 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Placement of Roadside Infrastructure Sensors towards Safer Autonomous Vehicle Deployments
Oct 04, 2021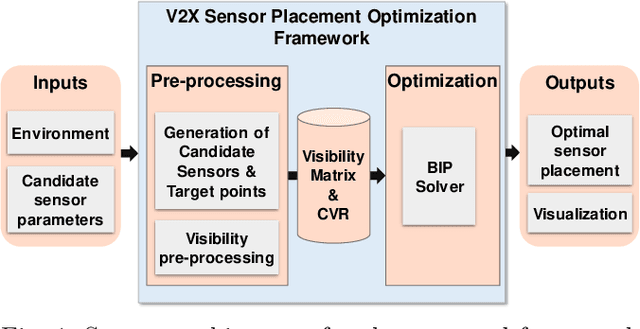

Vehicles with driving automation are increasingly being developed for deployment across the world. However, the onboard sensing and perception capabilities of such automated or autonomous vehicles (AV) may not be sufficient to ensure safety under all scenarios and contexts. Infrastructure-augmented environment perception using roadside infrastructure sensors can be considered as an effective solution, at least for selected regions of interest such as urban road intersections or curved roads that present occlusions to the AV. However, they incur significant costs for procurement, installation and maintenance. Therefore these sensors must be placed strategically and optimally to yield maximum benefits in terms of the overall safety of road users. In this paper, we propose a novel methodology towards obtaining an optimal placement of V2X (Vehicle-to-everything) infrastructure sensors, which is particularly attractive to urban AV deployments, with various considerations including costs, coverage and redundancy. We combine the latest advances made in raycasting and linear optimization literature to deliver a tool for urban city planners, traffic analysis and AV deployment operators. Through experimental evaluation in representative environments, we prove the benefits and practicality of our approach.