 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFRAD: Front-Running Attacks Detection on Ethereum using Ternary Classification Model
Nov 24, 2023



With the evolution of blockchain technology, the issue of transaction security, particularly on platforms like Ethereum, has become increasingly critical. Front-running attacks, a unique form of security threat, pose significant challenges to the integrity of blockchain transactions. In these attack scenarios, malicious actors monitor other users' transaction activities, then strategically submit their own transactions with higher fees. This ensures their transactions are executed before the monitored transactions are included in the block. The primary objective of this paper is to delve into a comprehensive classification of transactions associated with front-running attacks, which aims to equip developers with specific strategies to counter each type of attack. To achieve this, we introduce a novel detection method named FRAD (Front-Running Attacks Detection on Ethereum using Ternary Classification Model). This method is specifically tailored for transactions within decentralized applications (DApps) on Ethereum, enabling accurate classification of front-running attacks involving transaction displacement, insertion, and suppression. Our experimental validation reveals that the Multilayer Perceptron (MLP) classifier offers the best performance in detecting front-running attacks, achieving an impressive accuracy rate of 84.59% and F1-score of 84.60%.
Multi-View Adaptive Fusion Network for 3D Object Detection
Nov 02, 2020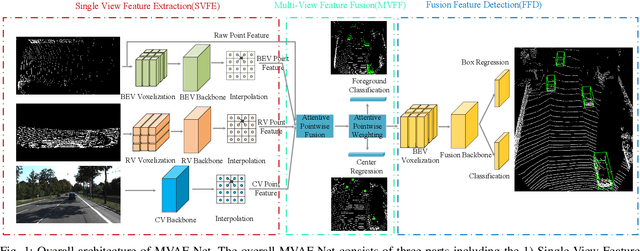

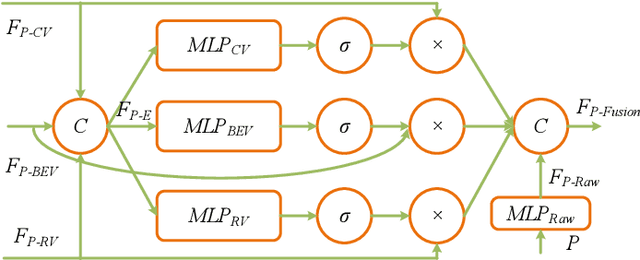
3D object detection based on LiDAR-camera fusion is becoming an emerging research theme for autonomous driving. However, it has been surprisingly difficult to effectively fuse both modalities without information loss and interference. To solve this issue, we propose a single-stage multi-view fusion framework that takes LiDAR Birds-Eye View, LiDAR Range View and Camera View images as inputs for 3D object detection. To effectively fuse multi-view features, we propose an Attentive Pointwise Fusion (APF) module to estimate the importance of the three sources with attention mechanisms which can achieve adaptive fusion of multi-view features in a pointwise manner. Besides, an Attentive Pointwise Weighting (APW) module is designed to help the network learn structure information and point feature importance with two extra tasks: foreground classification and center regression, and the predicted foreground probability will be used to reweight the point features. We design an end-to-end learnable network named MVAF-Net to integrate these two components. Our evaluations conducted on the KITTI 3D object detection datasets demonstrate that the proposed APF and APW module offer significant performance gain and that the proposed MVAF-Net achieves state-of-the-art performance in the KITTI benchmark.
CenterNet3D:An Anchor free Object Detector for Autonomous Driving
Jul 16, 2020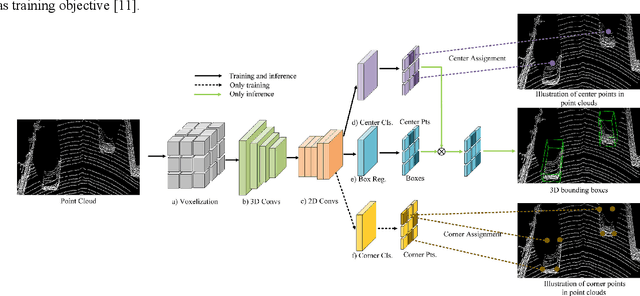
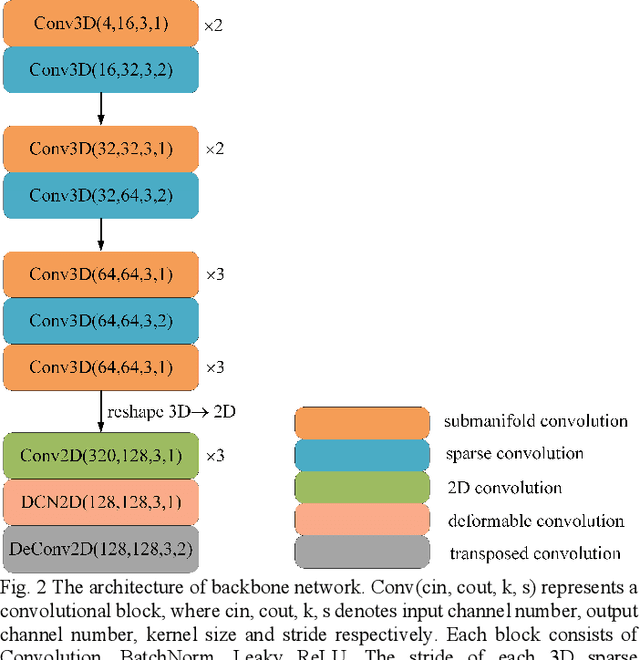

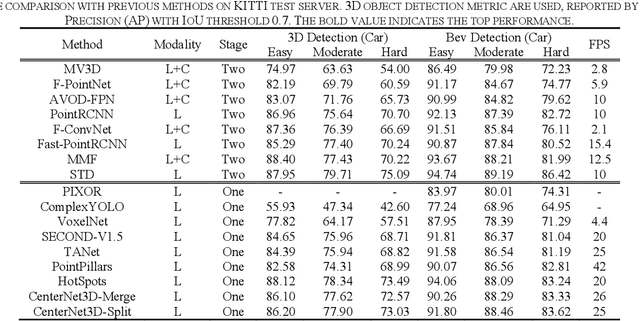
Accurate and fast 3D object detection from point clouds is a key task in autonomous driving. Existing one-stage 3D object detection methods can achieve real-time performance, however, they are dominated by anchor-based detectors which are inefficient and require additional post-processing. In this paper, we eliminate anchors and model an object as a single point the center point of its bounding box. Based on the center point, we propose an anchor-free CenterNet3D Network that performs 3D object detection without anchors. Our CenterNet3D uses keypoint estimation to find center points and directly regresses 3D bounding boxes. However, because inherent sparsity of point clouds, 3D object center points are likely to be in empty space which makes it difficult to estimate accurate boundary. To solve this issue, we propose an auxiliary corner attention module to enforce the CNN backbone to pay more attention to object boundaries which is effective to obtain more accurate bounding boxes. Besides, our CenterNet3D is Non-Maximum Suppression free which makes it more efficient and simpler. On the KITTI benchmark, our proposed CenterNet3D achieves competitive performance with other one stage anchor-based methods which show the efficacy of our proposed center point representation.
A Scalable Feature Selection and Opinion Miner Using Whale Optimization Algorithm
Apr 21, 2020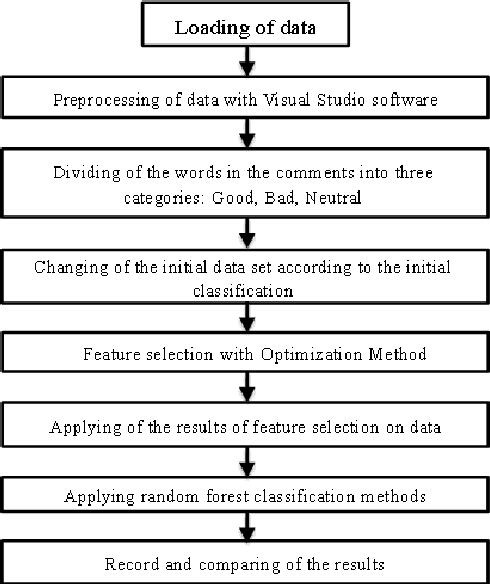
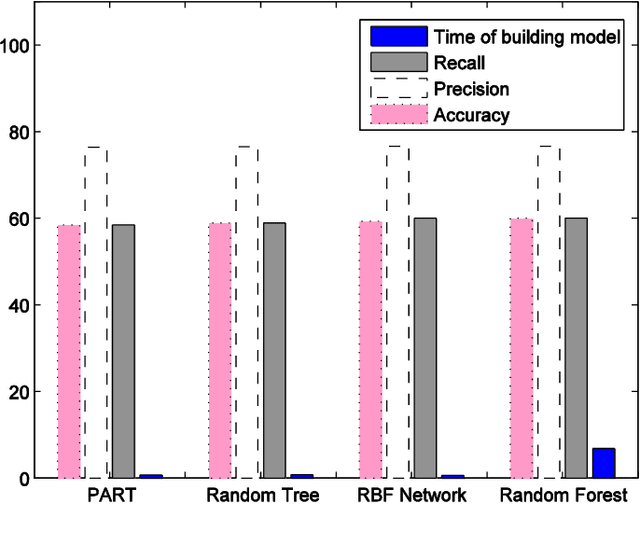
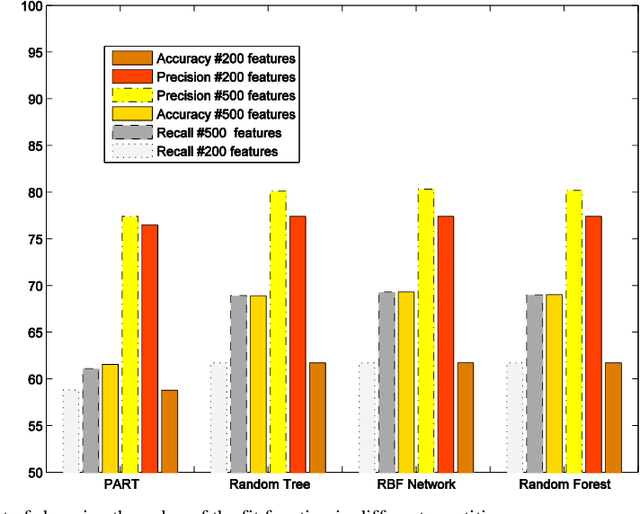
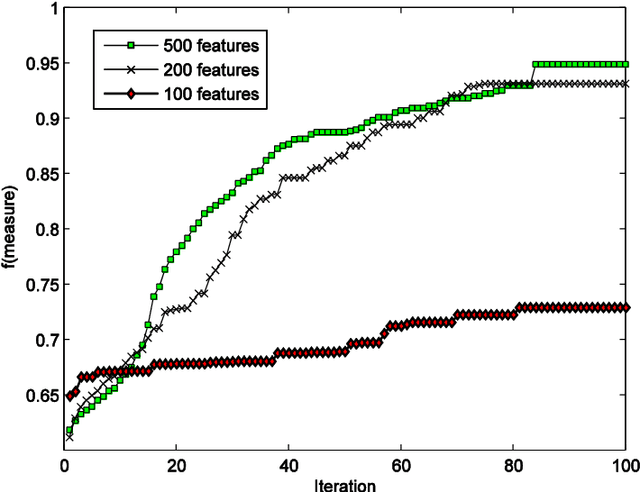
Due to the fast-growing volume of text documents and reviews in recent years, current analyzing techniques are not competent enough to meet the users' needs. Using feature selection techniques not only support to understand data better but also lead to higher speed and also accuracy. In this article, the Whale Optimization algorithm is considered and applied to the search for the optimum subset of features. As known, F-measure is a metric based on precision and recall that is very popular in comparing classifiers. For the evaluation and comparison of the experimental results, PART, random tree, random forest, and RBF network classification algorithms have been applied to the different number of features. Experimental results show that the random forest has the best accuracy on 500 features. Keywords: Feature selection, Whale Optimization algorithm, Selecting optimal, Classification algorithm