 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of Different Methods for Time Sequence Prediction in Autonomous Vehicles
Paper and Code
Jul 16, 2020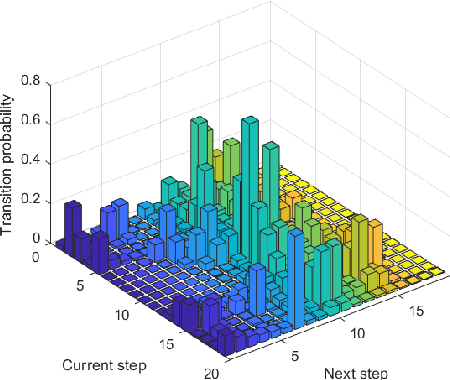
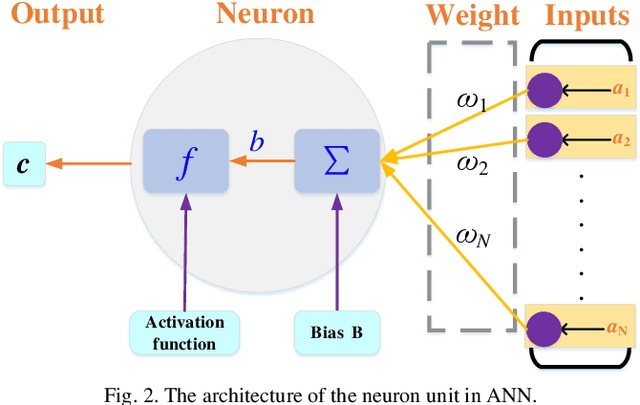
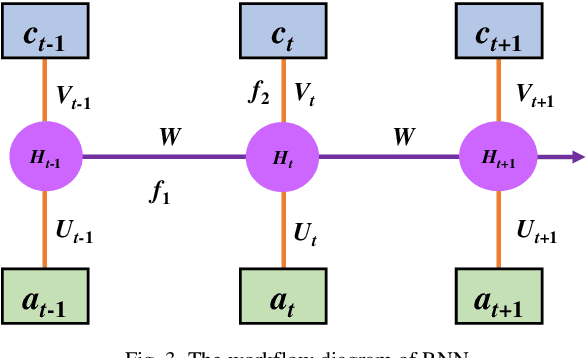
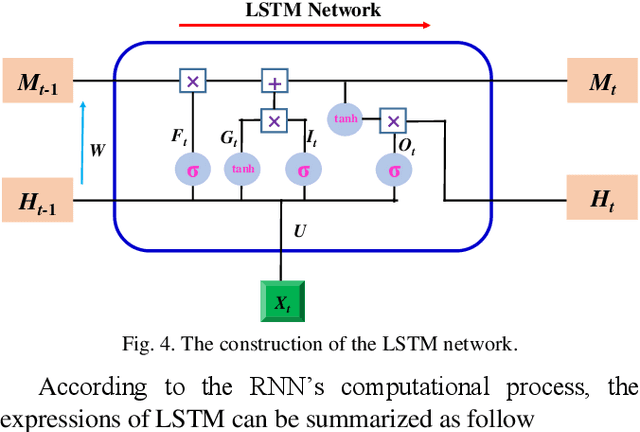
As a combination of various kinds of technologies, autonomous vehicles could complete a series of driving tasks by itself, such as perception, decision-making, planning, and control. Since there is no human driver to handle the emergency situation, future transportation information is significant for automated vehicles. This paper proposes different methods to forecast the time series for autonomous vehicles, which are the nearest neighborhood (NN), fuzzy coding (FC), and long short term memory (LSTM). First, the formulation and operational process for these three approaches are introduced. Then, the vehicle velocity is regarded as a case study and the real-world dataset is utilized to predict future information via these techniques. Finally, the performance, merits, and drawbacks of the presented methods are analyzed and discussed.