 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimWorld: A Unified Benchmark for Simulator-Conditioned Scene Generation via World Model
Mar 18, 2025


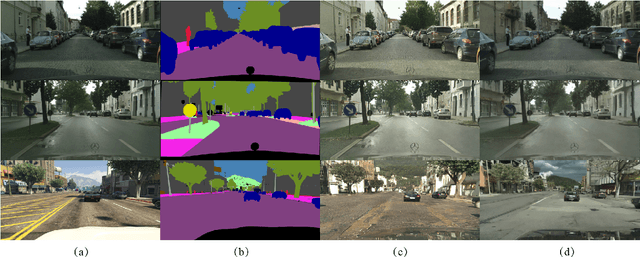
With the rapid advancement of autonomous driving technology, a lack of data has become a major obstacle to enhancing perception model accuracy. Researchers are now exploring controllable data generation using world models to diversify datasets. However, previous work has been limited to studying image generation quality on specific public datasets. There is still relatively little research on how to build data generation engines for real-world application scenes to achieve large-scale data generation for challenging scenes. In this paper, a simulator-conditioned scene generation engine based on world model is proposed. By constructing a simulation system consistent with real-world scenes, simulation data and labels, which serve as the conditions for data generation in the world model, for any scenes can be collected. It is a novel data generation pipeline by combining the powerful scene simulation capabilities of the simulation engine with the robust data generation capabilities of the world model. In addition, a benchmark with proportionally constructed virtual and real data, is provided for exploring the capabilities of world models in real-world scenes. Quantitative results show that these generated images significantly improve downstream perception models performance. Finally, we explored the generative performance of the world model in urban autonomous driving scenarios. All the data and code will be available at https://github.com/Li-Zn-H/SimWorld.
FusionPlanner: A Multi-task Motion Planner for Mining Trucks using Multi-sensor Fusion Method
Aug 14, 2023In recent years, significant achievements have been made in motion planning for intelligent vehicles. However, as a typical unstructured environment, open-pit mining attracts limited attention due to its complex operational conditions and adverse environmental factors. A comprehensive paradigm for unmanned transportation in open-pit mines is proposed in this research, including a simulation platform, a testing benchmark, and a trustworthy and robust motion planner. \textcolor{red}{Firstly, we propose a multi-task motion planning algorithm, called FusionPlanner, for autonomous mining trucks by the Multi-sensor fusion method to adapt both lateral and longitudinal control tasks for unmanned transportation. Then, we develop a novel benchmark called MiningNav, which offers three validation approaches to evaluate the trustworthiness and robustness of well-trained algorithms in transportation roads of open-pit mines. Finally, we introduce the Parallel Mining Simulator (PMS), a new high-fidelity simulator specifically designed for open-pit mining scenarios. PMS enables the users to manage and control open-pit mine transportation from both the single-truck control and multi-truck scheduling perspectives.} \textcolor{red}{The performance of FusionPlanner is tested by MiningNav in PMS, and the empirical results demonstrate a significant reduction in the number of collisions and takeovers of our planner. We anticipate our unmanned transportation paradigm will bring mining trucks one step closer to trustworthiness and robustness in continuous round-the-clock unmanned transportation.
Motion Planning for Autonomous Driving: The State of the Art and Future Perspectives
Mar 29, 2023



Thanks to the augmented convenience, safety advantages, and potential commercial value, Intelligent vehicles (IVs) have attracted wide attention throughout the world. Although a few autonomous driving unicorns assert that IVs will be commercially deployable by 2025, their implementation is still restricted to small-scale validation due to various issues, among which precise computation of control commands or trajectories by planning methods remains a prerequisite for IVs. This paper aims to review state-of-the-art planning methods, including pipeline planning and end-to-end planning methods. In terms of pipeline methods, a survey of selecting algorithms is provided along with a discussion of the expansion and optimization mechanisms, whereas in end-to-end methods, the training approaches and verification scenarios of driving tasks are points of concern. Experimental platforms are reviewed to facilitate readers in selecting suitable training and validation methods. Finally, the current challenges and future directions are discussed. The side-by-side comparison presented in this survey not only helps to gain insights into the strengths and limitations of the reviewed methods but also assists with system-level design choices.
Comparison of Different Methods for Time Sequence Prediction in Autonomous Vehicles
Jul 16, 2020
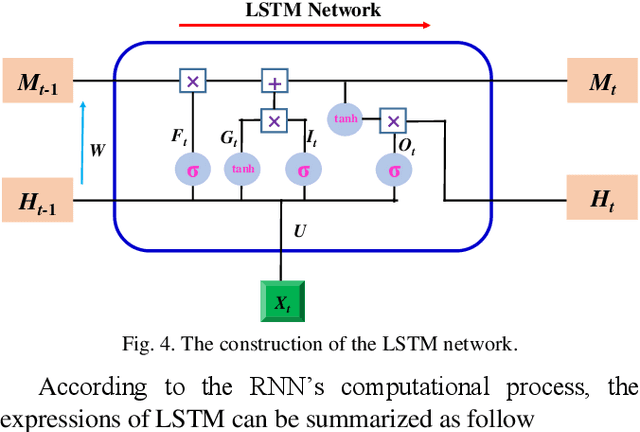
As a combination of various kinds of technologies, autonomous vehicles could complete a series of driving tasks by itself, such as perception, decision-making, planning, and control. Since there is no human driver to handle the emergency situation, future transportation information is significant for automated vehicles. This paper proposes different methods to forecast the time series for autonomous vehicles, which are the nearest neighborhood (NN), fuzzy coding (FC), and long short term memory (LSTM). First, the formulation and operational process for these three approaches are introduced. Then, the vehicle velocity is regarded as a case study and the real-world dataset is utilized to predict future information via these techniques. Finally, the performance, merits, and drawbacks of the presented methods are analyzed and discussed.
CenterNet3D:An Anchor free Object Detector for Autonomous Driving
Jul 16, 2020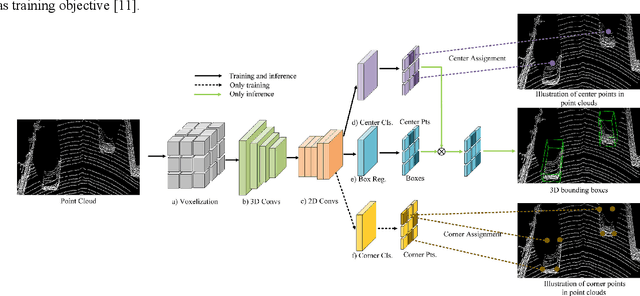
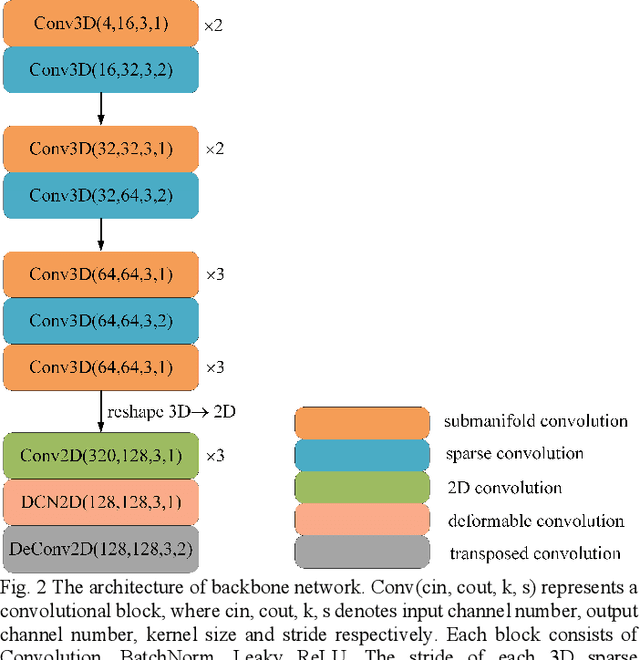

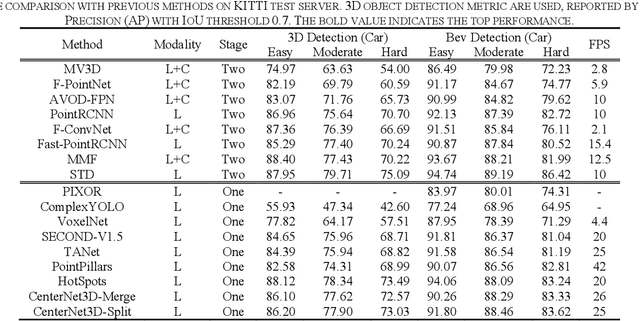
Accurate and fast 3D object detection from point clouds is a key task in autonomous driving. Existing one-stage 3D object detection methods can achieve real-time performance, however, they are dominated by anchor-based detectors which are inefficient and require additional post-processing. In this paper, we eliminate anchors and model an object as a single point the center point of its bounding box. Based on the center point, we propose an anchor-free CenterNet3D Network that performs 3D object detection without anchors. Our CenterNet3D uses keypoint estimation to find center points and directly regresses 3D bounding boxes. However, because inherent sparsity of point clouds, 3D object center points are likely to be in empty space which makes it difficult to estimate accurate boundary. To solve this issue, we propose an auxiliary corner attention module to enforce the CNN backbone to pay more attention to object boundaries which is effective to obtain more accurate bounding boxes. Besides, our CenterNet3D is Non-Maximum Suppression free which makes it more efficient and simpler. On the KITTI benchmark, our proposed CenterNet3D achieves competitive performance with other one stage anchor-based methods which show the efficacy of our proposed center point representation.