 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Like Decision Making for Autonomous Driving: A Noncooperative Game Theoretic Approach
Paper and Code
May 22, 2020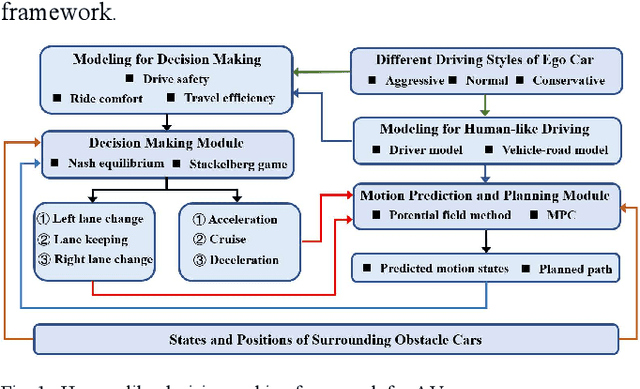
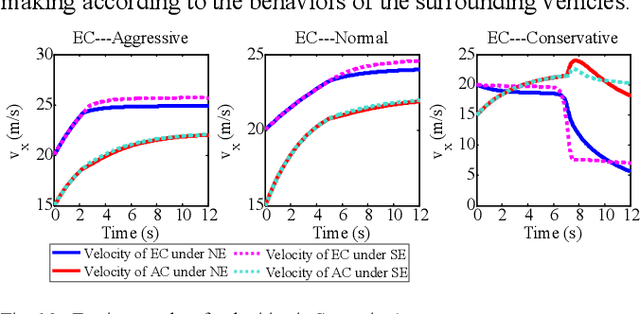
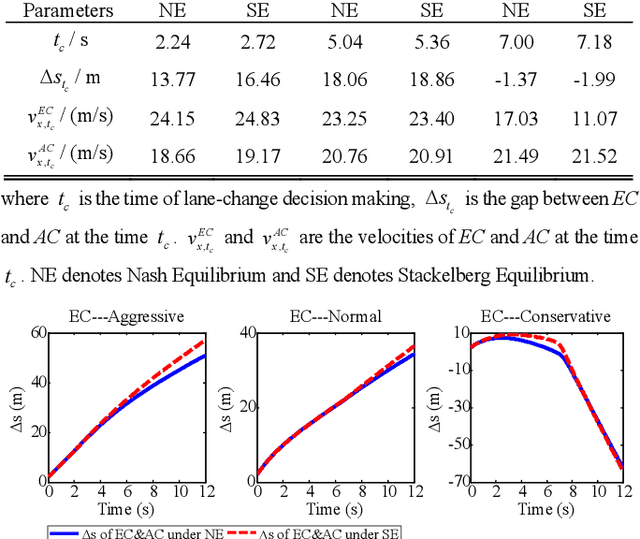
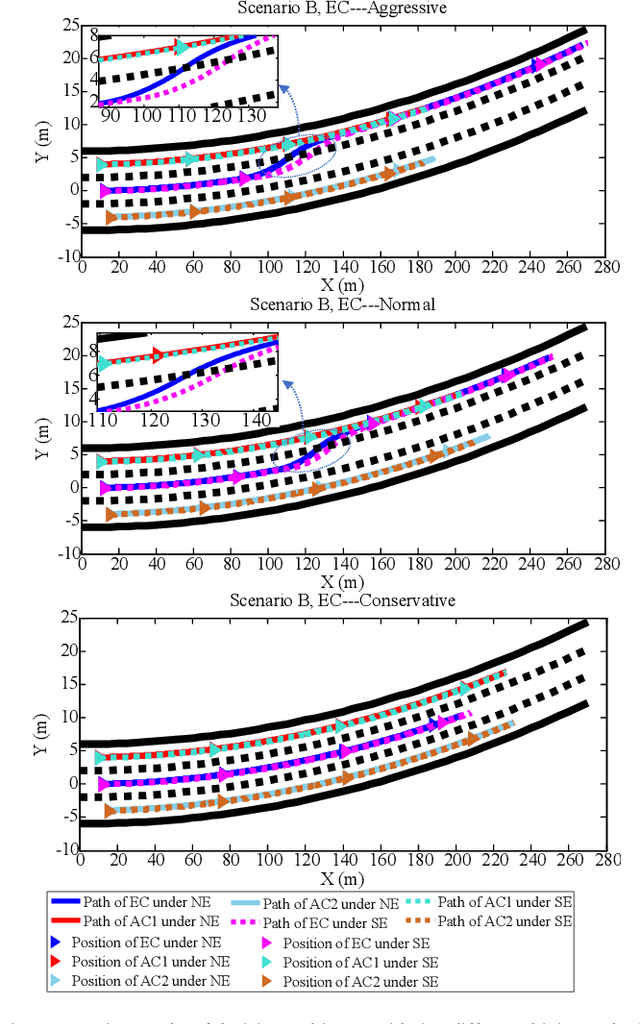
Considering that human-driven vehicles and autonomous vehicles (AVs) will coexist on roads in the future for a long time, how to merge AVs into human drivers traffic ecology and minimize the effect of AVs and their misfit with human drivers, are issues worthy of consideration. Moreover, different passengers have different needs for AVs, thus, how to provide personalized choices for different passengers is another issue for AVs. Therefore, a human-like decision making framework is designed for AVs in this paper. Different driving styles and social interaction characteristics are formulated for AVs regarding drive safety, ride comfort and travel efficiency, which are considered in the modelling process of decision making. Then, Nash equilibrium and Stackelberg game theory are applied to the noncooperative decision making. In addition, potential field method and model predictive control (MPC) are combined to deal with the motion prediction and planning for AVs, which provides predicted motion information for the decision-making module. Finally, two typical testing scenarios of lane change, i.e., merging and overtaking, are carried out to evaluate the feasibility and effectiveness of the proposed decision-making framework considering different human-like behaviors. Testing results indicate that this human-like decision making framework can make personalized decisions according to different driving styles.