 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation Assessment Guidelines towards Independent Safety Assurance of Autonomous Vehicles
Oct 02, 2023



This Simulation Assessment Guidelines document is a public guidelines document developed by the Centre of Excellence for Testing & Research of AVs - NTU (CETRAN) in collaboration with the Land Transport Authority (LTA) of Singapore. It is primarily intended to help the developers of Autonomous Vehicles (AVs) in Singapore to prepare their software simulations and provide recommendations that can ensure their readiness for independent assessment of their virtual simulation results according to the Milestone-testing framework adopted by the assessor and the local authority in Singapore, namely, CETRAN and LTA respectively.
Modeling Sensing and Perception Errors towards Robust Decision Making in Autonomous Vehicles
Jan 31, 2020
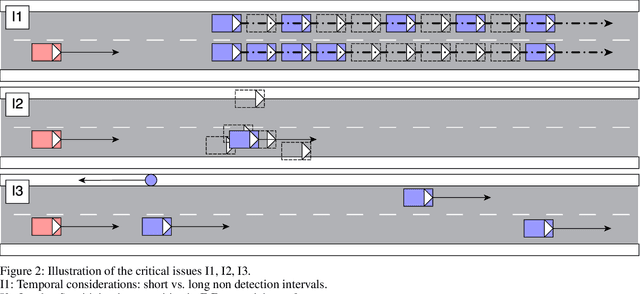

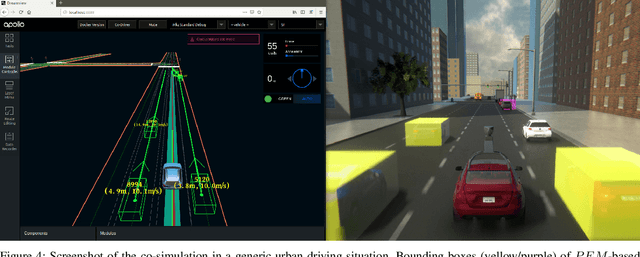
Sensing and Perception (S&P) is a crucial component of an autonomous system (such as a robot), especially when deployed in highly dynamic environments where it is required to react to unexpected situations. This is particularly true in case of Autonomous Vehicles (AVs) driving on public roads. However, the current evaluation metrics for perception algorithms are typically designed to measure their accuracy per se and do not account for their impact on the decision making subsystem(s). This limitation does not help developers and third party evaluators to answer a critical question: is the performance of a perception subsystem sufficient for the decision making subsystem to make robust, safe decisions? In this paper, we propose a simulation-based methodology towards answering this question. At the same time, we show how to analyze the impact of different kinds of sensing and perception errors on the behavior of the autonomous system.