 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Cooperative Driving in Mixed Traffic: An Adaptive Potential Game-Based Approach with Field Test Verification
Apr 22, 2026Connected autonomous vehicles (CAVs), which represent a significant advancement in autonomous driving technology, have the potential to greatly increase traffic safety and efficiency through cooperative decision-making. However, existing methods often overlook the individual needs and heterogeneity of cooperative participants, making it difficult to transfer them to environments where they coexist with human-driven vehicles (HDVs).To address this challenge, this paper proposes an adaptive potential game (APG) cooperative driving framework. First, the system utility function is established on the basis of a general form of individual utility and its monotonic relationship, allowing for the simultaneous optimization of both individual and system objectives. Second, the Shapley value is introduced to compute each vehicle's marginal utility within the system, allowing its varying impact to be quantified. Finally, the HDV preference estimation is dynamically refined by continuously comparing the observed HDV behavior with the APG's estimated actions, leading to improvements in overall system safety and efficiency. Ablation studies demonstrate that adaptively updating Shapley values and HDV preference estimation significantly improve cooperation success rates in mixed traffic. Comparative experiments further highlight the APG's advantages in terms of safety and efficiency over other cooperative methods. Moreover, the applicability of the approach to real-world scenarios was validated through field tests.
Escaping Stability-Plasticity Dilemma in Online Continual Learning for Motion Forecasting via Synergetic Memory Rehearsal
Aug 27, 2025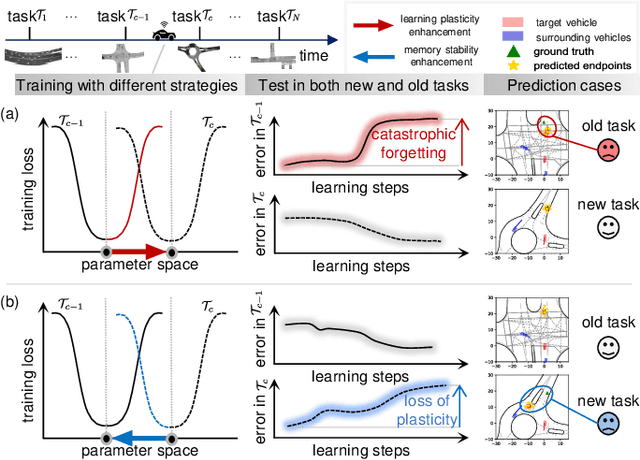
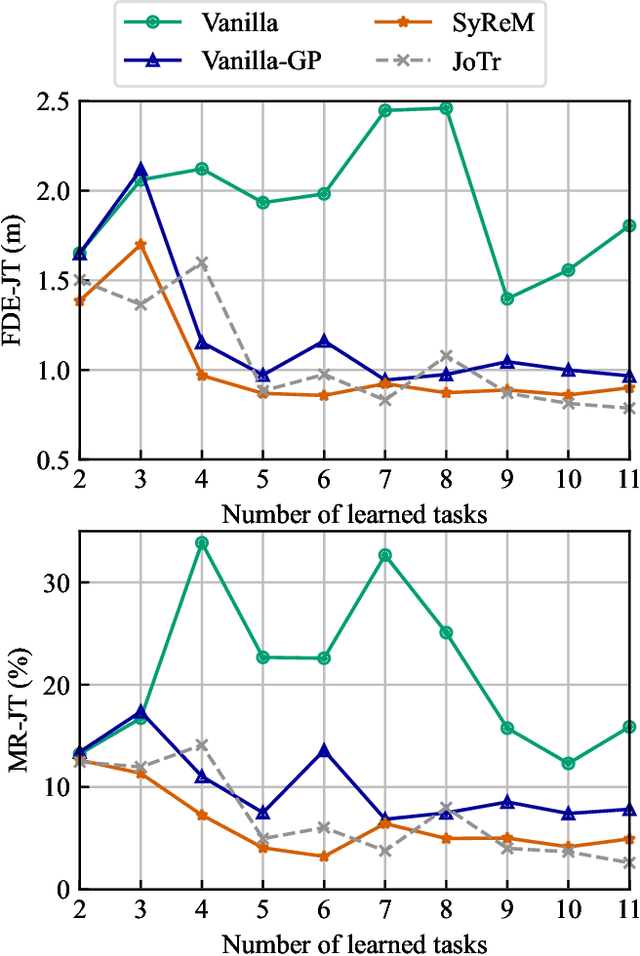
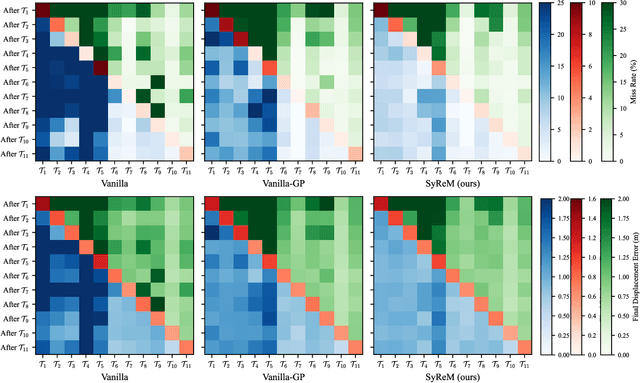
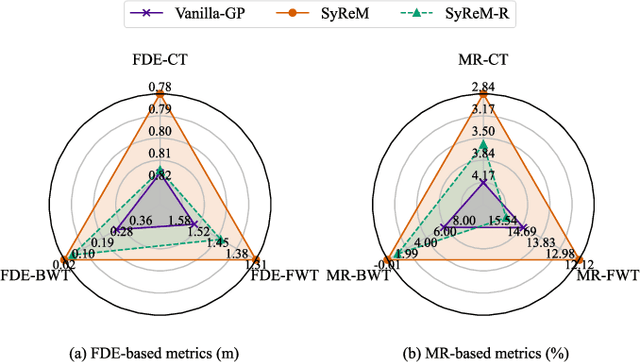
Deep neural networks (DNN) have achieved remarkable success in motion forecasting. However, most DNN-based methods suffer from catastrophic forgetting and fail to maintain their performance in previously learned scenarios after adapting to new data. Recent continual learning (CL) studies aim to mitigate this phenomenon by enhancing memory stability of DNN, i.e., the ability to retain learned knowledge. Yet, excessive emphasis on the memory stability often impairs learning plasticity, i.e., the capacity of DNN to acquire new information effectively. To address such stability-plasticity dilemma, this study proposes a novel CL method, synergetic memory rehearsal (SyReM), for DNN-based motion forecasting. SyReM maintains a compact memory buffer to represent learned knowledge. To ensure memory stability, it employs an inequality constraint that limits increments in the average loss over the memory buffer. Synergistically, a selective memory rehearsal mechanism is designed to enhance learning plasticity by selecting samples from the memory buffer that are most similar to recently observed data. This selection is based on an online-measured cosine similarity of loss gradients, ensuring targeted memory rehearsal. Since replayed samples originate from learned scenarios, this memory rehearsal mechanism avoids compromising memory stability. We validate SyReM under an online CL paradigm where training samples from diverse scenarios arrive as a one-pass stream. Experiments on 11 naturalistic driving datasets from INTERACTION demonstrate that, compared to non-CL and CL baselines, SyReM significantly mitigates catastrophic forgetting in past scenarios while improving forecasting accuracy in new ones. The implementation is publicly available at https://github.com/BIT-Jack/SyReM.
Complementary Learning System Empowers Online Continual Learning of Vehicle Motion Forecasting in Smart Cities
Aug 27, 2025



Artificial intelligence underpins most smart city services, yet deep neural network (DNN) that forecasts vehicle motion still struggle with catastrophic forgetting, the loss of earlier knowledge when models are updated. Conventional fixes enlarge the training set or replay past data, but these strategies incur high data collection costs, sample inefficiently and fail to balance long- and short-term experience, leaving them short of human-like continual learning. Here we introduce Dual-LS, a task-free, online continual learning paradigm for DNN-based motion forecasting that is inspired by the complementary learning system of the human brain. Dual-LS pairs two synergistic memory rehearsal replay mechanisms to accelerate experience retrieval while dynamically coordinating long-term and short-term knowledge representations. Tests on naturalistic data spanning three countries, over 772,000 vehicles and cumulative testing mileage of 11,187 km show that Dual-LS mitigates catastrophic forgetting by up to 74.31\% and reduces computational resource demand by up to 94.02\%, markedly boosting predictive stability in vehicle motion forecasting without inflating data requirements. Meanwhile, it endows DNN-based vehicle motion forecasting with computation efficient and human-like continual learning adaptability fit for smart cities.
InterHub: A Naturalistic Trajectory Dataset with Dense Interaction for Autonomous Driving
Nov 30, 2024



The driving interaction-a critical yet complex aspect of daily driving-lies at the core of autonomous driving research. However, real-world driving scenarios sparsely capture rich interaction events, limiting the availability of comprehensive trajectory datasets for this purpose. To address this challenge, we present InterHub, a dense interaction dataset derived by mining interaction events from extensive naturalistic driving records. We employ formal methods to describe and extract multi-agent interaction events, exposing the limitations of existing autonomous driving solutions. Additionally, we introduce a user-friendly toolkit enabling the expansion of InterHub with both public and private data. By unifying, categorizing, and analyzing diverse interaction events, InterHub facilitates cross-comparative studies and large-scale research, thereby advancing the evaluation and development of autonomous driving technologies.
Towards Interactive Autonomous Vehicle Testing: Vehicle-Under-Test-Centered Traffic Simulation
Jun 05, 2024The simulation-based testing is essential for safely implementing autonomous vehicles (AVs) on roads, necessitating simulated traffic environments that dynamically interact with the Vehicle Under Test (VUT). This study introduces a VUT-Centered environmental Dynamics Inference (VCDI) model for realistic, interactive, and diverse background traffic simulation. VCDI is built on a Transformer-based trajectory inference model to generate trajectories for background objects. Serving the purpose of AV testing, VCDI additionally considers VUT-centered interactivity and scenario diversity using a conditional inference framework. First, the VUT future motion is taken as an augmented model input to bridge the interaction between VUT and background objects. Second, to enrich the scenario diversity, a Bayesian-network-based cost function module is designed. The module, learned in a distributional form, captures the uncertainty of the VUT's strategy, triggering various scenario evolution. Experimental results validate VCDI's trajectory-level simulation precision which outperforms the state-of-the-art trajectory prediction work. The flexibility of the distributional cost function allows VCDI to provide diverse-yet-realistic scenarios for AV testing. We demonstrate such capability by modifying the anticipation to VUT's cost-based strategy and thus achieve multiple testing scenarios with explainable background traffic evolution.
DDM-Lag : A Diffusion-based Decision-making Model for Autonomous Vehicles with Lagrangian Safety Enhancement
Jan 08, 2024Decision-making stands as a pivotal component in the realm of autonomous vehicles (AVs), playing a crucial role in navigating the intricacies of autonomous driving. Amidst the evolving landscape of data-driven methodologies, enhancing decision-making performance in complex scenarios has emerged as a prominent research focus. Despite considerable advancements, current learning-based decision-making approaches exhibit potential for refinement, particularly in aspects of policy articulation and safety assurance. To address these challenges, we introduce DDM-Lag, a Diffusion Decision Model,augmented with Lagrangian-based safety enhancements.In our approach, the autonomous driving decision-making conundrum is conceptualized as a Constrained Markov Decision Process (CMDP). We have crafted an Actor-Critic framework, wherein the diffusion model is employed as the actor,facilitating policy exploration and learning. The integration of safety constraints in the CMDP and the adoption of a Lagrangian relaxation-based policy optimization technique ensure enhanced decision safety. A PID controller is employed for the stable updating of model parameters. The effectiveness of DDM-Lag is evaluated through different driving tasks, showcasing improvements in decision-making safety and overall performance compared to baselines.
Measuring Sociality in Driving Interaction
Jun 24, 2023


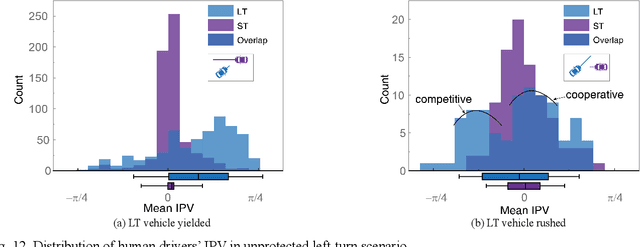
Interacting with other human road users is one of the most challenging tasks for autonomous vehicles. To generate congruent driving behaviors, the awareness and understanding of sociality, which includes implicit social customs and individualized social preferences of human drivers, are required. To understand and quantify the complex sociality in driving interactions, we propose a Virtual-Game-based Interaction Model (VGIM) that is explicitly parameterized by a social preference measurement, Interaction Preference Value (IPV), which is designed to capture the driver's relative preference for individual rewards over group rewards. A method for identifying IPV from observed driving trajectory is also provided. Then, we analyze human drivers' IPV with driving data recorded in a typical interactive driving scenario, the unprotected left turn. The results show that (1) human drivers express varied social preferences in executing different tasks (turning left or going straight); (2) competitive actions are strategically conducted by human drivers in order to coordinate with others. Finally, we implement the humanlike IPV expressing strategy with a rule-based method and embed it into VGIM and optimization-based motion planners. Controlled simulation experiments are conducted, and the results demonstrate that (1) IPV identification could improve the motion prediction performance in interactive driving scenarios and (2) dynamic IPV expressing strategy extracted from human driving data makes it possible to reproduce humanlike coordination patterns in the driving interaction.