 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Decision-Making GPT Model Augmented with Entropy Regularization for Autonomous Vehicles
Paper and Code
Jun 20, 2024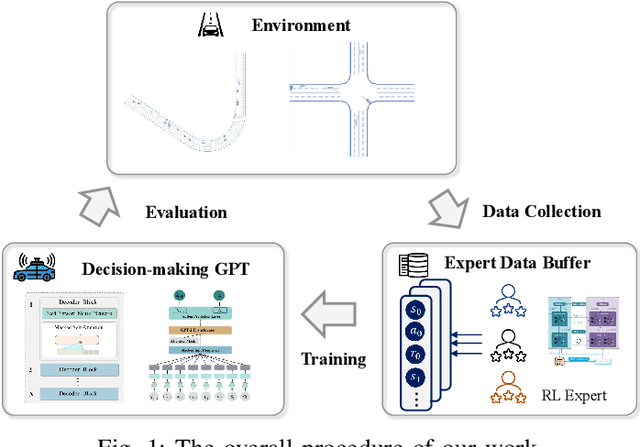

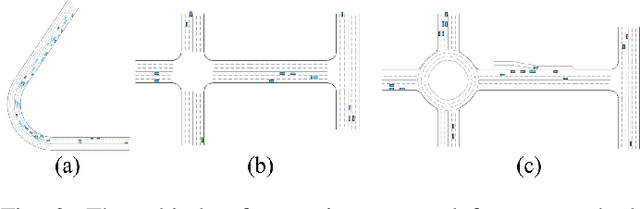

In the domain of autonomous vehicles (AVs), decision-making is a critical factor that significantly influences the efficacy of autonomous navigation. As the field progresses, the enhancement of decision-making capabilities in complex environments has become a central area of research within data-driven methodologies. Despite notable advances, existing learning-based decision-making strategies in autonomous vehicles continue to reveal opportunities for further refinement, particularly in the articulation of policies and the assurance of safety. In this study, the decision-making challenges associated with autonomous vehicles are conceptualized through the framework of the Constrained Markov Decision Process (CMDP) and approached as a sequence modeling problem. Utilizing the Generative Pre-trained Transformer (GPT), we introduce a novel decision-making model tailored for AVs, which incorporates entropy regularization techniques to bolster exploration and enhance safety performance. Comprehensive experiments conducted across various scenarios affirm that our approach surpasses several established baseline methods, particularly in terms of safety and overall efficacy.