 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Language Model based Interactive Decision-Making for Autonomous Driving
Apr 26, 2026In high-conflict mixed-traffic scenarios involving human-driven and autonomous vehicles, most existing autonomous driving systems default to overly conservative behaviors, lack proactive interaction, and consequently suffer from limited public acceptance. To mitigate intent misunderstandings and decision failures, we present a Large Language Model based interactive decision-making framework that augments scene understanding and intent-aware interaction to jointly improve safety and efficiency. The approach uses Object-Process Methodology to semantically model complex multi-vehicle scenes, abstracting low-level perceptual data into objects, processes, and relations, thereby streamlining reasoning over latent causal structure. Building on this representation, the Large Language Model parses both explicit and implicit intents of surrounding agents and, under jointly enforced safety and efficiency constraints, selects candidate maneuvers. We further generate perturbed trajectory candidates via Monte Carlo sampling and evaluate them to obtain an optimized executable trajectory. To foster transparency and coordination with nearby road users, the final decision is translated by the Large Language Model into concise natural-language messages and broadcast through an external Human-Machine Interface, completing a closed loop from scene understanding to action to language. Experiments in a cluster driving simulator demonstrate that the proposed method outperforms traditional baselines across safety, comfort, and efficiency metrics, while a Turing-test-style evaluation indicates a high degree of human-likeness in decision making. Besides, these results suggest that coupling semantic scene abstraction with Large Language Model mediated intent reasoning and language-based eHMI communication offers a practical pathway toward interactive, trustworthy autonomous driving in dense mixed traffic.
Toward Cooperative Driving in Mixed Traffic: An Adaptive Potential Game-Based Approach with Field Test Verification
Apr 22, 2026Connected autonomous vehicles (CAVs), which represent a significant advancement in autonomous driving technology, have the potential to greatly increase traffic safety and efficiency through cooperative decision-making. However, existing methods often overlook the individual needs and heterogeneity of cooperative participants, making it difficult to transfer them to environments where they coexist with human-driven vehicles (HDVs).To address this challenge, this paper proposes an adaptive potential game (APG) cooperative driving framework. First, the system utility function is established on the basis of a general form of individual utility and its monotonic relationship, allowing for the simultaneous optimization of both individual and system objectives. Second, the Shapley value is introduced to compute each vehicle's marginal utility within the system, allowing its varying impact to be quantified. Finally, the HDV preference estimation is dynamically refined by continuously comparing the observed HDV behavior with the APG's estimated actions, leading to improvements in overall system safety and efficiency. Ablation studies demonstrate that adaptively updating Shapley values and HDV preference estimation significantly improve cooperation success rates in mixed traffic. Comparative experiments further highlight the APG's advantages in terms of safety and efficiency over other cooperative methods. Moreover, the applicability of the approach to real-world scenarios was validated through field tests.
OVPD: A Virtual-Physical Fusion Testing Dataset of OnSite Auton-omous Driving Challenge
Apr 22, 2026The rapid iteration of autonomous driving algorithms has created a growing demand for high-fidelity, replayable, and diagnosable testing data. However, many public datasets lack real vehicle dynamics feedback and closed-loop interaction with surrounding traffic and road infrastructure, limiting their ability to reflect deployment readiness. To address this gap, we present OVPD (OnSite Virtual-Physical Dataset), a virtual-physical fusion testing dataset released from the 2025 OnSite Autonomous Driving Challenge. Centered on real-vehicle-in-the-loop testing, OVPD integrates virtual background traffic with vehicle-infrastructure perception to build controllable and interactive closed-loop test environments on a proving ground. The dataset contains 20 testing clips from 20 teams over a scenario chain of 15 atomic scenarios, totaling nearly 3 hours of multi-modal data, including vehicle trajectories and states, control commands, and digital-twin-rendered surround-view observations. OVPD supports long-tail planning and decision-making validation, open-loop or platform-enabled closed-loop evaluation, and comprehensive assessment across safety, efficiency, comfort, rule compliance, and traffic impact, providing actionable evidence for failure diagnosis and iterative improvement. The dataset is available via: https://huggingface.co/datasets/Yuhang253820/Onsite_OPVD
Evaluation as Evolution: Transforming Adversarial Diffusion into Closed-Loop Curricula for Autonomous Vehicles
Apr 08, 2026Autonomous vehicles in interactive traffic environments are often limited by the scarcity of safety-critical tail events in static datasets, which biases learned policies toward average-case behaviors and reduces robustness. Existing evaluation methods attempt to address this through adversarial stress testing, but are predominantly open-loop and post-hoc, making it difficult to incorporate discovered failures back into the training process. We introduce Evaluation as Evolution ($E^2$), a closed-loop framework that transforms adversarial generation from a static validation step into an adaptive evolutionary curriculum. Specifically, $E^2$ formulates adversarial scenario synthesis as transport-regularized sparse control over a learned reverse-time SDE prior. To make this high-dimensional generation tractable, we utilize topology-driven support selection to identify critical interacting agents, and introduce Topological Anchoring to stabilize the process. This approach enables the targeted discovery of failure cases while strictly constraining deviations from realistic data distributions. Empirically, $E^2$ improves collision failure discovery by 9.01% on the nuScenes dataset and up to 21.43% on the nuPlan dataset over the strongest baselines, while maintaining low invalidity and high realism. It further yields substantial robustness gains when the resulting boundary cases are recycled for closed-loop policy fine-tuning.
VP-AutoTest: A Virtual-Physical Fusion Autonomous Driving Testing Platform
Dec 08, 2025The rapid development of autonomous vehicles has led to a surge in testing demand. Traditional testing methods, such as virtual simulation, closed-course, and public road testing, face several challenges, including unrealistic vehicle states, limited testing capabilities, and high costs. These issues have prompted increasing interest in virtual-physical fusion testing. However, despite its potential, virtual-physical fusion testing still faces challenges, such as limited element types, narrow testing scope, and fixed evaluation metrics. To address these challenges, we propose the Virtual-Physical Testing Platform for Autonomous Vehicles (VP-AutoTest), which integrates over ten types of virtual and physical elements, including vehicles, pedestrians, and roadside infrastructure, to replicate the diversity of real-world traffic participants. The platform also supports both single-vehicle interaction and multi-vehicle cooperation testing, employing adversarial testing and parallel deduction to accelerate fault detection and explore algorithmic limits, while OBU and Redis communication enable seamless vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) cooperation across all levels of cooperative automation. Furthermore, VP-AutoTest incorporates a multidimensional evaluation framework and AI-driven expert systems to conduct comprehensive performance assessment and defect diagnosis. Finally, by comparing virtual-physical fusion test results with real-world experiments, the platform performs credibility self-evaluation to ensure both the fidelity and efficiency of autonomous driving testing. Please refer to the website for the full testing functionalities on the autonomous driving public service platform OnSite:https://www.onsite.com.cn.
CoReVLA: A Dual-Stage End-to-End Autonomous Driving Framework for Long-Tail Scenarios via Collect-and-Refine
Sep 19, 2025Autonomous Driving (AD) systems have made notable progress, but their performance in long-tail, safety-critical scenarios remains limited. These rare cases contribute a disproportionate number of accidents. Vision-Language Action (VLA) models have strong reasoning abilities and offer a potential solution, but their effectiveness is limited by the lack of high-quality data and inefficient learning in such conditions. To address these challenges, we propose CoReVLA, a continual learning end-to-end autonomous driving framework that improves the performance in long-tail scenarios through a dual-stage process of data Collection and behavior Refinement. First, the model is jointly fine-tuned on a mixture of open-source driving QA datasets, allowing it to acquire a foundational understanding of driving scenarios. Next, CoReVLA is deployed within the Cave Automatic Virtual Environment (CAVE) simulation platform, where driver takeover data is collected from real-time interactions. Each takeover indicates a long-tail scenario that CoReVLA fails to handle reliably. Finally, the model is refined via Direct Preference Optimization (DPO), allowing it to learn directly from human preferences and thereby avoid reward hacking caused by manually designed rewards. Extensive open-loop and closed-loop experiments demonstrate that the proposed CoReVLA model can accurately perceive driving scenarios and make appropriate decisions. On the Bench2Drive benchmark, CoReVLA achieves a Driving Score (DS) of 72.18 and a Success Rate (SR) of 50%, outperforming state-of-the-art methods by 7.96 DS and 15% SR under long-tail, safety-critical scenarios. Furthermore, case studies demonstrate the model's ability to continually improve its performance in similar failure-prone scenarios by leveraging past takeover experiences. All codea and preprocessed datasets are available at: https://github.com/FanGShiYuu/CoReVLA
A Knowledge-Driven Diffusion Policy for End-to-End Autonomous Driving Based on Expert Routing
Sep 05, 2025End-to-end autonomous driving remains constrained by the need to generate multi-modal actions, maintain temporal stability, and generalize across diverse scenarios. Existing methods often collapse multi-modality, struggle with long-horizon consistency, or lack modular adaptability. This paper presents KDP, a knowledge-driven diffusion policy that integrates generative diffusion modeling with a sparse mixture-of-experts routing mechanism. The diffusion component generates temporally coherent and multi-modal action sequences, while the expert routing mechanism activates specialized and reusable experts according to context, enabling modular knowledge composition. Extensive experiments across representative driving scenarios demonstrate that KDP achieves consistently higher success rates, reduced collision risk, and smoother control compared to prevailing paradigms. Ablation studies highlight the effectiveness of sparse expert activation and the Transformer backbone, and activation analyses reveal structured specialization and cross-scenario reuse of experts. These results establish diffusion with expert routing as a scalable and interpretable paradigm for knowledge-driven end-to-end autonomous driving.
Interactive Adversarial Testing of Autonomous Vehicles with Adjustable Confrontation Intensity
Jul 29, 2025Scientific testing techniques are essential for ensuring the safe operation of autonomous vehicles (AVs), with high-risk, highly interactive scenarios being a primary focus. To address the limitations of existing testing methods, such as their heavy reliance on high-quality test data, weak interaction capabilities, and low adversarial robustness, this paper proposes ExamPPO, an interactive adversarial testing framework that enables scenario-adaptive and intensity-controllable evaluation of autonomous vehicles. The framework models the Surrounding Vehicle (SV) as an intelligent examiner, equipped with a multi-head attention-enhanced policy network, enabling context-sensitive and sustained behavioral interventions. A scalar confrontation factor is introduced to modulate the intensity of adversarial behaviors, allowing continuous, fine-grained adjustment of test difficulty. Coupled with structured evaluation metrics, ExamPPO systematically probes AV's robustness across diverse scenarios and strategies. Extensive experiments across multiple scenarios and AV strategies demonstrate that ExamPPO can effectively modulate adversarial behavior, expose decision-making weaknesses in tested AVs, and generalize across heterogeneous environments, thereby offering a unified and reproducible solution for evaluating the safety and intelligence of autonomous decision-making systems.
Towards Human-Centric Autonomous Driving: A Fast-Slow Architecture Integrating Large Language Model Guidance with Reinforcement Learning
May 11, 2025Autonomous driving has made significant strides through data-driven techniques, achieving robust performance in standardized tasks. However, existing methods frequently overlook user-specific preferences, offering limited scope for interaction and adaptation with users. To address these challenges, we propose a "fast-slow" decision-making framework that integrates a Large Language Model (LLM) for high-level instruction parsing with a Reinforcement Learning (RL) agent for low-level real-time decision. In this dual system, the LLM operates as the "slow" module, translating user directives into structured guidance, while the RL agent functions as the "fast" module, making time-critical maneuvers under stringent latency constraints. By decoupling high-level decision making from rapid control, our framework enables personalized user-centric operation while maintaining robust safety margins. Experimental evaluations across various driving scenarios demonstrate the effectiveness of our method. Compared to baseline algorithms, the proposed architecture not only reduces collision rates but also aligns driving behaviors more closely with user preferences, thereby achieving a human-centric mode. By integrating user guidance at the decision level and refining it with real-time control, our framework bridges the gap between individual passenger needs and the rigor required for safe, reliable driving in complex traffic environments.
OnSiteVRU: A High-Resolution Trajectory Dataset for High-Density Vulnerable Road Users
Mar 30, 2025

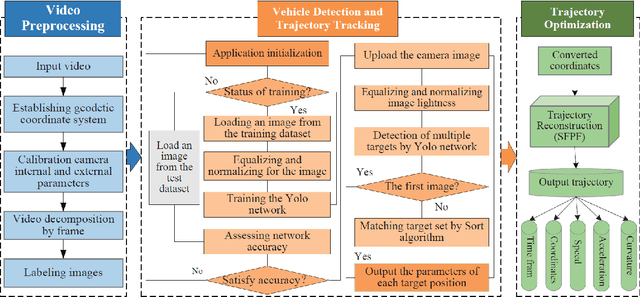

With the acceleration of urbanization and the growth of transportation demands, the safety of vulnerable road users (VRUs, such as pedestrians and cyclists) in mixed traffic flows has become increasingly prominent, necessitating high-precision and diverse trajectory data to support the development and optimization of autonomous driving systems. However, existing datasets fall short in capturing the diversity and dynamics of VRU behaviors, making it difficult to meet the research demands of complex traffic environments. To address this gap, this study developed the OnSiteVRU datasets, which cover a variety of scenarios, including intersections, road segments, and urban villages. These datasets provide trajectory data for motor vehicles, electric bicycles, and human-powered bicycles, totaling approximately 17,429 trajectories with a precision of 0.04 seconds. The datasets integrate both aerial-view natural driving data and onboard real-time dynamic detection data, along with environmental information such as traffic signals, obstacles, and real-time maps, enabling a comprehensive reconstruction of interaction events. The results demonstrate that VRU\_Data outperforms traditional datasets in terms of VRU density and scene coverage, offering a more comprehensive representation of VRU behavioral characteristics. This provides critical support for traffic flow modeling, trajectory prediction, and autonomous driving virtual testing. The dataset is publicly available for download at: https://www.kaggle.com/datasets/zcyan2/mixed-traffic-trajectory-dataset-in-from-shanghai.