 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCertain Head, Uncertain Tail: Expert-Sample for Test-Time Scaling in Fine-Grained MoE
Feb 02, 2026Test-time scaling improves LLM performance by generating multiple candidate solutions, yet token-level sampling requires temperature tuning that trades off diversity against stability. Fine-grained MoE, featuring hundreds of well-trained experts per layer and multi-expert activation per token, offers an unexplored alternative through its rich routing space. We empirically characterize fine-grained MoE routing and uncover an informative pattern: router scores exhibit a certain head of high-confidence experts followed by an uncertain tail of low-confidence candidates. While single-run greedy accuracy remains stable when fewer experts are activated, multi-sample pass@n degrades significantly-suggesting that the certain head governs core reasoning capability while the uncertain tail correlates with reasoning diversity. Motivated by these findings, we propose Expert-Sample, a training-free method that preserves high-confidence selections while injecting controlled stochasticity into the uncertain tail, enabling diverse generation without destabilizing outputs. Evaluated on multiple fine-grained MoE models across math, knowledge reasoning, and code tasks, Expert-Sample consistently improves pass@n and verification-based accuracy. On Qwen3-30B-A3B-Instruct evaluated on GPQA-Diamond with 32 parallel samples, pass@32 rises from 85.4% to 91.9%, and accuracy improves from 59.1% to 62.6% with Best-of-N verification.
Progressive Bird's Eye View Perception for Safety-Critical Autonomous Driving: A Comprehensive Survey
Aug 11, 2025Bird's-Eye-View (BEV) perception has become a foundational paradigm in autonomous driving, enabling unified spatial representations that support robust multi-sensor fusion and multi-agent collaboration. As autonomous vehicles transition from controlled environments to real-world deployment, ensuring the safety and reliability of BEV perception in complex scenarios - such as occlusions, adverse weather, and dynamic traffic - remains a critical challenge. This survey provides the first comprehensive review of BEV perception from a safety-critical perspective, systematically analyzing state-of-the-art frameworks and implementation strategies across three progressive stages: single-modality vehicle-side, multimodal vehicle-side, and multi-agent collaborative perception. Furthermore, we examine public datasets encompassing vehicle-side, roadside, and collaborative settings, evaluating their relevance to safety and robustness. We also identify key open-world challenges - including open-set recognition, large-scale unlabeled data, sensor degradation, and inter-agent communication latency - and outline future research directions, such as integration with end-to-end autonomous driving systems, embodied intelligence, and large language models.
SimWorld: A Unified Benchmark for Simulator-Conditioned Scene Generation via World Model
Mar 18, 2025


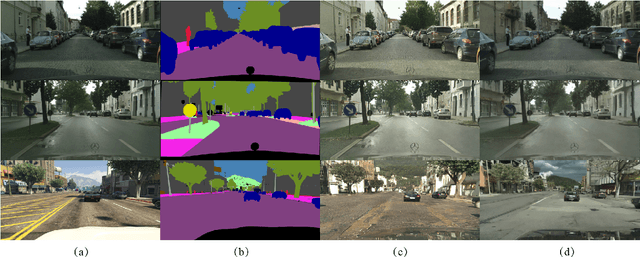
With the rapid advancement of autonomous driving technology, a lack of data has become a major obstacle to enhancing perception model accuracy. Researchers are now exploring controllable data generation using world models to diversify datasets. However, previous work has been limited to studying image generation quality on specific public datasets. There is still relatively little research on how to build data generation engines for real-world application scenes to achieve large-scale data generation for challenging scenes. In this paper, a simulator-conditioned scene generation engine based on world model is proposed. By constructing a simulation system consistent with real-world scenes, simulation data and labels, which serve as the conditions for data generation in the world model, for any scenes can be collected. It is a novel data generation pipeline by combining the powerful scene simulation capabilities of the simulation engine with the robust data generation capabilities of the world model. In addition, a benchmark with proportionally constructed virtual and real data, is provided for exploring the capabilities of world models in real-world scenes. Quantitative results show that these generated images significantly improve downstream perception models performance. Finally, we explored the generative performance of the world model in urban autonomous driving scenarios. All the data and code will be available at https://github.com/Li-Zn-H/SimWorld.