 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAPPO-PIS: A Multi-Agent Proximal Policy Optimization Method with Prior Intent Sharing for CAVs' Cooperative Decision-Making
Paper and Code
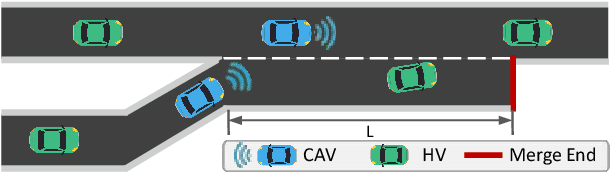
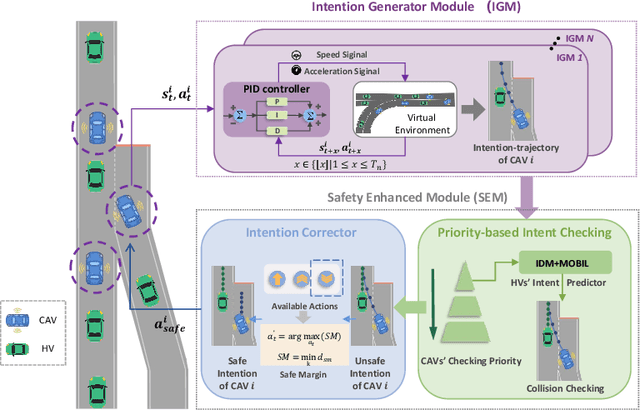
Vehicle-to-Vehicle (V2V) technologies have great potential for enhancing traffic flow efficiency and safety. However, cooperative decision-making in multi-agent systems, particularly in complex human-machine mixed merging areas, remains challenging for connected and autonomous vehicles (CAVs). Intent sharing, a key aspect of human coordination, may offer an effective solution to these decision-making problems, but its application in CAVs is under-explored. This paper presents an intent-sharing-based cooperative method, the Multi-Agent Proximal Policy Optimization with Prior Intent Sharing (MAPPO-PIS), which models the CAV cooperative decision-making problem as a Multi-Agent Reinforcement Learning (MARL) problem. It involves training and updating the agents' policies through the integration of two key modules: the Intention Generator Module (IGM) and the Safety Enhanced Module (SEM). The IGM is specifically crafted to generate and disseminate CAVs' intended trajectories spanning multiple future time-steps. On the other hand, the SEM serves a crucial role in assessing the safety of the decisions made and rectifying them if necessary. Merging area with human-machine mixed traffic flow is selected to validate our method. Results show that MAPPO-PIS significantly improves decision-making performance in multi-agent systems, surpassing state-of-the-art baselines in safety, efficiency, and overall traffic system performance. The code and video demo can be found at: \url{https://github.com/CCCC1dhcgd/A-MAPPO-PIS}.