 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVP-AutoTest: A Virtual-Physical Fusion Autonomous Driving Testing Platform
Dec 08, 2025The rapid development of autonomous vehicles has led to a surge in testing demand. Traditional testing methods, such as virtual simulation, closed-course, and public road testing, face several challenges, including unrealistic vehicle states, limited testing capabilities, and high costs. These issues have prompted increasing interest in virtual-physical fusion testing. However, despite its potential, virtual-physical fusion testing still faces challenges, such as limited element types, narrow testing scope, and fixed evaluation metrics. To address these challenges, we propose the Virtual-Physical Testing Platform for Autonomous Vehicles (VP-AutoTest), which integrates over ten types of virtual and physical elements, including vehicles, pedestrians, and roadside infrastructure, to replicate the diversity of real-world traffic participants. The platform also supports both single-vehicle interaction and multi-vehicle cooperation testing, employing adversarial testing and parallel deduction to accelerate fault detection and explore algorithmic limits, while OBU and Redis communication enable seamless vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) cooperation across all levels of cooperative automation. Furthermore, VP-AutoTest incorporates a multidimensional evaluation framework and AI-driven expert systems to conduct comprehensive performance assessment and defect diagnosis. Finally, by comparing virtual-physical fusion test results with real-world experiments, the platform performs credibility self-evaluation to ensure both the fidelity and efficiency of autonomous driving testing. Please refer to the website for the full testing functionalities on the autonomous driving public service platform OnSite:https://www.onsite.com.cn.
CoReVLA: A Dual-Stage End-to-End Autonomous Driving Framework for Long-Tail Scenarios via Collect-and-Refine
Sep 19, 2025Autonomous Driving (AD) systems have made notable progress, but their performance in long-tail, safety-critical scenarios remains limited. These rare cases contribute a disproportionate number of accidents. Vision-Language Action (VLA) models have strong reasoning abilities and offer a potential solution, but their effectiveness is limited by the lack of high-quality data and inefficient learning in such conditions. To address these challenges, we propose CoReVLA, a continual learning end-to-end autonomous driving framework that improves the performance in long-tail scenarios through a dual-stage process of data Collection and behavior Refinement. First, the model is jointly fine-tuned on a mixture of open-source driving QA datasets, allowing it to acquire a foundational understanding of driving scenarios. Next, CoReVLA is deployed within the Cave Automatic Virtual Environment (CAVE) simulation platform, where driver takeover data is collected from real-time interactions. Each takeover indicates a long-tail scenario that CoReVLA fails to handle reliably. Finally, the model is refined via Direct Preference Optimization (DPO), allowing it to learn directly from human preferences and thereby avoid reward hacking caused by manually designed rewards. Extensive open-loop and closed-loop experiments demonstrate that the proposed CoReVLA model can accurately perceive driving scenarios and make appropriate decisions. On the Bench2Drive benchmark, CoReVLA achieves a Driving Score (DS) of 72.18 and a Success Rate (SR) of 50%, outperforming state-of-the-art methods by 7.96 DS and 15% SR under long-tail, safety-critical scenarios. Furthermore, case studies demonstrate the model's ability to continually improve its performance in similar failure-prone scenarios by leveraging past takeover experiences. All codea and preprocessed datasets are available at: https://github.com/FanGShiYuu/CoReVLA
A Vehicle-Infrastructure Multi-layer Cooperative Decision-making Framework
Mar 19, 2025Autonomous driving has entered the testing phase, but due to the limited decision-making capabilities of individual vehicle algorithms, safety and efficiency issues have become more apparent in complex scenarios. With the advancement of connected communication technologies, autonomous vehicles equipped with connectivity can leverage vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications, offering a potential solution to the decision-making challenges from individual vehicle's perspective. We propose a multi-level vehicle-infrastructure cooperative decision-making framework for complex conflict scenarios at unsignalized intersections. First, based on vehicle states, we define a method for quantifying vehicle impacts and their propagation relationships, using accumulated impact to group vehicles through motif-based graph clustering. Next, within and between vehicle groups, a pass order negotiation process based on Large Language Models (LLM) is employed to determine the vehicle passage order, resulting in planned vehicle actions. Simulation results from ablation experiments show that our approach reduces negotiation complexity and ensures safer, more efficient vehicle passage at intersections, aligning with natural decision-making logic.
A Decision-Making GPT Model Augmented with Entropy Regularization for Autonomous Vehicles
Jun 20, 2024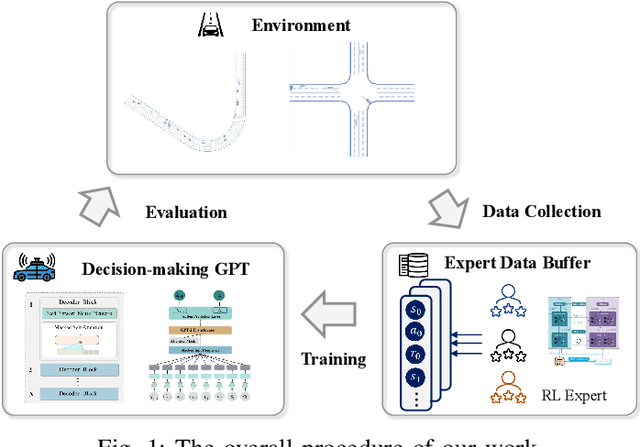

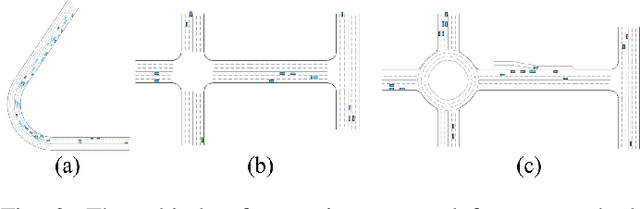

In the domain of autonomous vehicles (AVs), decision-making is a critical factor that significantly influences the efficacy of autonomous navigation. As the field progresses, the enhancement of decision-making capabilities in complex environments has become a central area of research within data-driven methodologies. Despite notable advances, existing learning-based decision-making strategies in autonomous vehicles continue to reveal opportunities for further refinement, particularly in the articulation of policies and the assurance of safety. In this study, the decision-making challenges associated with autonomous vehicles are conceptualized through the framework of the Constrained Markov Decision Process (CMDP) and approached as a sequence modeling problem. Utilizing the Generative Pre-trained Transformer (GPT), we introduce a novel decision-making model tailored for AVs, which incorporates entropy regularization techniques to bolster exploration and enhance safety performance. Comprehensive experiments conducted across various scenarios affirm that our approach surpasses several established baseline methods, particularly in terms of safety and overall efficacy.