 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUTF:Undertrained Tokens as Fingerprints A Novel Approach to LLM Identification
Oct 16, 2024



Fingerprinting large language models (LLMs) is essential for verifying model ownership, ensuring authenticity, and preventing misuse. Traditional fingerprinting methods often require significant computational overhead or white-box verification access. In this paper, we introduce UTF, a novel and efficient approach to fingerprinting LLMs by leveraging under-trained tokens. Under-trained tokens are tokens that the model has not fully learned during its training phase. By utilizing these tokens, we perform supervised fine-tuning to embed specific input-output pairs into the model. This process allows the LLM to produce predetermined outputs when presented with certain inputs, effectively embedding a unique fingerprint. Our method has minimal overhead and impact on model's performance, and does not require white-box access to target model's ownership identification. Compared to existing fingerprinting methods, UTF is also more effective and robust to fine-tuning and random guess.
An Integrated Framework of Decision Making and Motion Planning for Autonomous Vehicles Considering Social Behaviors
May 22, 2020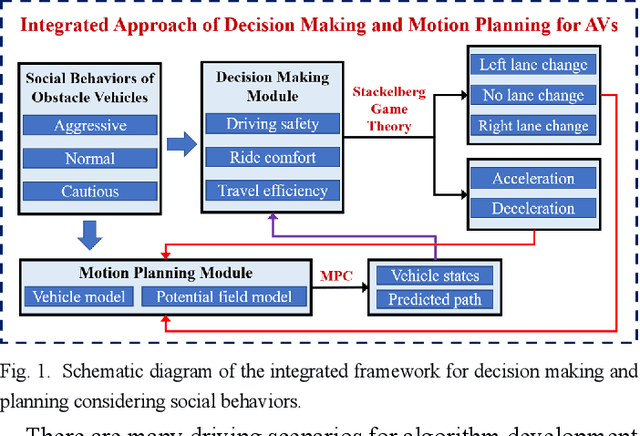
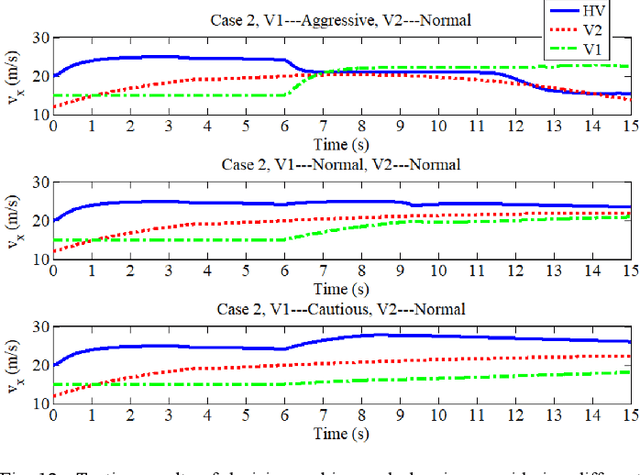
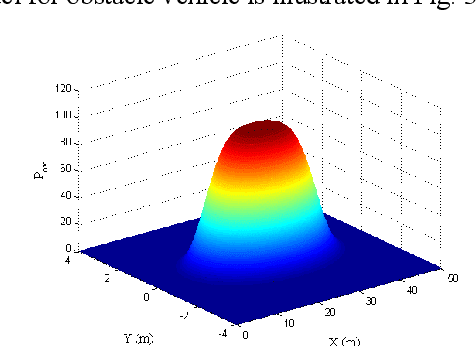
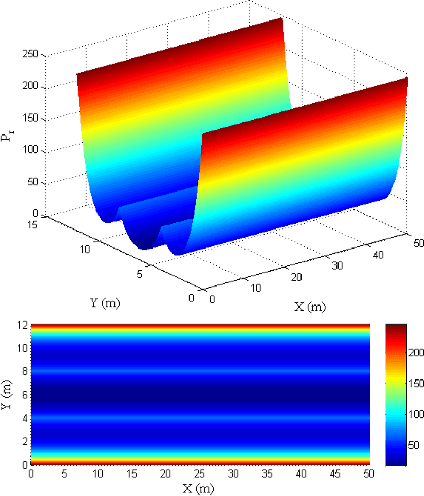
This paper presents a novel integrated approach to deal with the decision making and motion planning for lane-change maneuvers of autonomous vehicle (AV) considering social behaviors of surrounding traffic occupants. Reflected by driving styles and intentions of surrounding vehicles, the social behaviors are taken into consideration during the modelling process. Then, the Stackelberg Game theory is applied to solve the decision-making, which is formulated as a non-cooperative game problem. Besides, potential field is adopted in the motion planning model, which uses different potential functions to describe surrounding vehicles with different behaviors and road constrains. Then, Model Predictive Control (MPC) is utilized to predict the state and trajectory of the autonomous vehicle. Finally, the decision-making and motion planning is then integrated into a constrained multi-objective optimization problem. Three testing scenarios considering different social behaviors of surrounding vehicles are carried out to validate the performance of the proposed approach. Testing results show that the integrated approach is able to address different social interactions with other traffic participants, and make proper and safe decisions and planning for autonomous vehicles, demonstrating its feasibility and effectiveness.