 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-in-the-Loop Deep Reinforcement Learning with Application to Autonomous Driving
Paper and Code
Apr 15, 2021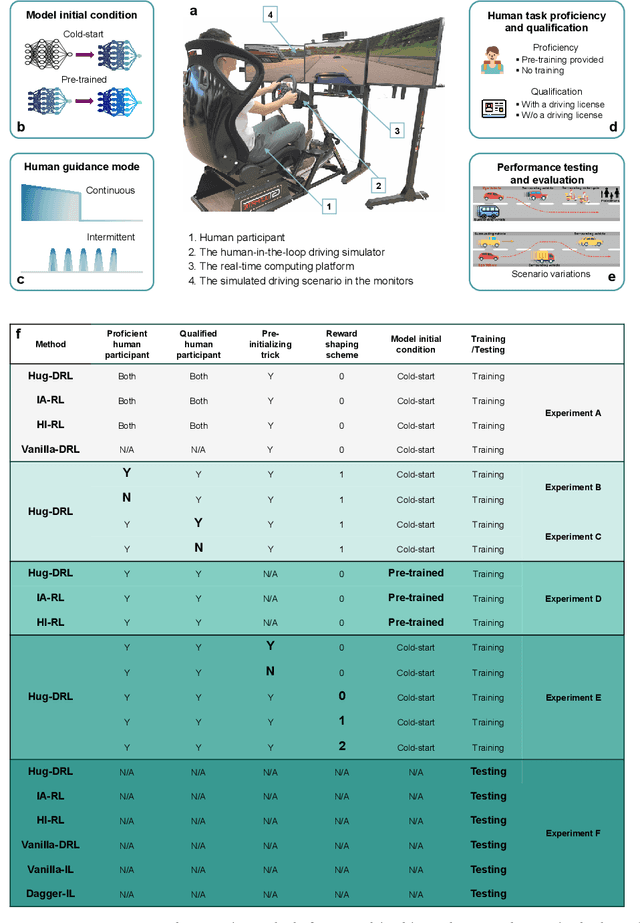
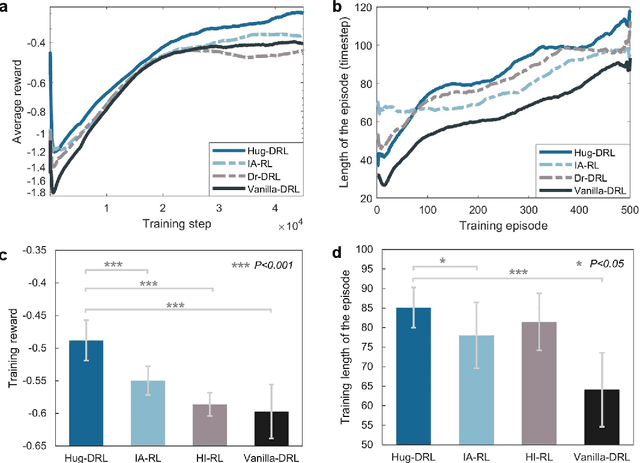
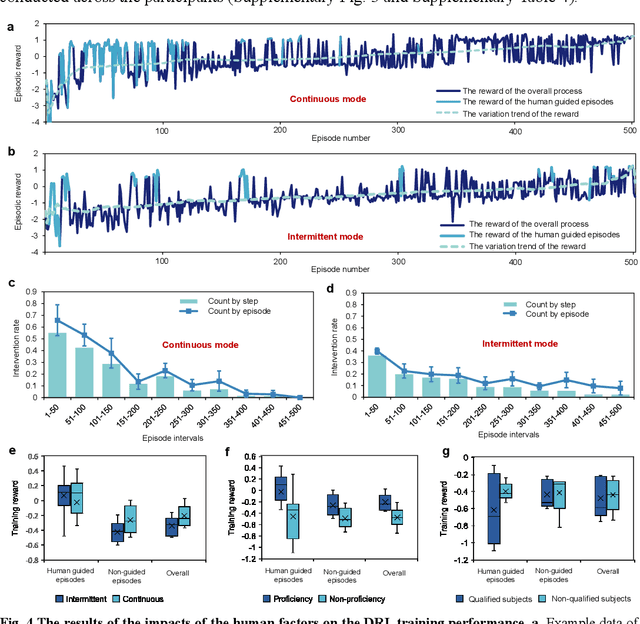

Due to the limited smartness and abilities of machine intelligence, currently autonomous vehicles are still unable to handle all kinds of situations and completely replace drivers. Because humans exhibit strong robustness and adaptability in complex driving scenarios, it is of great importance to introduce humans into the training loop of artificial intelligence, leveraging human intelligence to further advance machine learning algorithms. In this study, a real-time human-guidance-based deep reinforcement learning (Hug-DRL) method is developed for policy training of autonomous driving. Leveraging a newly designed control transfer mechanism between human and automation, human is able to intervene and correct the agent's unreasonable actions in real time when necessary during the model training process. Based on this human-in-the-loop guidance mechanism, an improved actor-critic architecture with modified policy and value networks is developed. The fast convergence of the proposed Hug-DRL allows real-time human guidance actions to be fused into the agent's training loop, further improving the efficiency and performance of deep reinforcement learning. The developed method is validated by human-in-the-loop experiments with 40 subjects and compared with other state-of-the-art learning approaches. The results suggest that the proposed method can effectively enhance the training efficiency and performance of the deep reinforcement learning algorithm under human guidance, without imposing specific requirements on participant expertise and experience.