 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation Assessment Guidelines towards Independent Safety Assurance of Autonomous Vehicles
Oct 02, 2023



This Simulation Assessment Guidelines document is a public guidelines document developed by the Centre of Excellence for Testing & Research of AVs - NTU (CETRAN) in collaboration with the Land Transport Authority (LTA) of Singapore. It is primarily intended to help the developers of Autonomous Vehicles (AVs) in Singapore to prepare their software simulations and provide recommendations that can ensure their readiness for independent assessment of their virtual simulation results according to the Milestone-testing framework adopted by the assessor and the local authority in Singapore, namely, CETRAN and LTA respectively.
ViSTA: a Framework for Virtual Scenario-based Testing of Autonomous Vehicles
Sep 07, 2021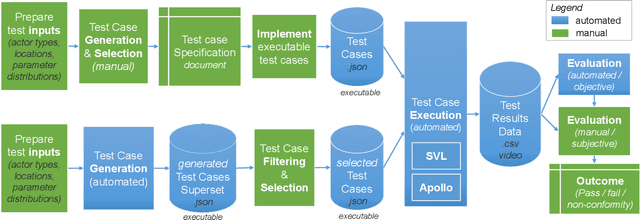
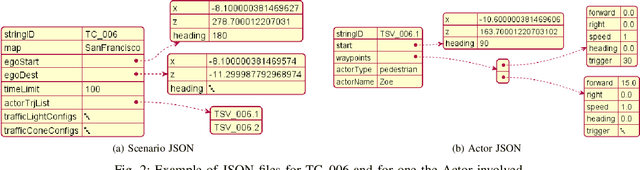
In this paper, we present ViSTA, a framework for Virtual Scenario-based Testing of Autonomous Vehicles (AV), developed as part of the 2021 IEEE Autonomous Test Driving AI Test Challenge. Scenario-based virtual testing aims to construct specific challenges posed for the AV to overcome, albeit in virtual test environments that may not necessarily resemble the real world. This approach is aimed at identifying specific issues that arise safety concerns before an actual deployment of the AV on the road. In this paper, we describe a comprehensive test case generation approach that facilitates the design of special-purpose scenarios with meaningful parameters to form test cases, both in automated and manual ways, leveraging the strength and weaknesses of either. Furthermore, we describe how to automate the execution of test cases, and analyze the performance of the AV under these test cases.