improved 3D detection performance. Experimental results for lidar-camera, lidar-camera-radar and camera-radar fusion show the flexibility and effectiveness of our fusion approach. In the process, we study the largely unexplored task of faraway car detection up to 225 meters, showing the benefits of our lidar-camera fusion. Furthermore, we investigate the required density of lidar points for 3D object detection and illustrate implications at the example of robustness against adverse weather conditions. Moreover, ablation studies on our camera-radar fusion highlight the importance of accurate depth estimation.