 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeasuring Sociality in Driving Interaction
Paper and Code
Jun 24, 2023


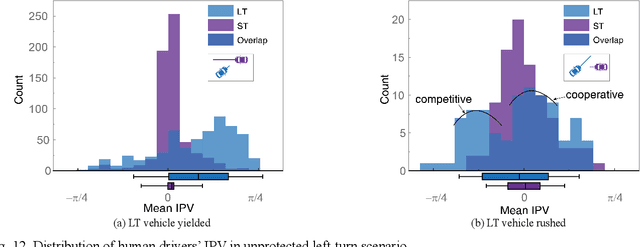
Interacting with other human road users is one of the most challenging tasks for autonomous vehicles. To generate congruent driving behaviors, the awareness and understanding of sociality, which includes implicit social customs and individualized social preferences of human drivers, are required. To understand and quantify the complex sociality in driving interactions, we propose a Virtual-Game-based Interaction Model (VGIM) that is explicitly parameterized by a social preference measurement, Interaction Preference Value (IPV), which is designed to capture the driver's relative preference for individual rewards over group rewards. A method for identifying IPV from observed driving trajectory is also provided. Then, we analyze human drivers' IPV with driving data recorded in a typical interactive driving scenario, the unprotected left turn. The results show that (1) human drivers express varied social preferences in executing different tasks (turning left or going straight); (2) competitive actions are strategically conducted by human drivers in order to coordinate with others. Finally, we implement the humanlike IPV expressing strategy with a rule-based method and embed it into VGIM and optimization-based motion planners. Controlled simulation experiments are conducted, and the results demonstrate that (1) IPV identification could improve the motion prediction performance in interactive driving scenarios and (2) dynamic IPV expressing strategy extracted from human driving data makes it possible to reproduce humanlike coordination patterns in the driving interaction.